Abstract:
I made compensation filter to adjust ETMY suspension plant to ETMX one.
The filter was made at FM4 of K1:VIS-ETMY_TM_LOCK_Y filter bank.
Detail:
To achieve the better actuator decoupling of ASC, I made compensation filter for ETMY yaw plant.
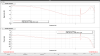
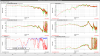
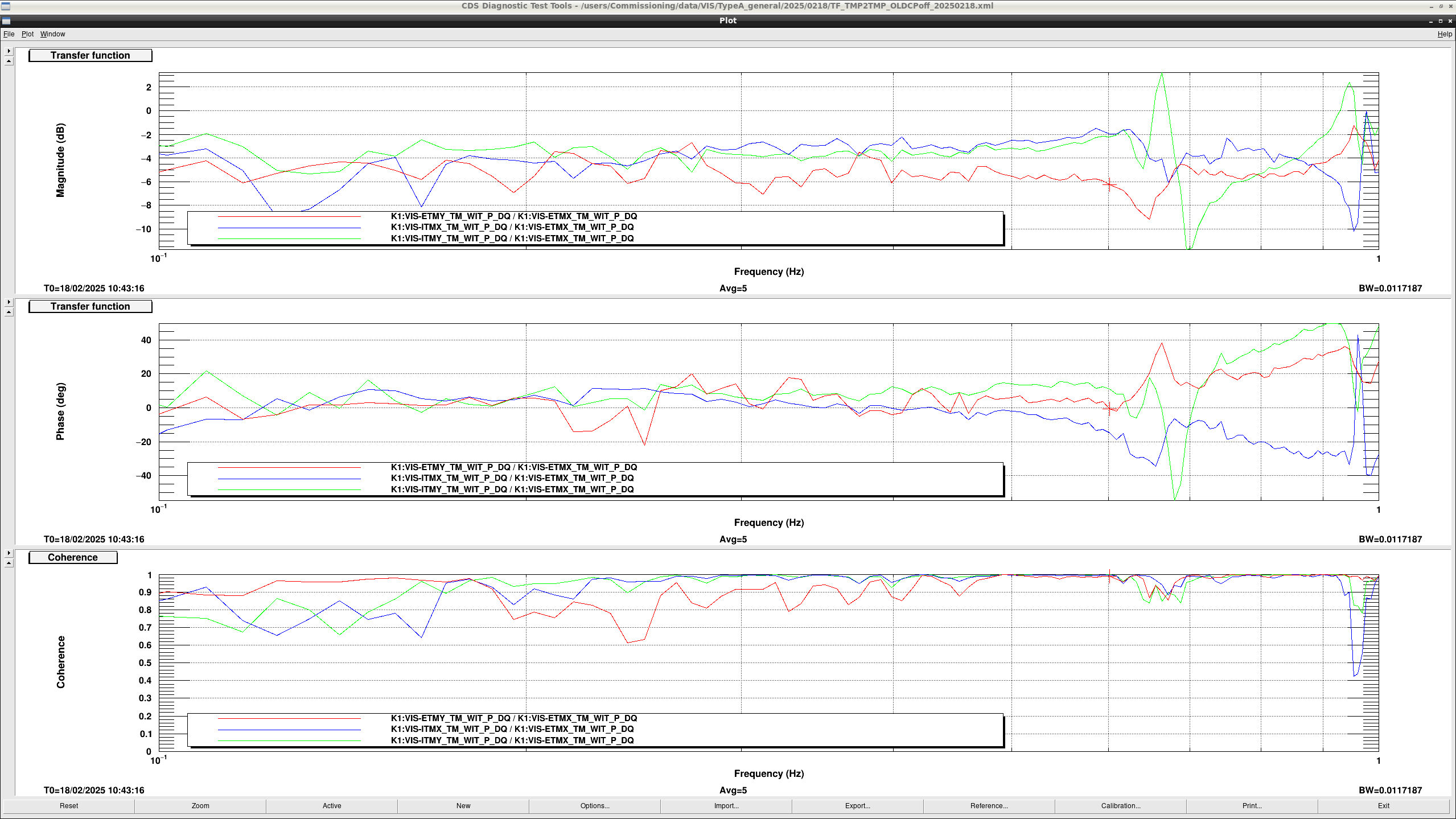
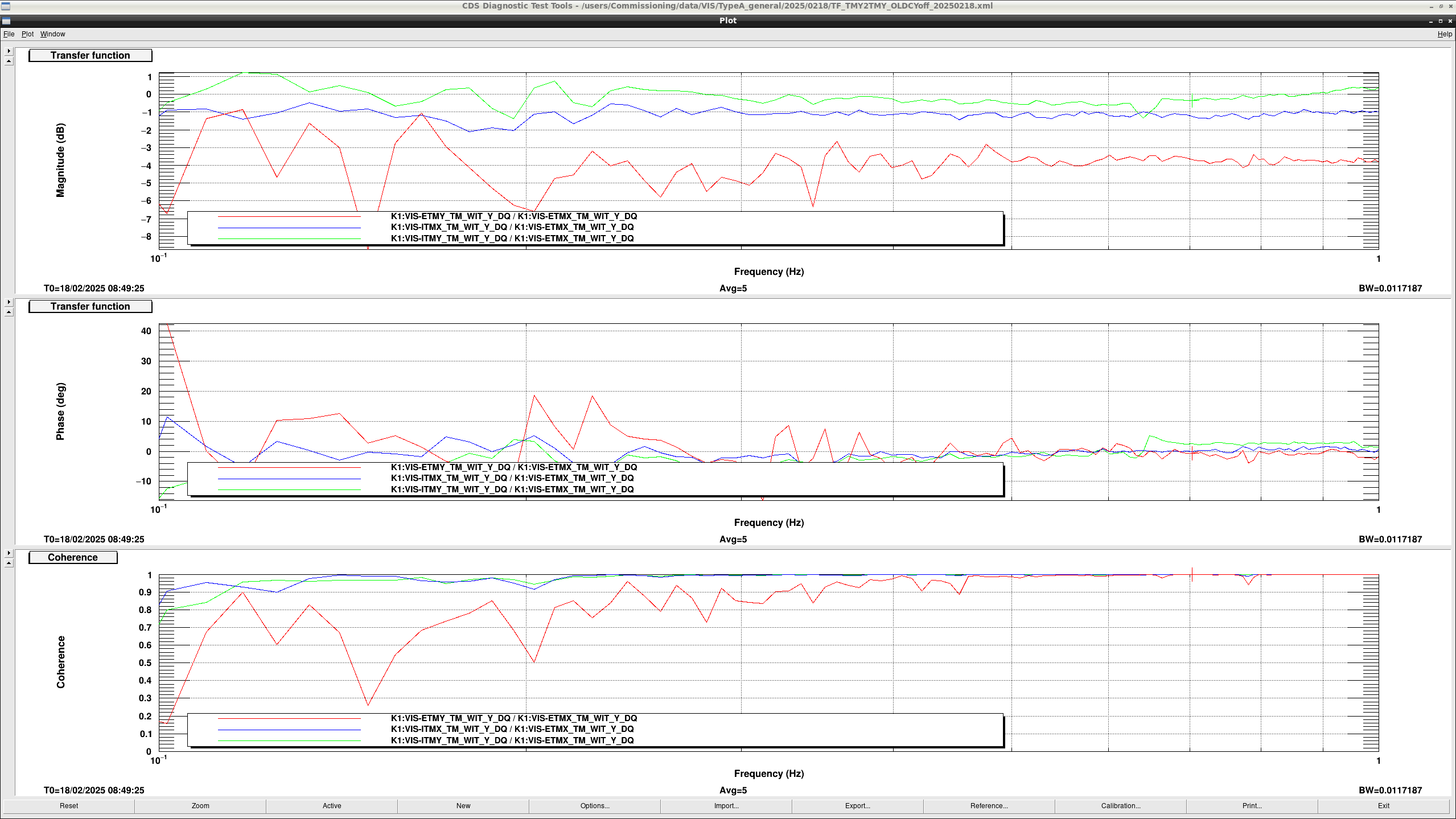
