Abstract:
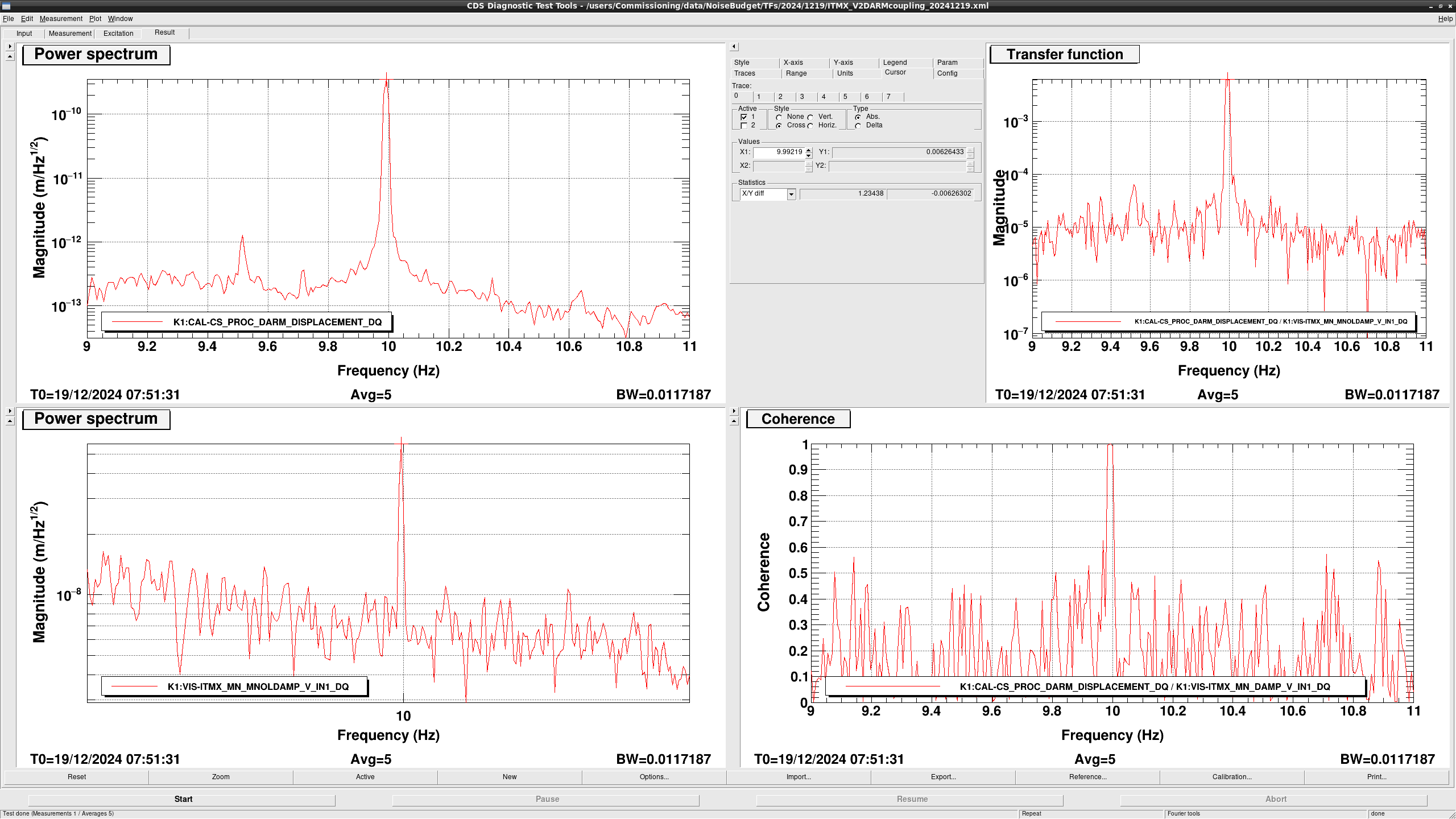
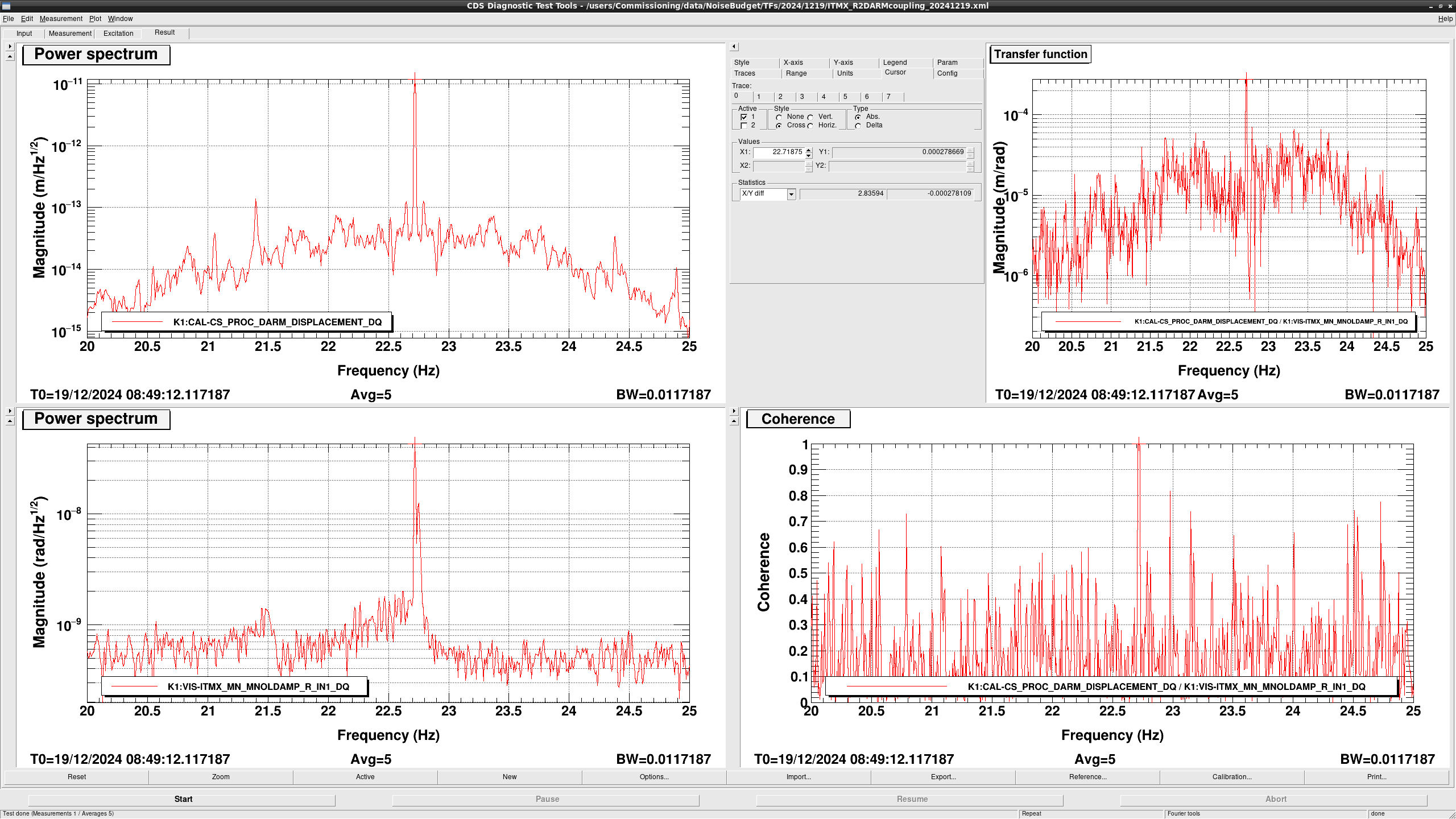
I measured the coupling from ITMX V/R motion to DARM by using V resonance at 10Hz and R resonance at 22.7Hz.
Measured coupling values are 3.4e-3 m/m and 1.4e-4 m/rad for V and R, respectively.
Detail:
To evaluate the thermal noise from vertical/roll modes, I measured the coupling from vertical/roll to DARM by using ITMX.
I excited 22.7 Hz resonances for R and 10 Hz for V by using MN actuators to measure the coupling.
To monitor the vertical/roll motions, MN OpLevs are used.
During the measurement, I engaged the resonant gain (FM4 of DARM2 filter, filter shape was changed every measurement) at measured frequency to reduce the RMS of error signals.
Top right figure in fig1 and 2 shows the TF from local sensors to DARM displacement.
Since MNV/R OpLevs were calculated into the unit of um and urad,respectively, the TF gain directly represents the coupling from MNV/R motion to DARM.
Note that it is not the coupling factor from TM motions to DARM, so it is necessary to estimate the ratio between MN motions and TM motions.
Obtained values are as follows:
MNV: 6.26e-3 m/m @ 10 Hz resonance
MNR: 2.79e-4 m/rad @ 22.7 Hz resonance
Roughly speaking, the difference betweenTM motion and MN motion are decided by mass (or moment of inertia) of TM and IM+MN.
The mass and moment of inertia ratio between TM and IM+MN are 0.54 (22.88(TM)/(20.13(IM)+22.53(MN))) and 0.50(0.14(TM)/(0.095(IM)+0.14(MN))), respectively.
So, the couplings from TM motion to DARM are
TMV: 3.4e-3 m/m
TMR: 1.4e-4 m/rad.
Note:
Measured TMV to DARM coupling is very close to the ideal limit (1/300=3.33e-3 m/m), so it would be difficult to reduce the coupling even if the vertical thermal noise is a problematic.
Used mass and moment of inertia value is the one in the SUMCON model named TypeA180429_300K.m.


{kind=link}
{kind=link}