With KTanaka-san
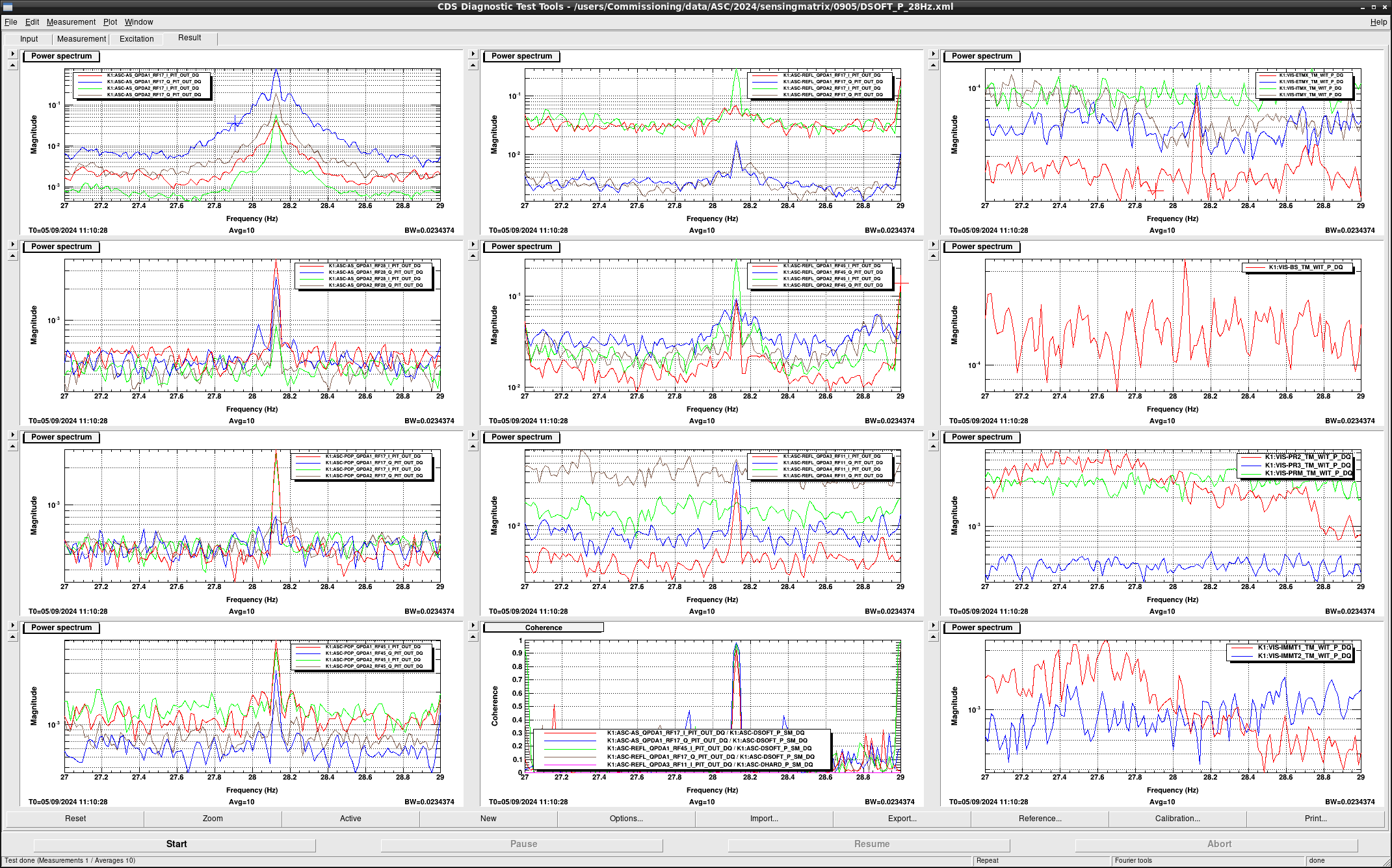
