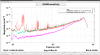
We measued TFs from PDA1_RF45_I_ERR and CARM_SERVO_MIXER_DAQ_OUT which are in-loop sensors for CARM to the DARM displacement (CAL-CS_PROC_DARM_DISPLACEMENT), and also measured the TF from PDA3_RF45_I_ERR, which is an out-loop sensor for CARM to the DARM displacement when we excited CARM from CARM_SERVO_EXC_A_CALI. Fig.1 shows the results. (Note that, the unit of the TF from MIXER_DAQ_OUT to DARM is m/V, the others' unit is m/cnt).
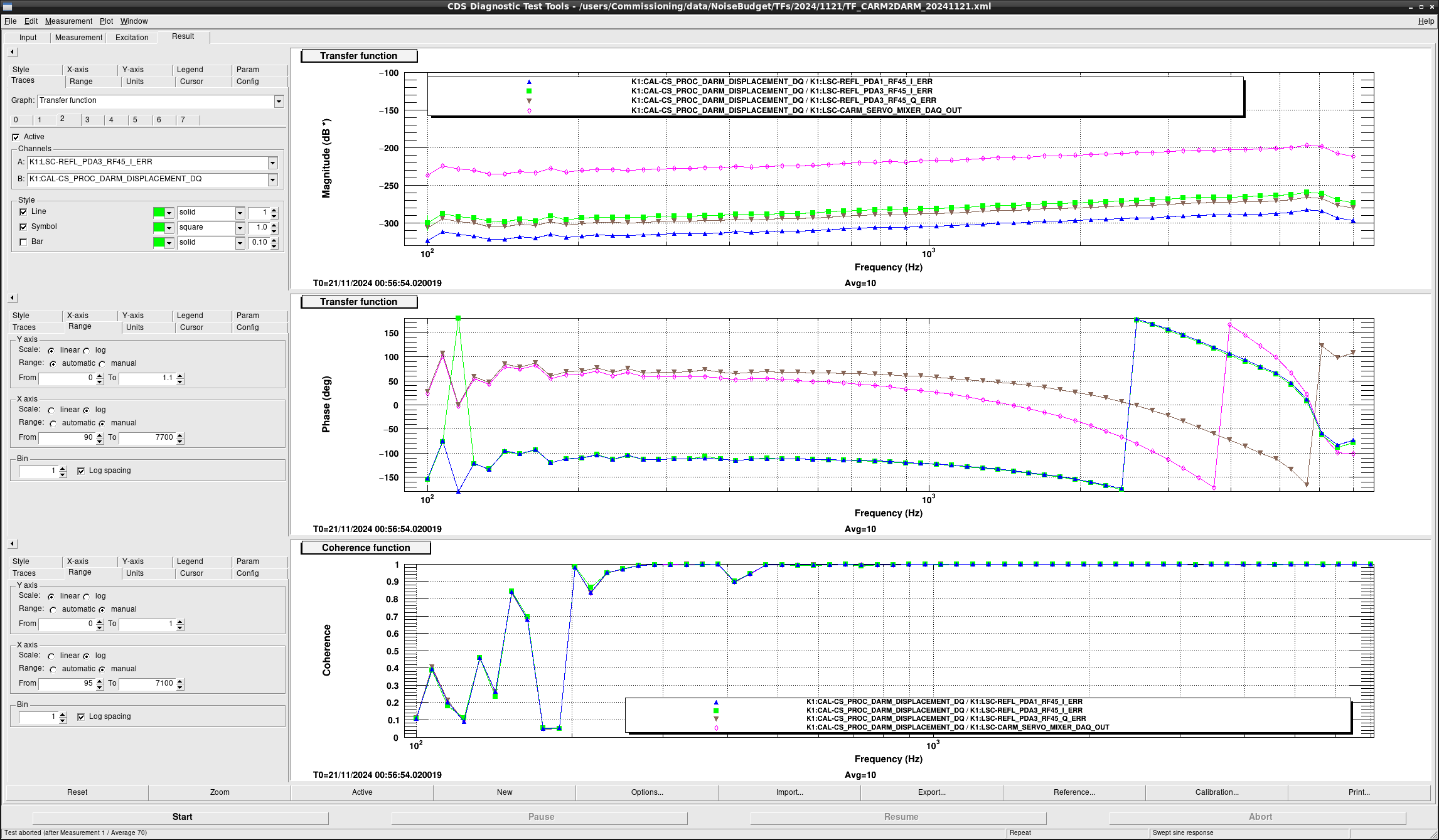
Then, we projected the current spectra of MIXER_DAQ_OUT as the in-loop sensor and PDA3_RF45_I_ERR as the out-loop sensor in DARM sensitivity by using each TF. Fig.2 shows each projection, magenta is the projection from MIXER_DAQ_OUT, green is from PDA3_RF45_I_ERR. According to the magenta line, the current in-loop CARM noise seems not to limit the current sensitivity. Unfortunately, the current PDA3 output in high frequency region seems to be dominate by the other noise due to the low input power to PDA3.
