Abstract:
I designed the new hierarchical actuators from scratch.
MN and IM crossover frequency is 0.4Hz and IM and TM crossover frequency is 4Hz in the new design.
I will test it when the IFO can be used next week.
Detail:
As reported in the previous post, it seems very hard to optimize the hierarchical actuator by modifying current filters, so I designed the filter from scratch.
First I measured the ETMX TF by exciting each stage from CAL excitation port to keep the actuator balance as LSC actuators.
During the measurement, I turned off MNH, IMH, BFH dewhitening filters to avoid saturation.
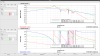
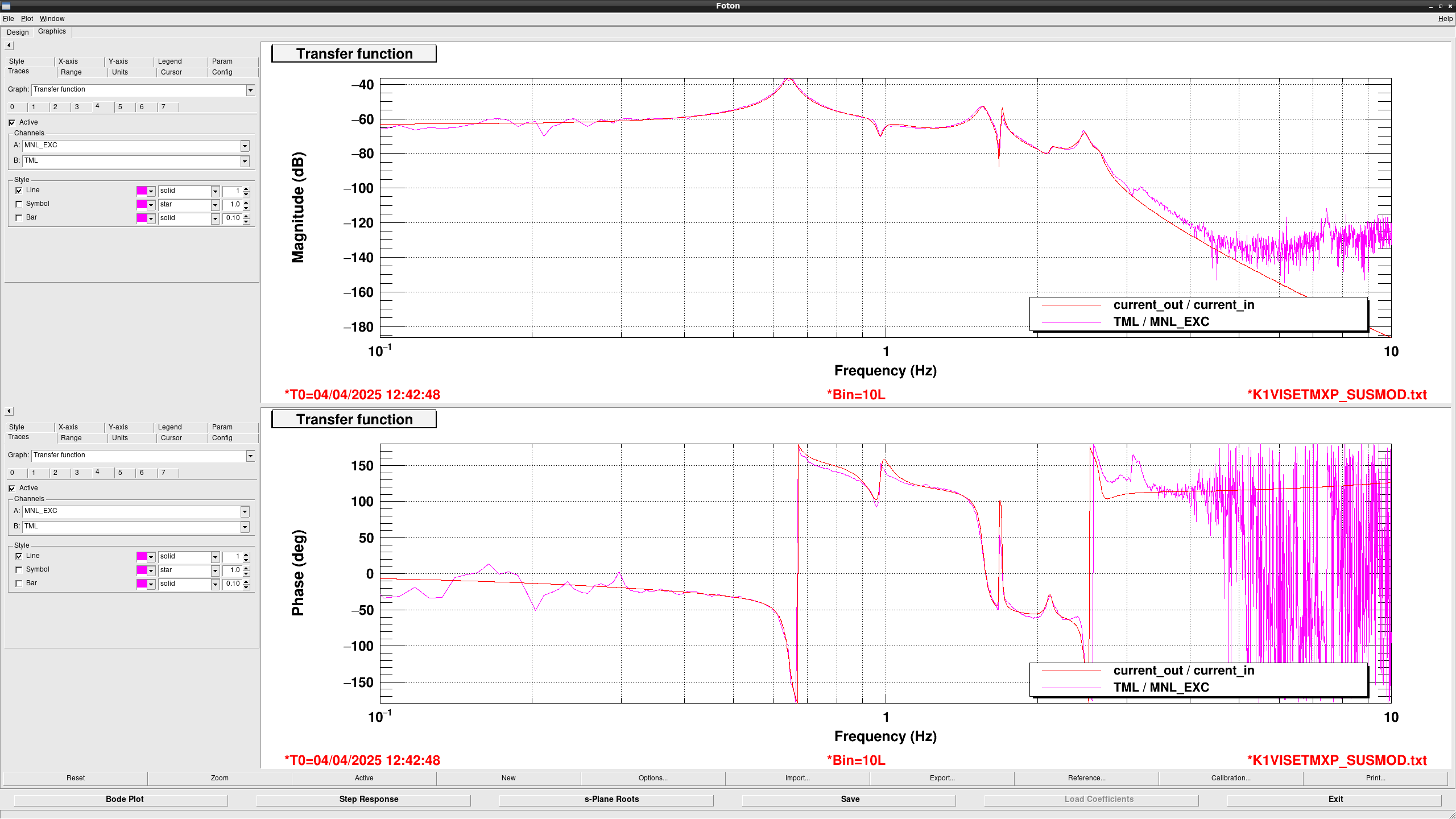
After the measurement, I designed the filter at foton file for SUSMOD as shown in fig1.