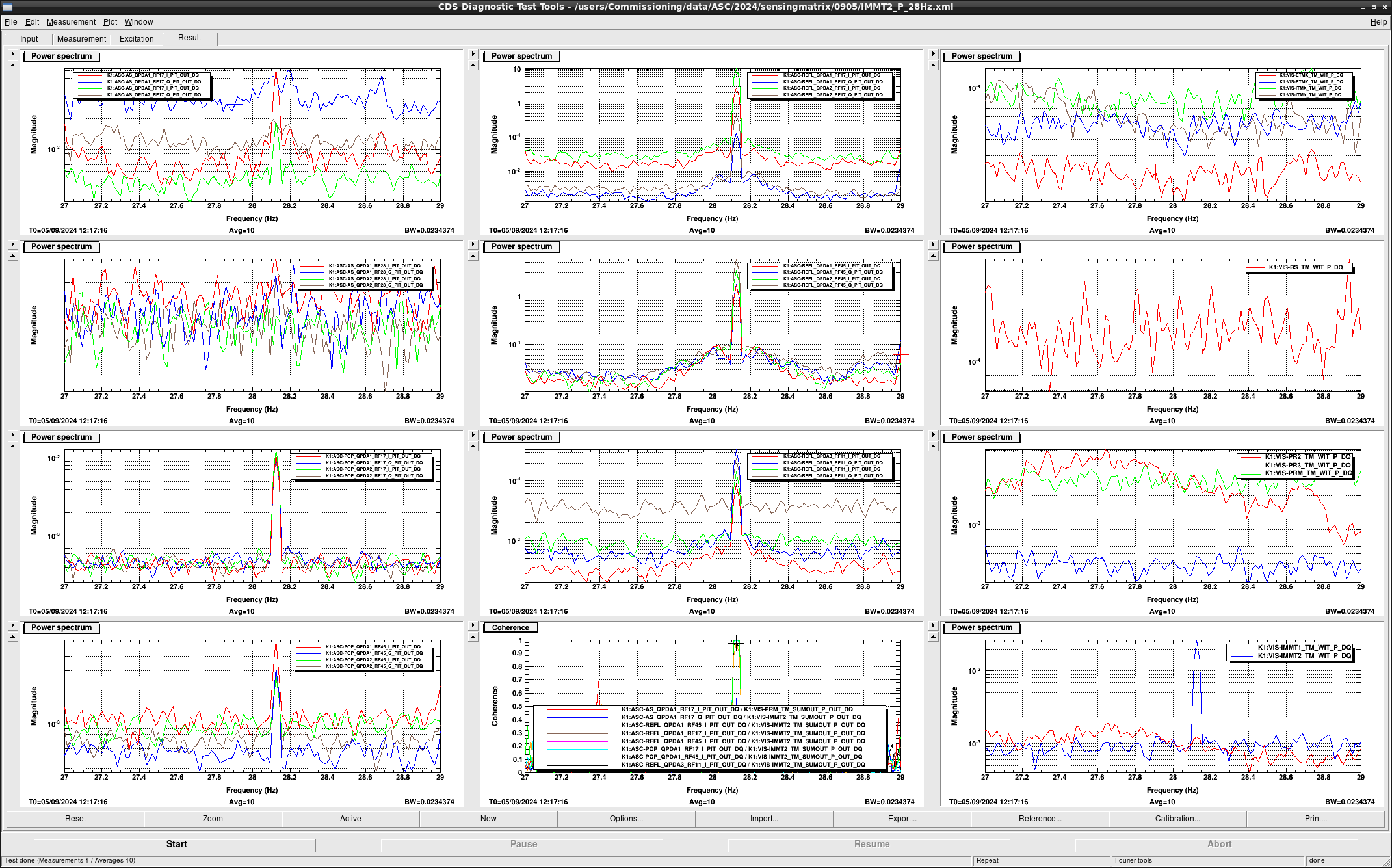
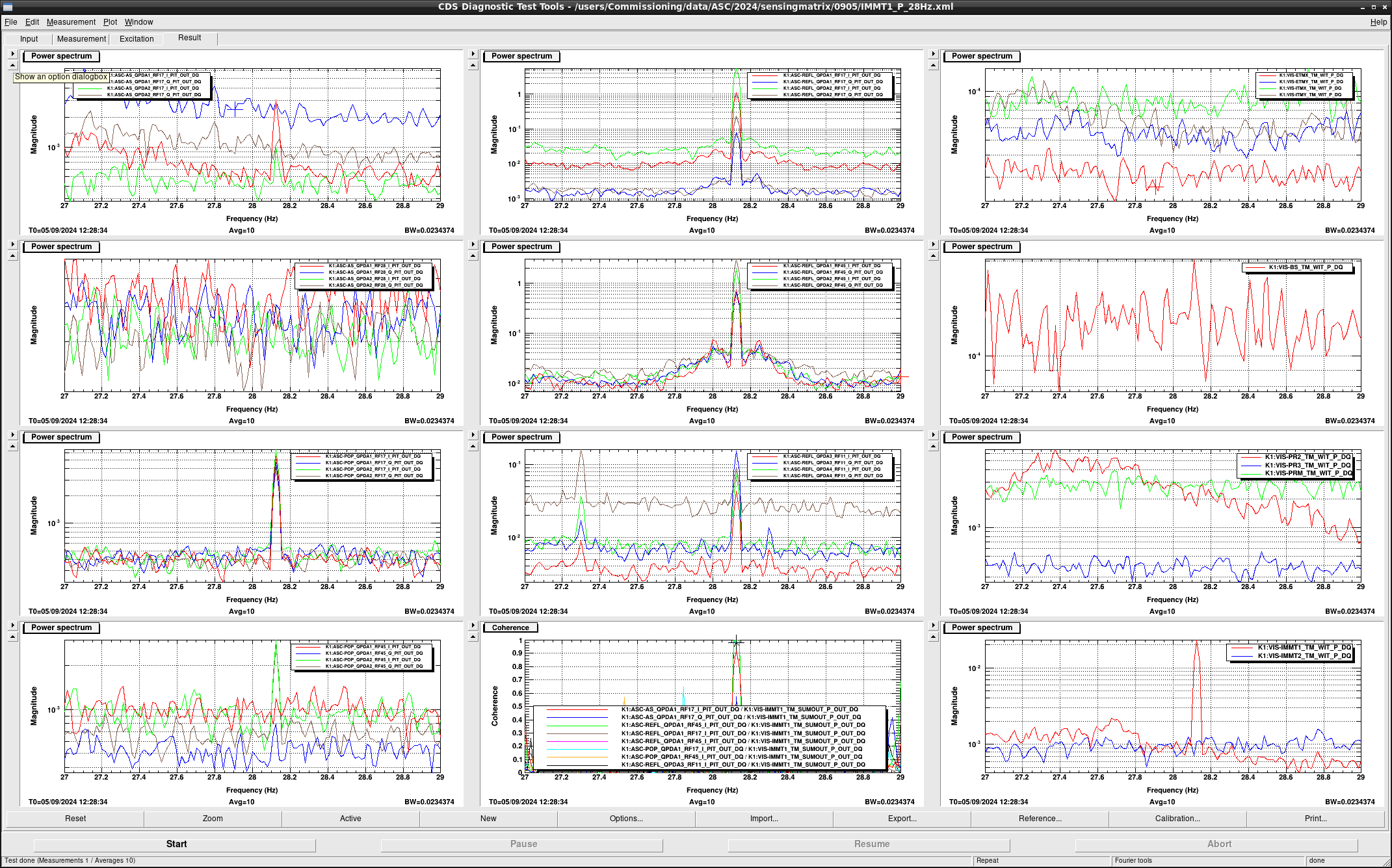