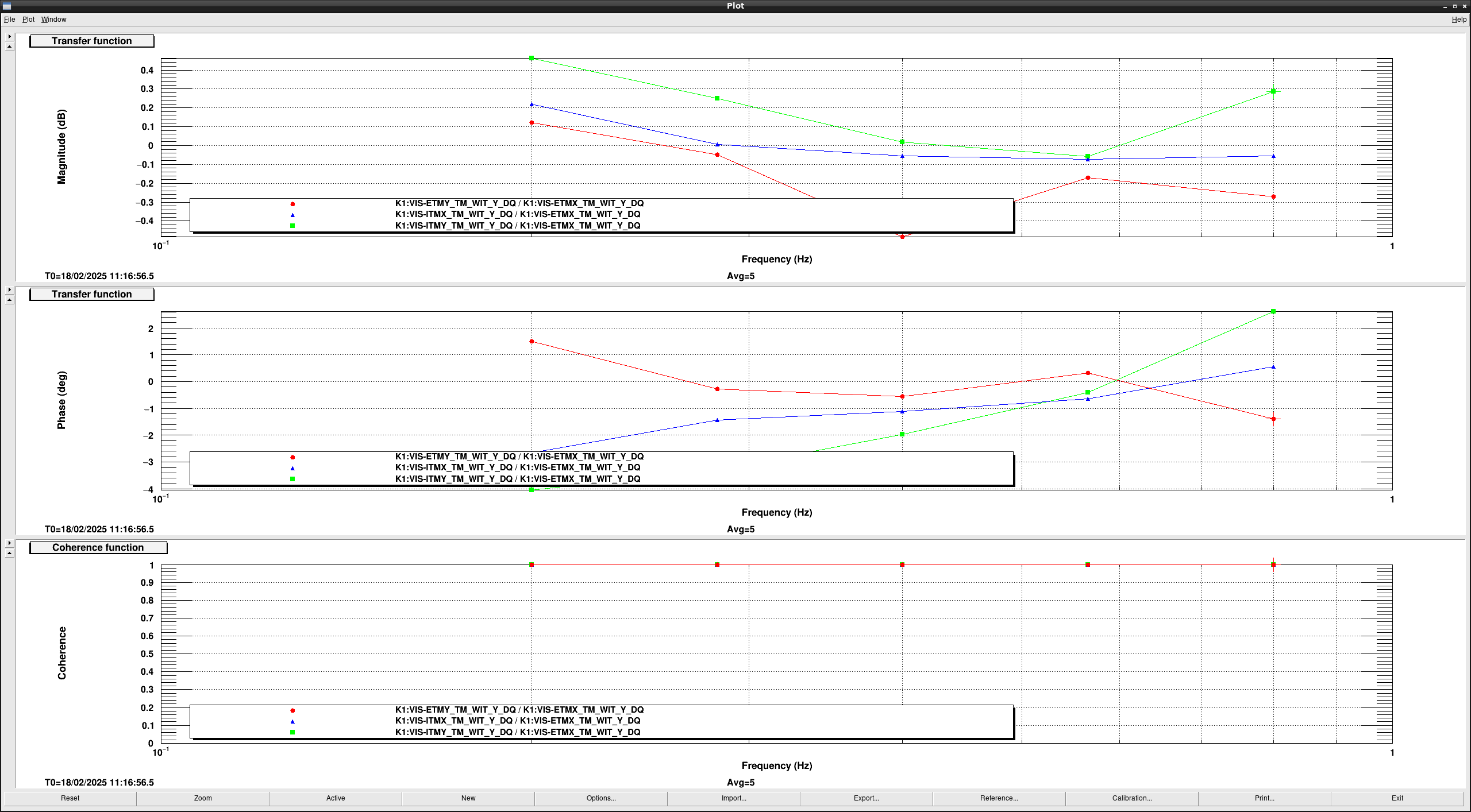
Figure 1 shows the TF from TMY excitation to TMY motion of each test mass.
ETMY has a slightly larger phase difference around 0.3 Hz and 0.8 Hz compared with the other suspensions.
