Ushiba, Tanaka
We performed the noise budget for CARM from a in-loop PD signal (REFL_PDA1_RF45_I_ERR) with the DGS injection which was installed this morning (klog31283).
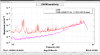
Fig. 1 shows the TFs from MCL_IN1(red), REFL_PDA1_RF45_I_ERR(blue), REFL_PDA3_RF45_{I,Q}_ERR (green, brown) to raw DARM_DISPLACEMENT with the injection from the K1:LSC-CARM_SERVO_EXC_A_CALI_EXC ch. which REFL_PDA1 is a in-loop sensor, REFL_PDA3 is a out-loop sensor. The gain of out-loops (green, brown) seems to be higher than the gain of the in-loop (blue). This indicates the sensitivities of out-loops are lower than the one of in-loop maybe because the phasing for out-loop is not optimized.
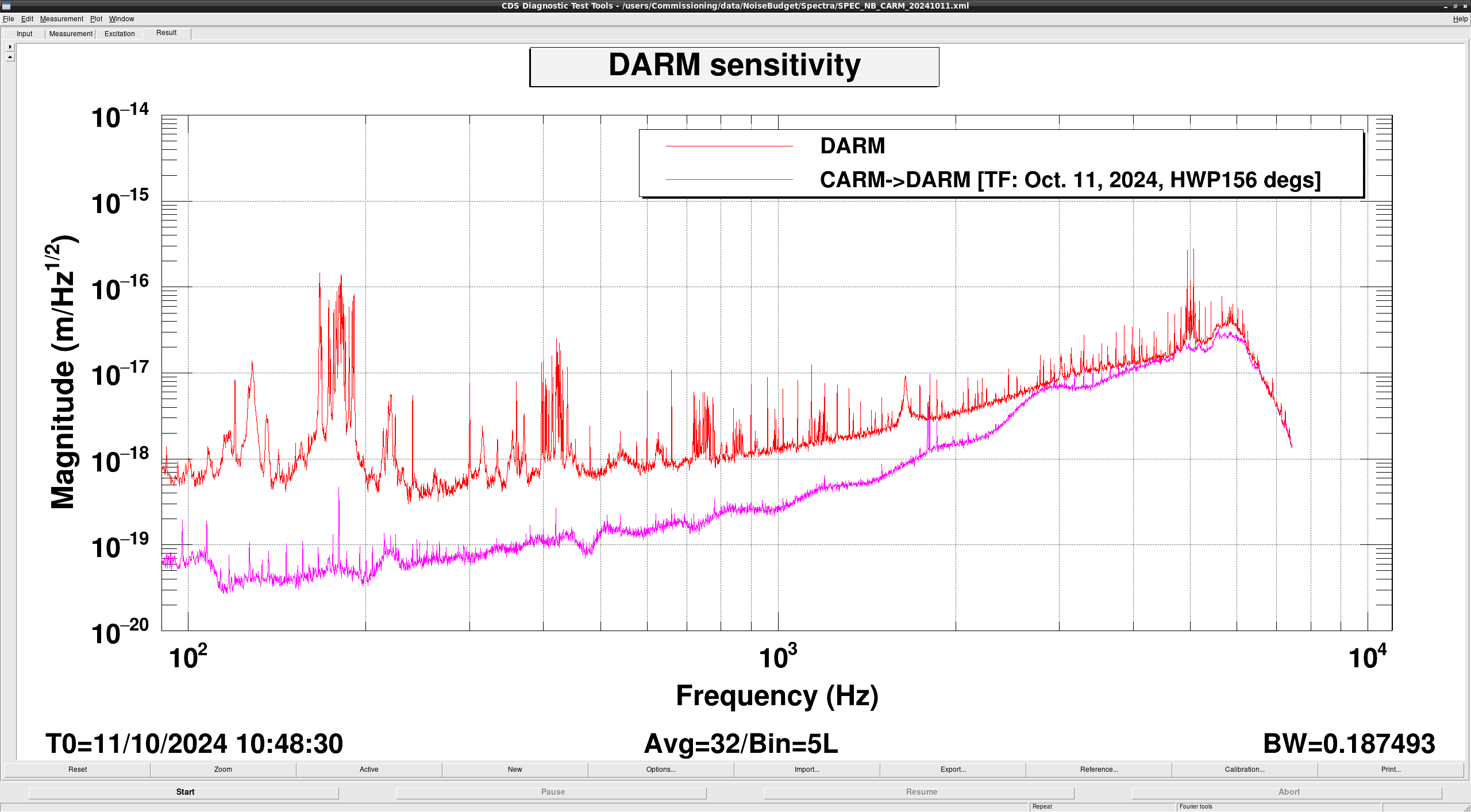
Fig. 2 shows the TF from REFL_PDA1_RF45_I_ERR to DARM_DISPLACEMENT which is calibrated to m. We used the value which is used in /users/Commissioning/templates/diaggui/DARM/CAL_DARM_DISP.xml as the calibration factor.