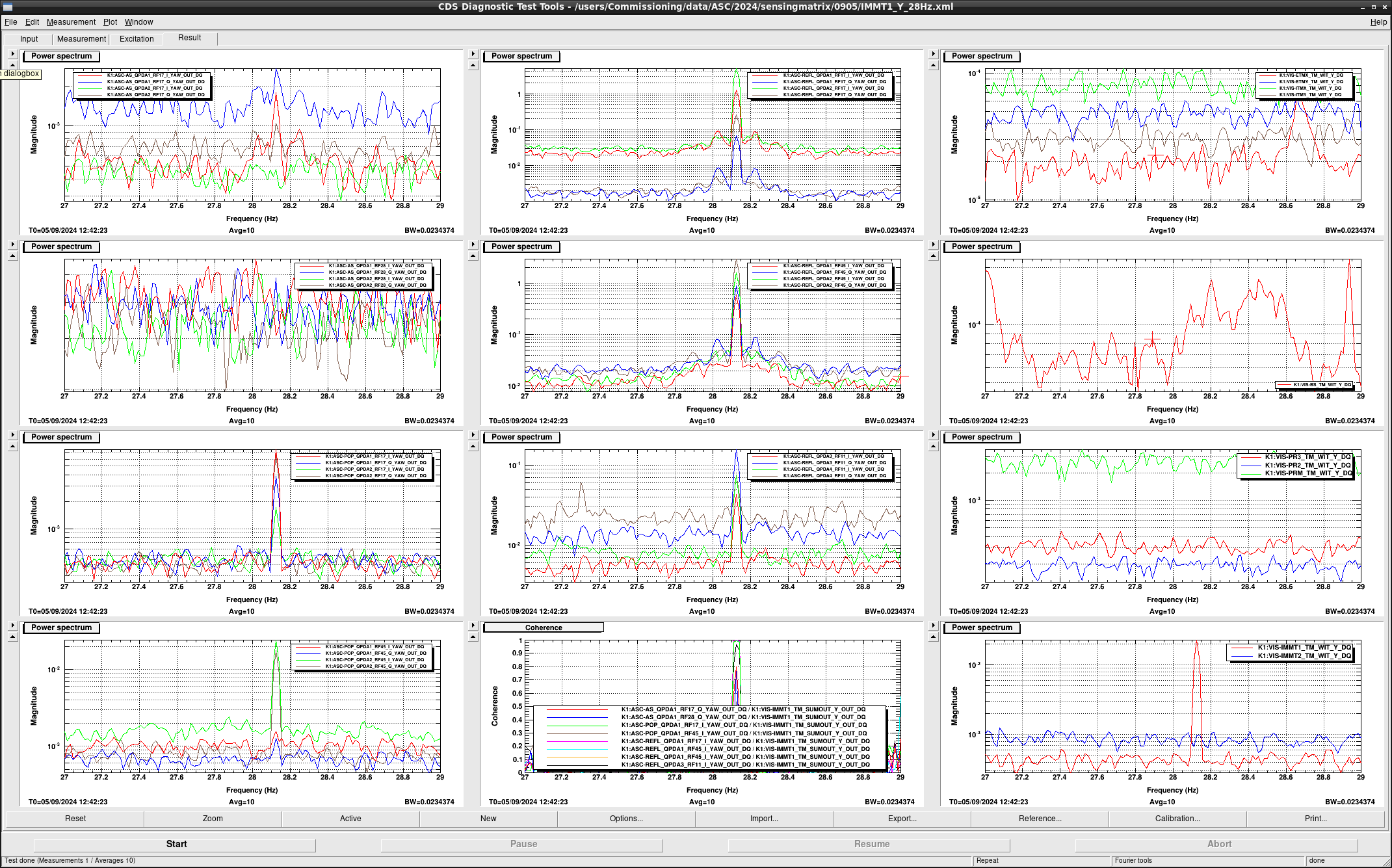