So, I designed compensation filter for ETMY susension plant.
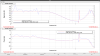
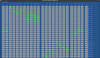
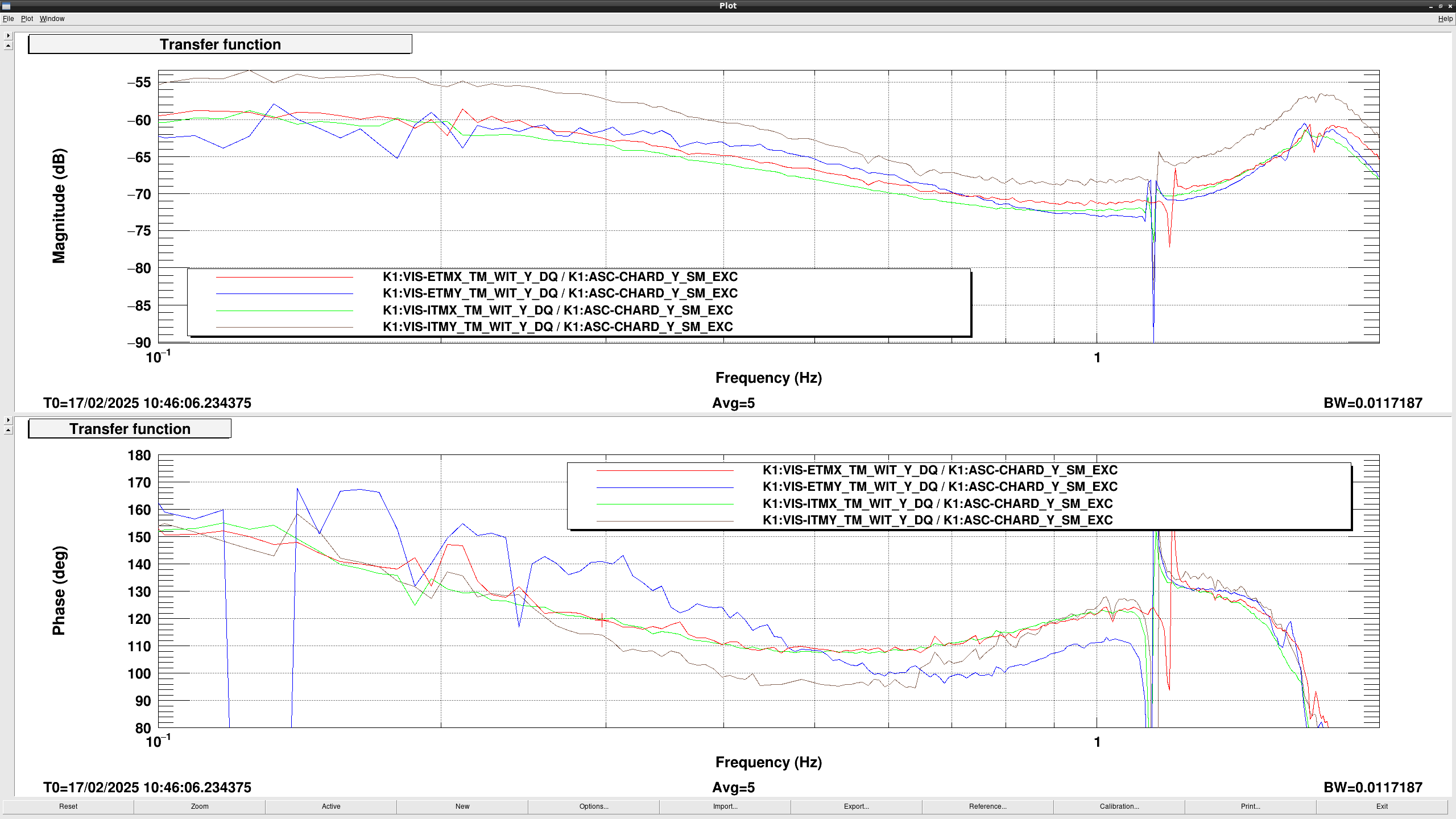