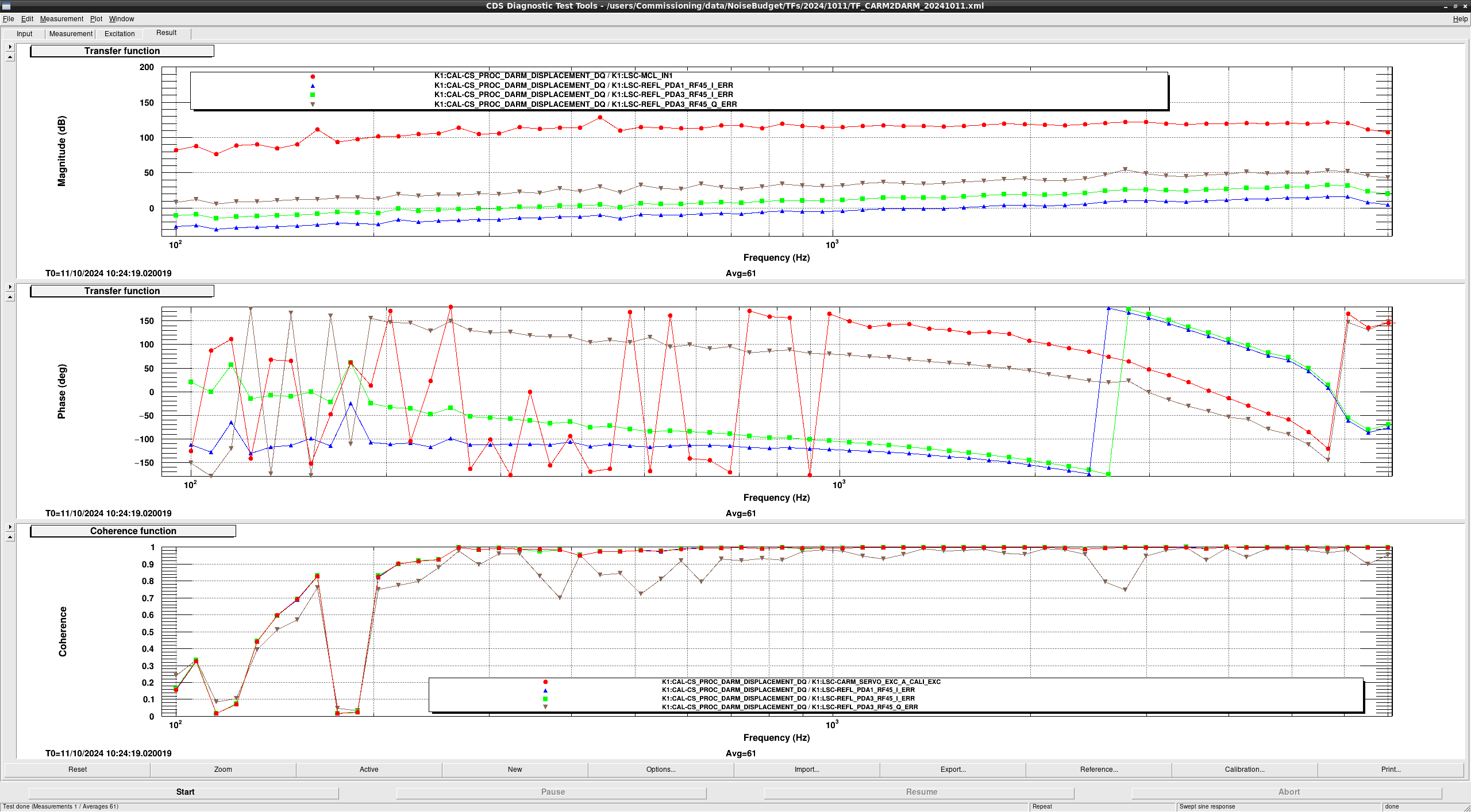
Fig.3. shows the comparison DARM with CARM, red is the DARM sensitivity, and magenta is the projection from in-loop CARM signal based on the TF in fig.2. As you can see, we become able to measure the CARM noise with DGS.


{kind=link}
{kind=link}
{kind=link}