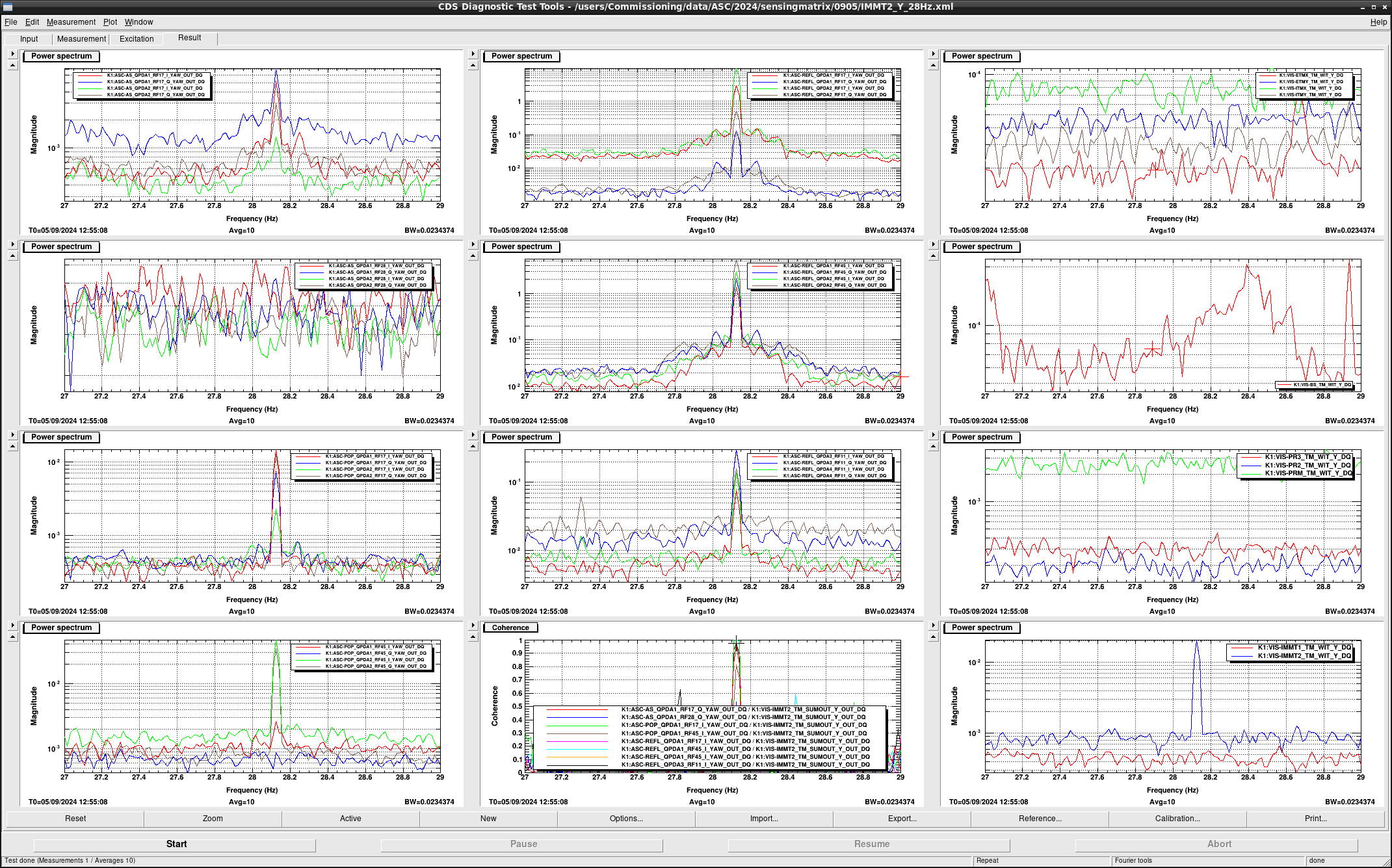
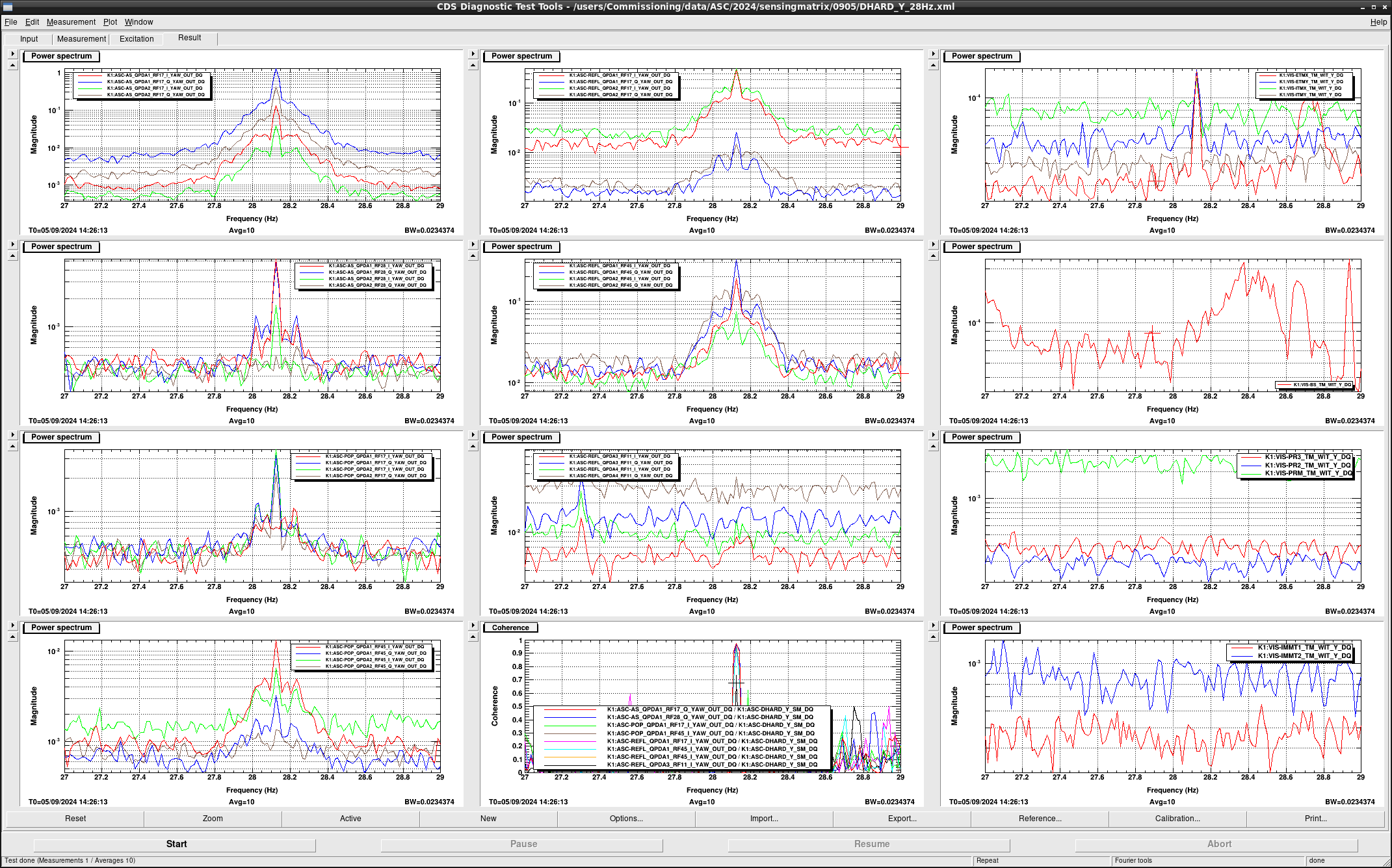