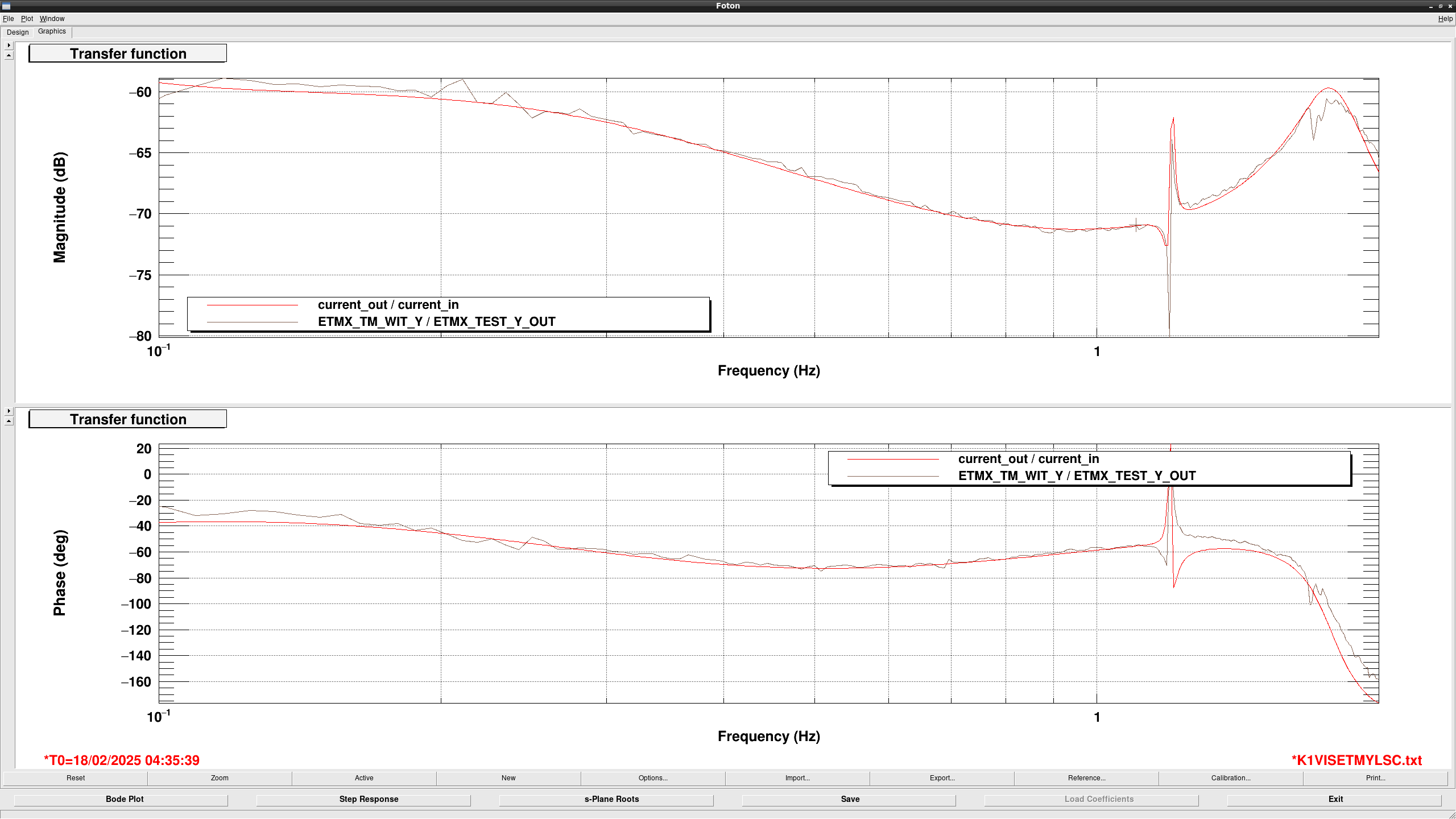
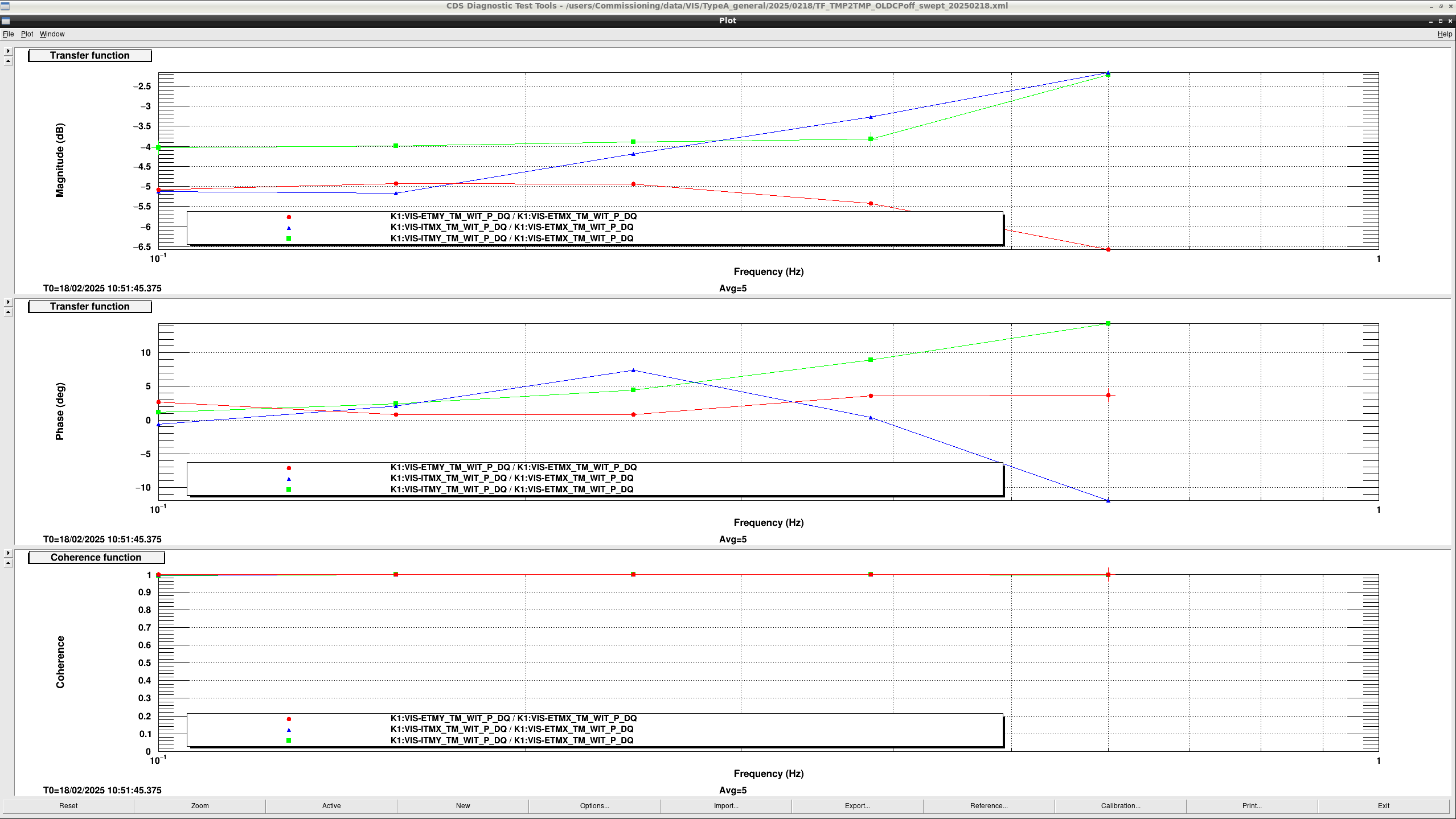
Figure 2 and 3 show the suspension model of ETMX and ETMY I designed, respectively.
Though high frequency gain and phase are slightly different between models and measurement, gain and phase below 1 Hz seems well matched.
Since the current UGF of yaw ASC is 0.6Hz, it should be fine at this moment.