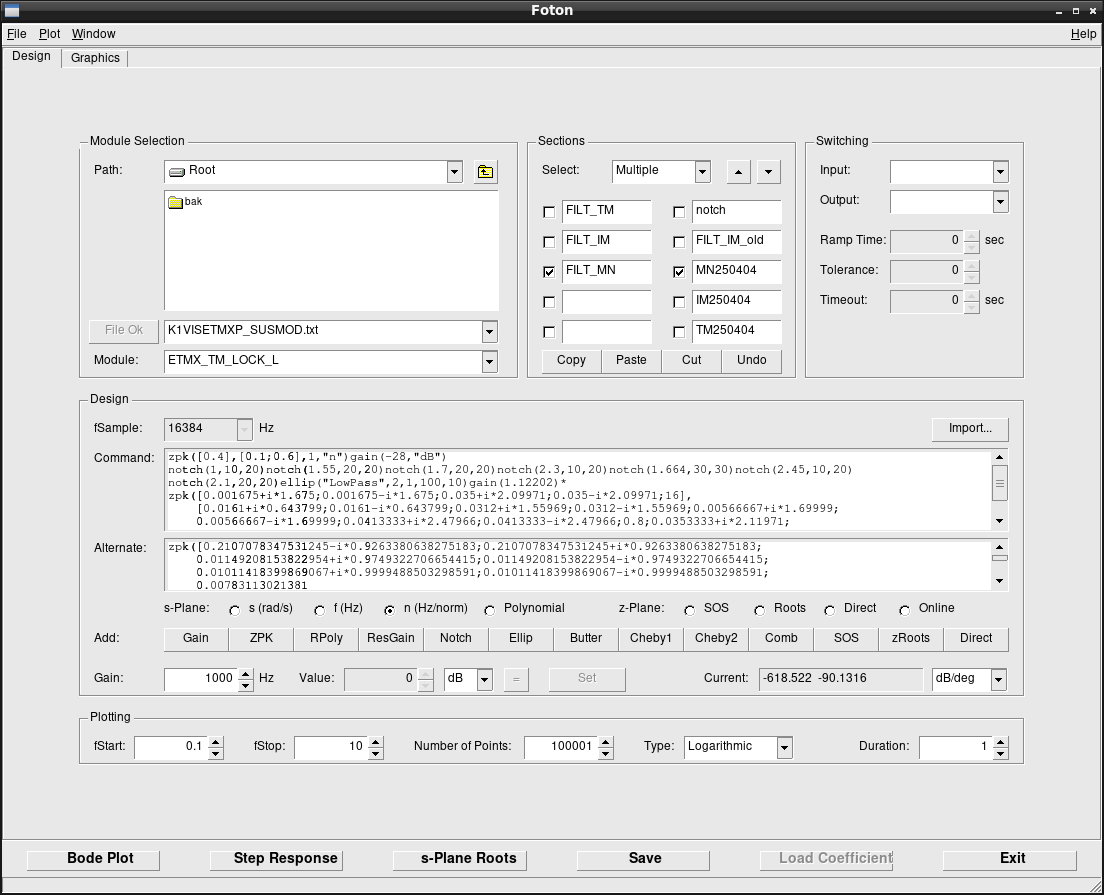
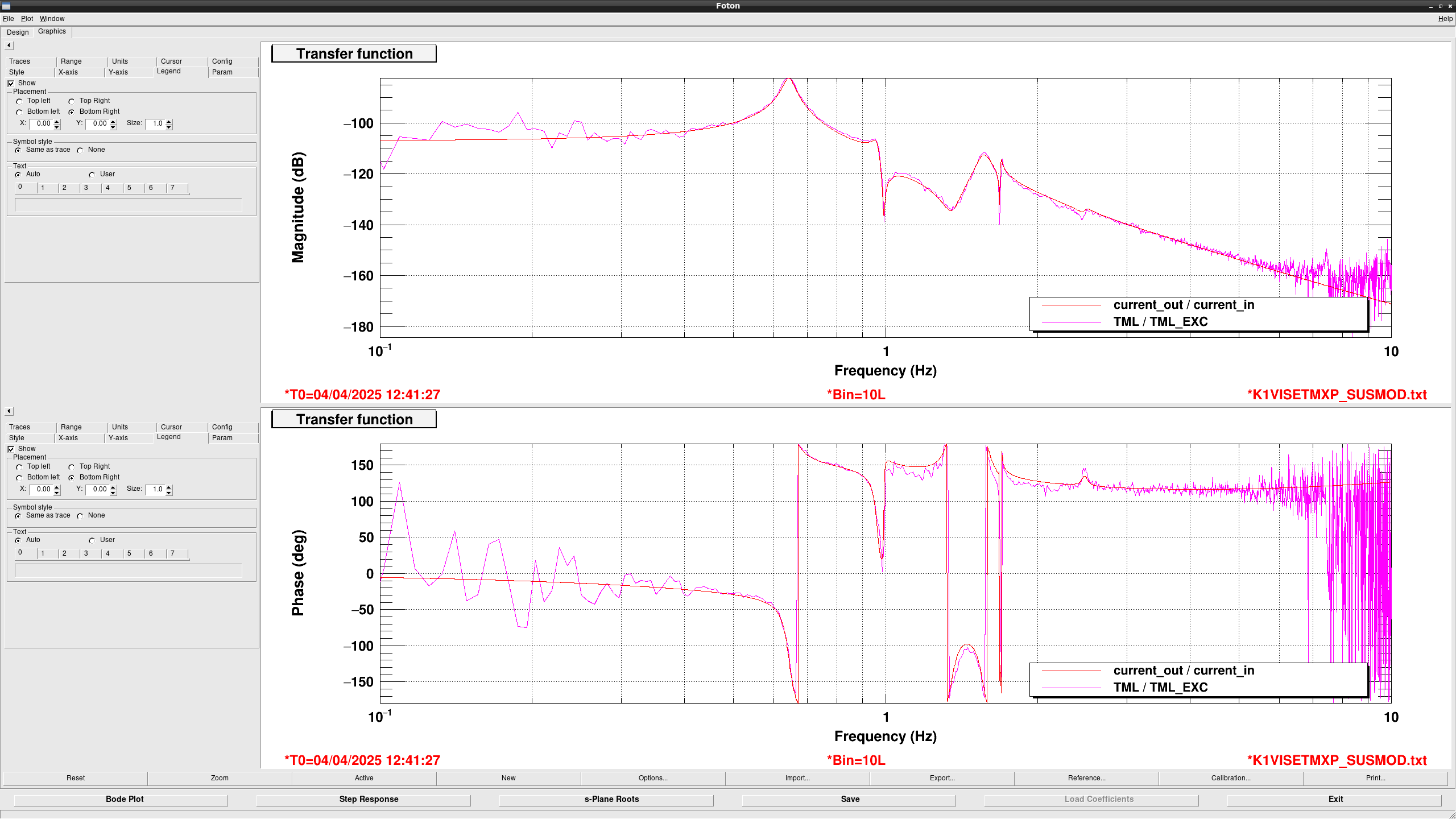
figure 2, 3, and 4 shows the overplots of measured TF and suspension models I made for TM, IM, and MN, respectively.
TM TF seems well modeled while phase of IM seems different around 2-2.5Hz.
Also, MN TF seems to have lower gain at high frequency but it should be fine because MN will be only used for low frequency.