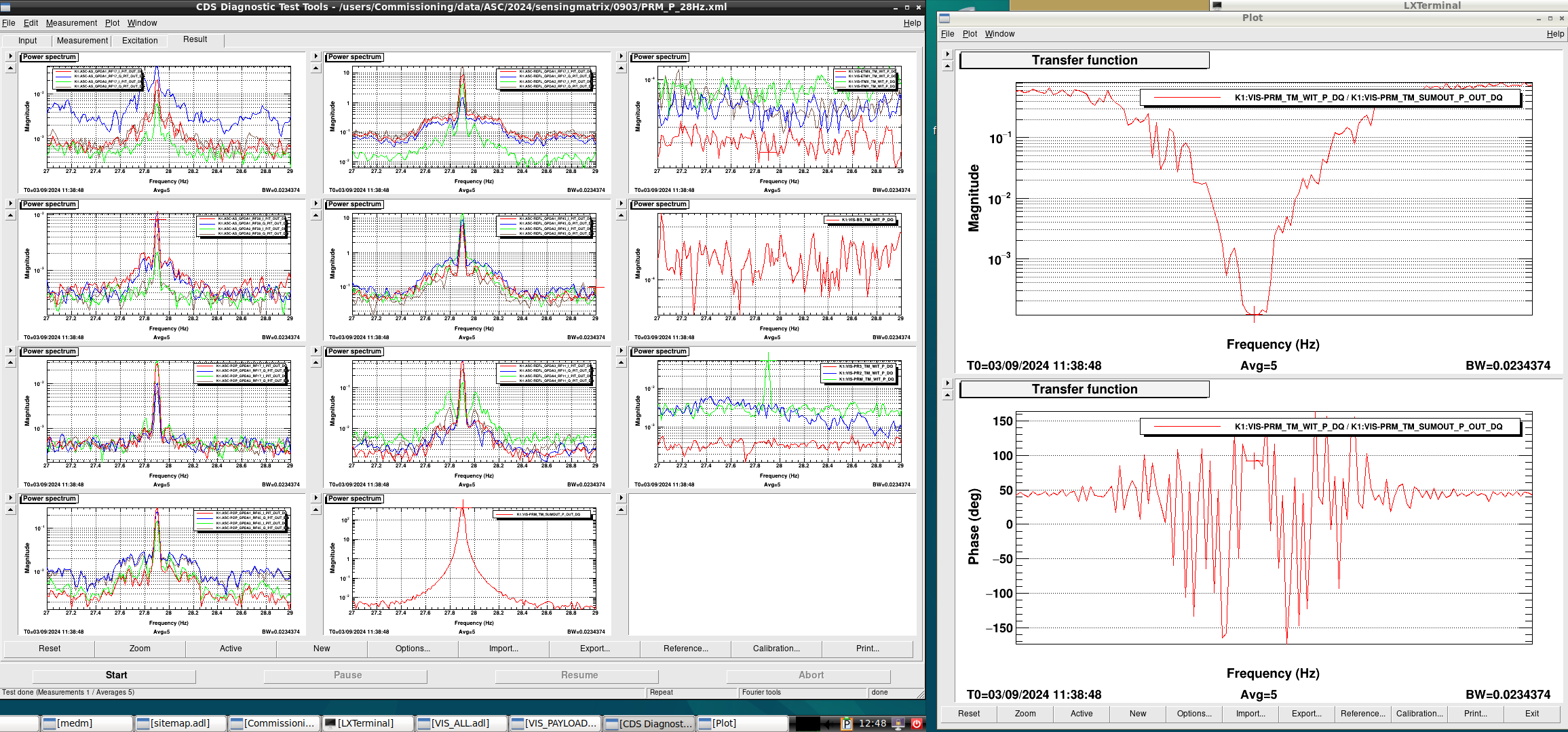