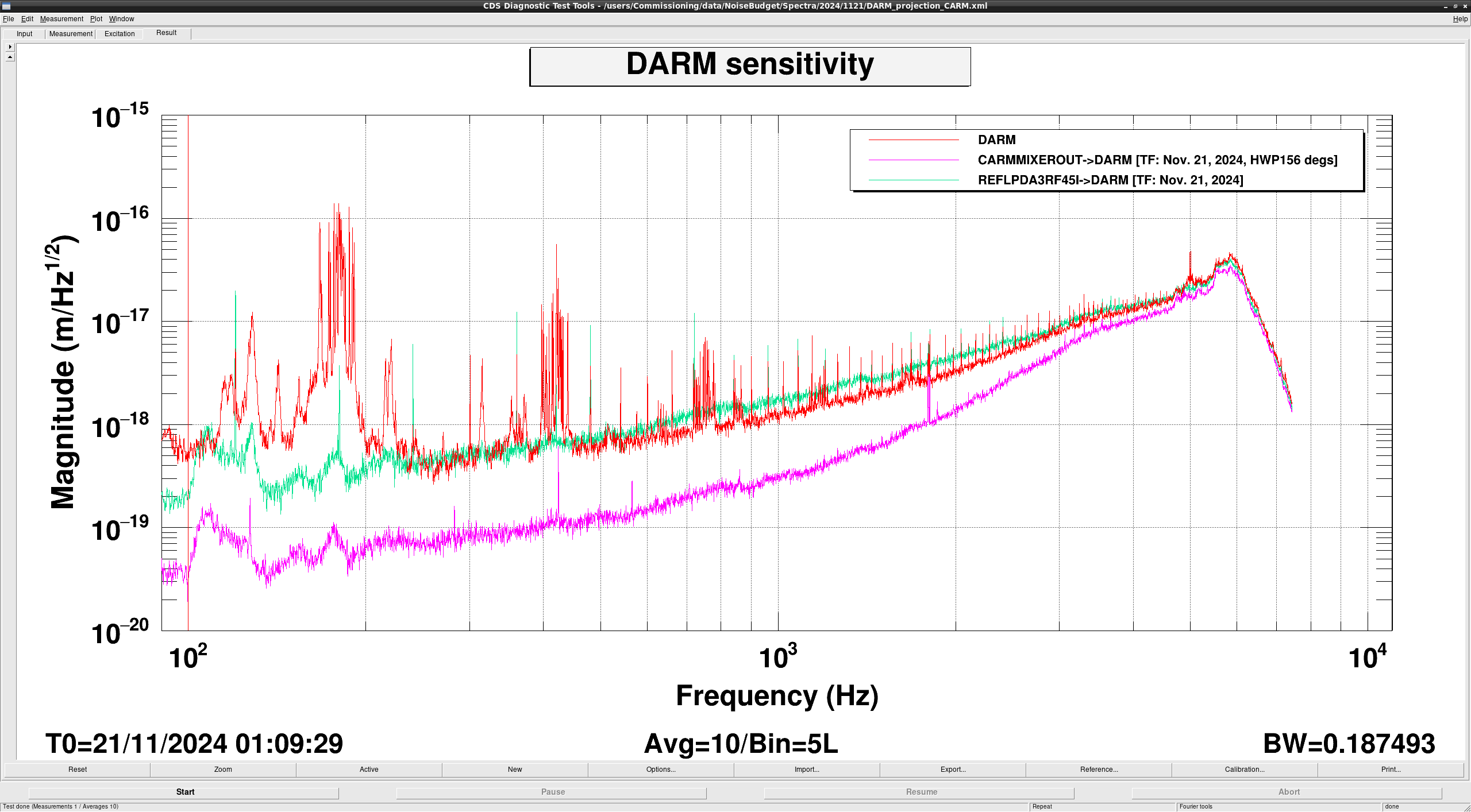
Next, we projected the sensing noises of MIXER_DAQ_OUT and PDA3_RF45_I_ERR. We picked up each raw sensing noise spectrum which were measured by Ushiba-san (see the detail in klog31636) in /users/Commissioning/data/CARM/2024/1114/SPE_CARM-20dB_CMS_sensingnoise.xml. Fig. 3 shows the projected sensing noises using each TF, the orange line is the sensing noise of MIXER_DAQ. Then, I tried to compensated roughly the input power difference between the orange and the magenta. The input power when the orange was measured was 2988 cnts, and the power when the magenta was measured was 846 cnts. So I assumed this orange sensing noise is only shot noise (honestly, orange line seems to have a shape so this assumption is overspeaking), and devided the orange line by (2988/846)^(1/2) ~ 3^(1/2). The black line is divied one. If the current sensing noise is only shot noise, the current CARM noise is limited by the sensing noise.


{kind=link}
{kind=link}
{kind=link}