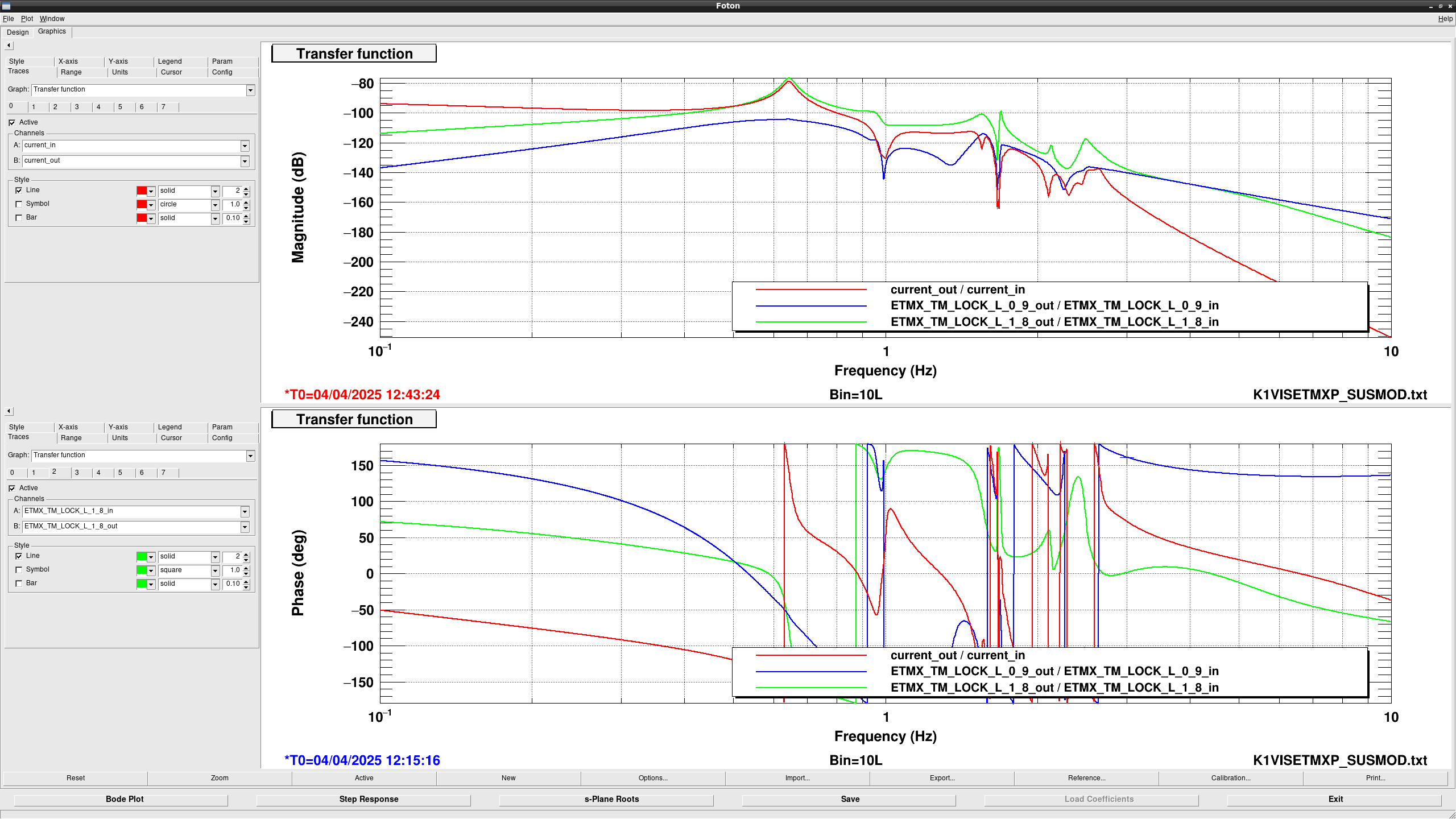
According the the suspension model, it is hard to avoid crossing TM and IM actuators around 2.2Hz if we set the crossover frequency at 3 Hz, which is current nominal value.
So, I slightly increased the crossover frequency and set it at 4Hz in the new design.
Also, it was found that setting crossover frequency between IM and MN around 1Hz due to the complex resonant structure around 1Hz, the crossover frequency between MN and IM is at 0.4Hz in the new design.
Final design of the hierarchical actuator can be seen in fig 5.
I will try to test the new hierarchical actuators next week.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}