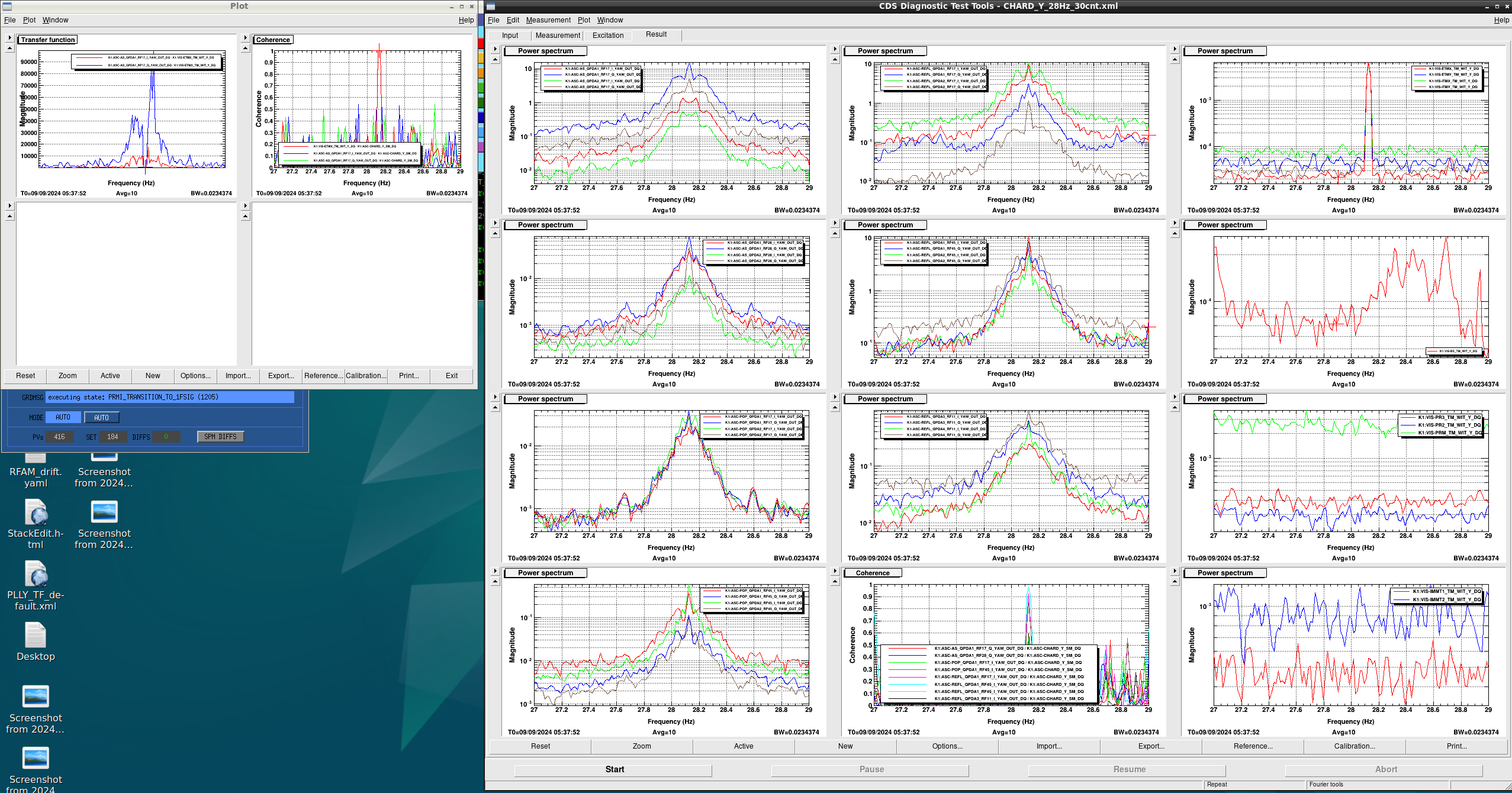
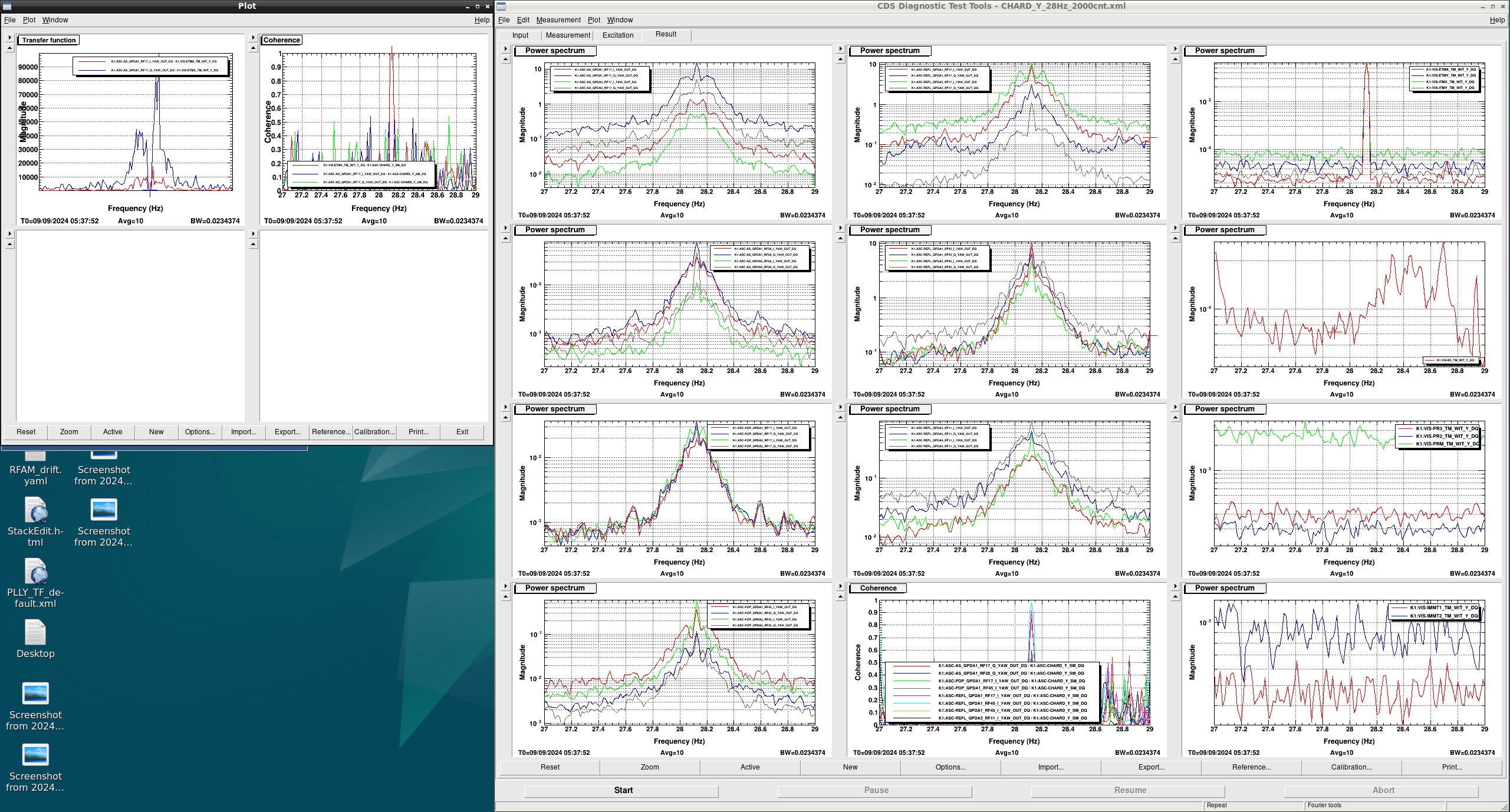