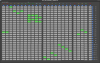
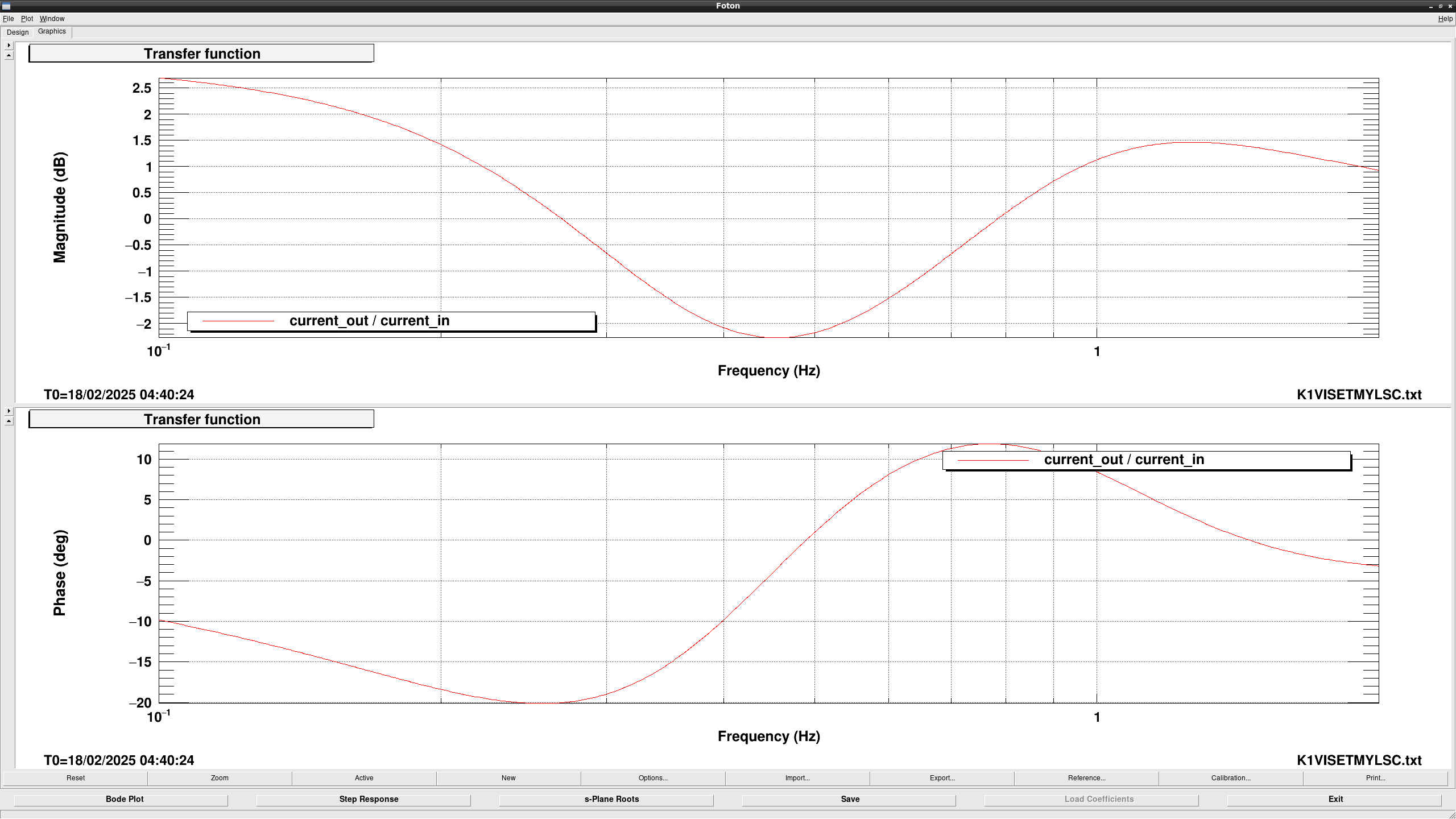
According from the zero-pole vales of the model, I made a compensation filter (fig4).
I will test this filter when I willhave time.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}