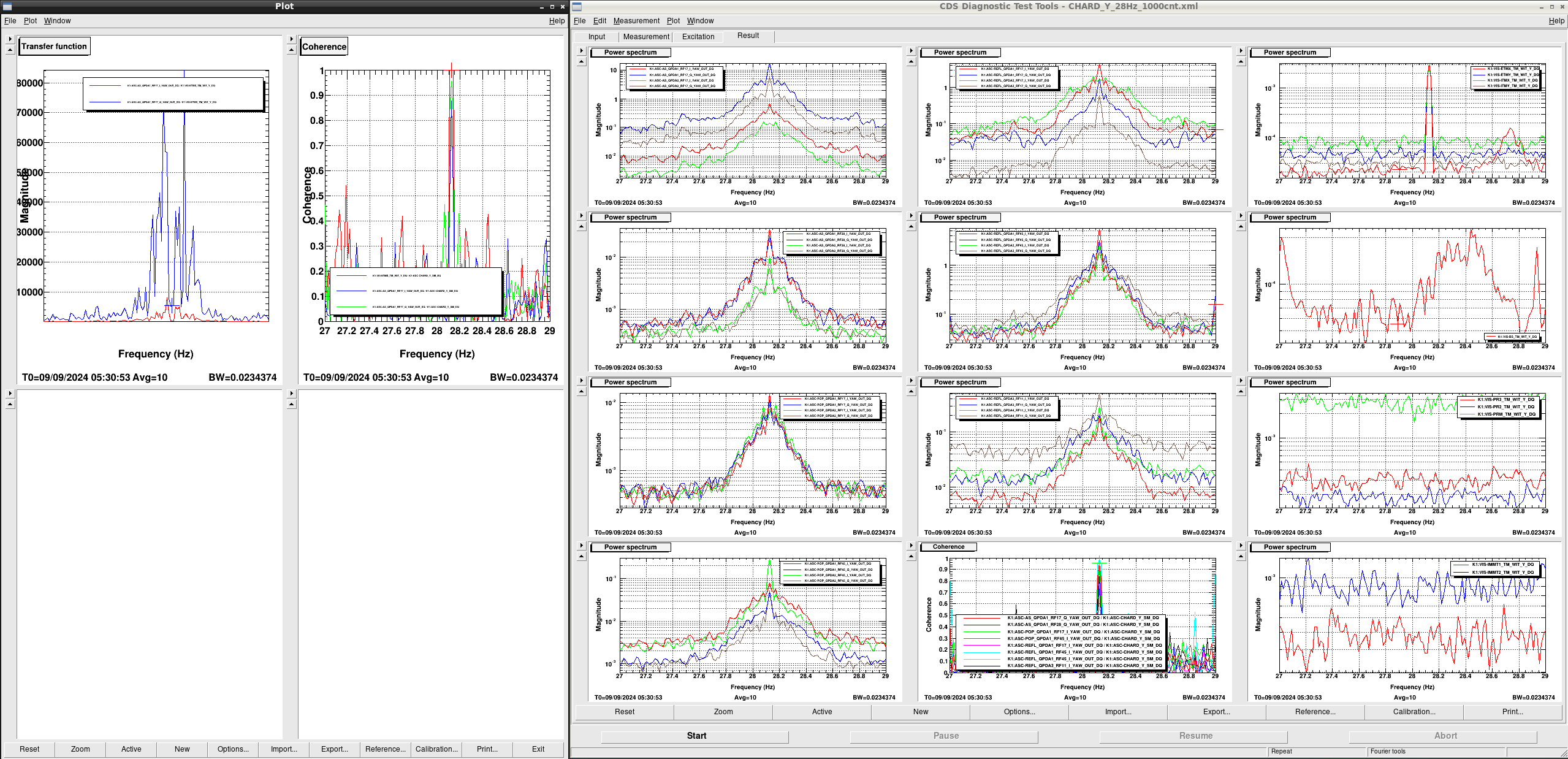
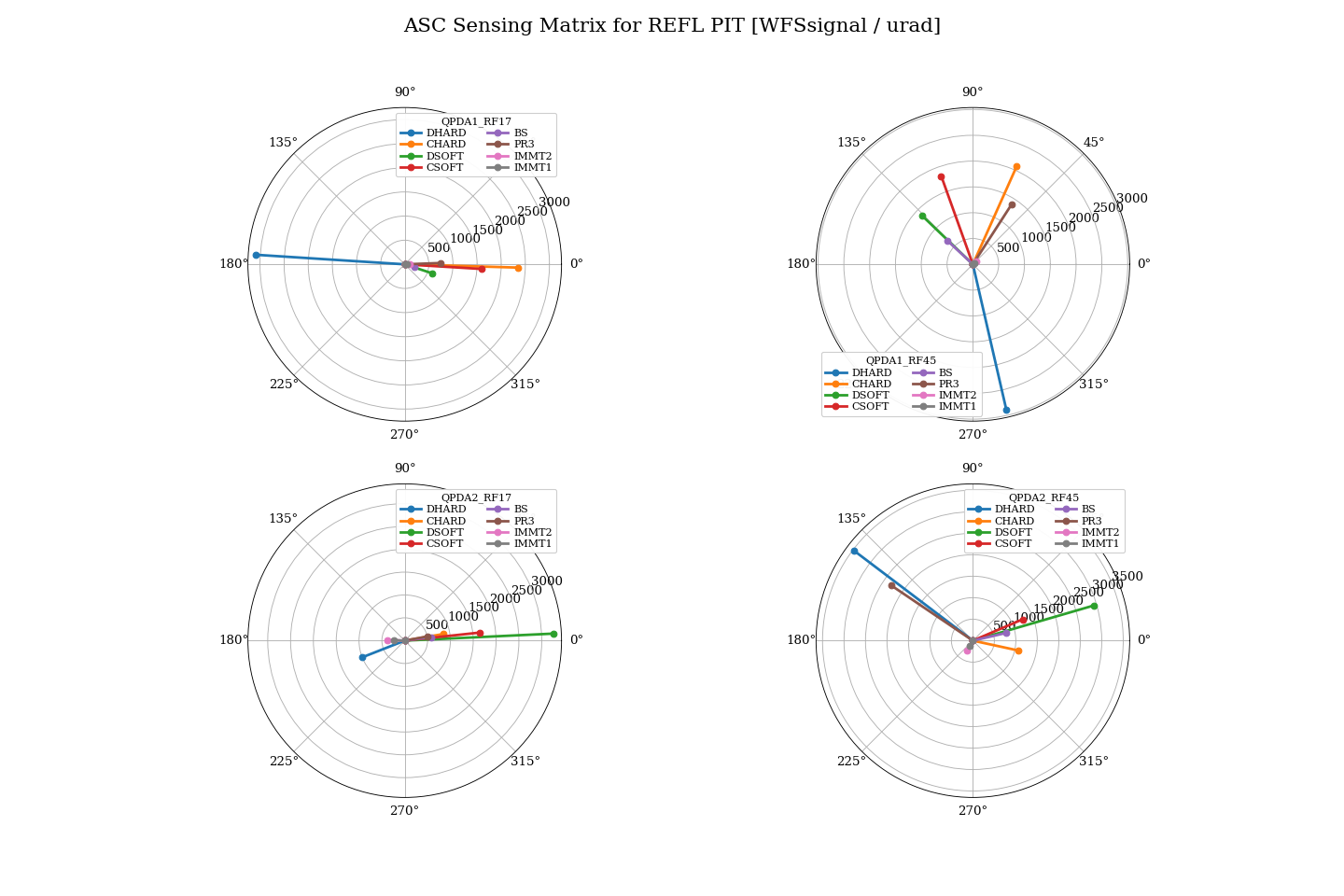
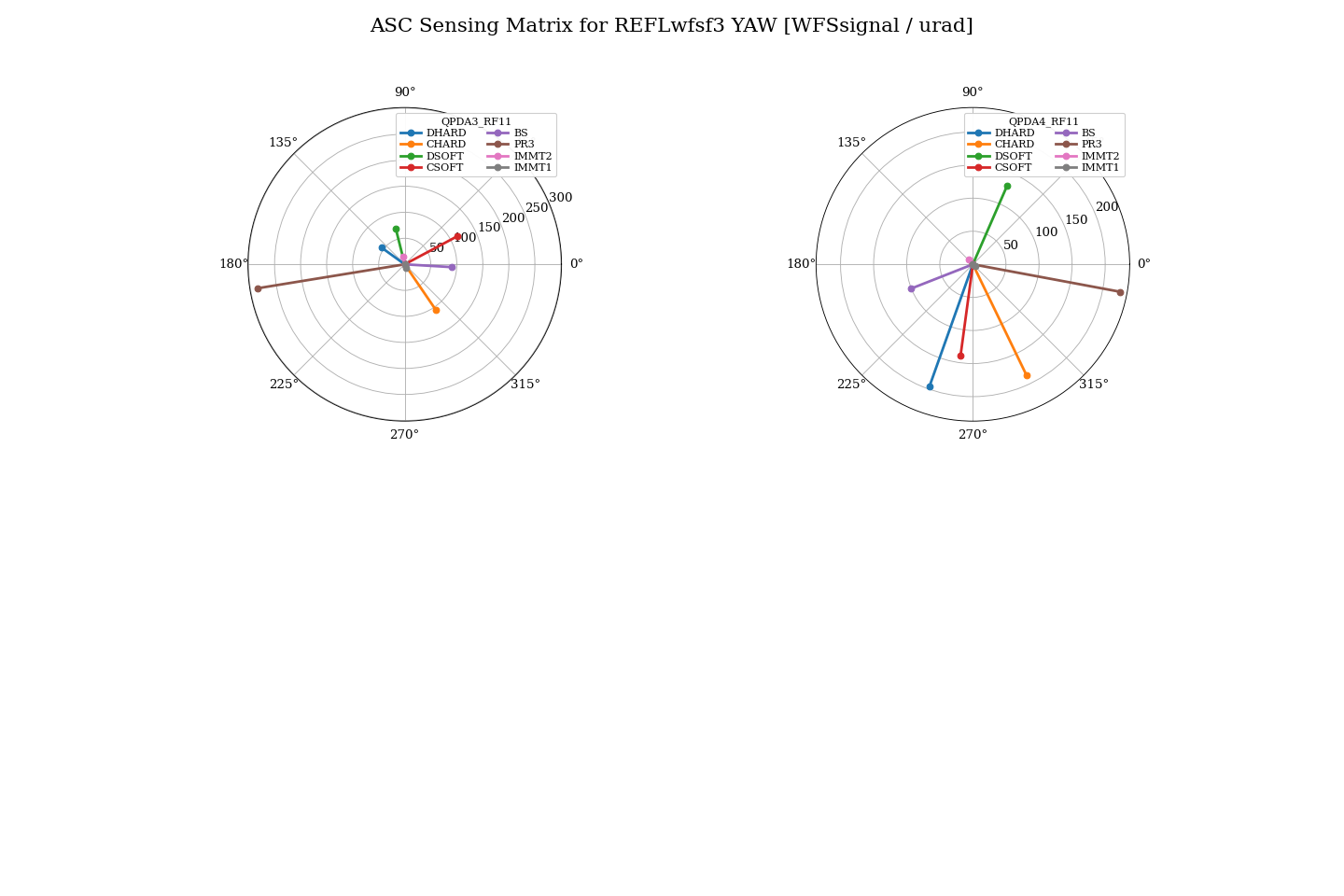
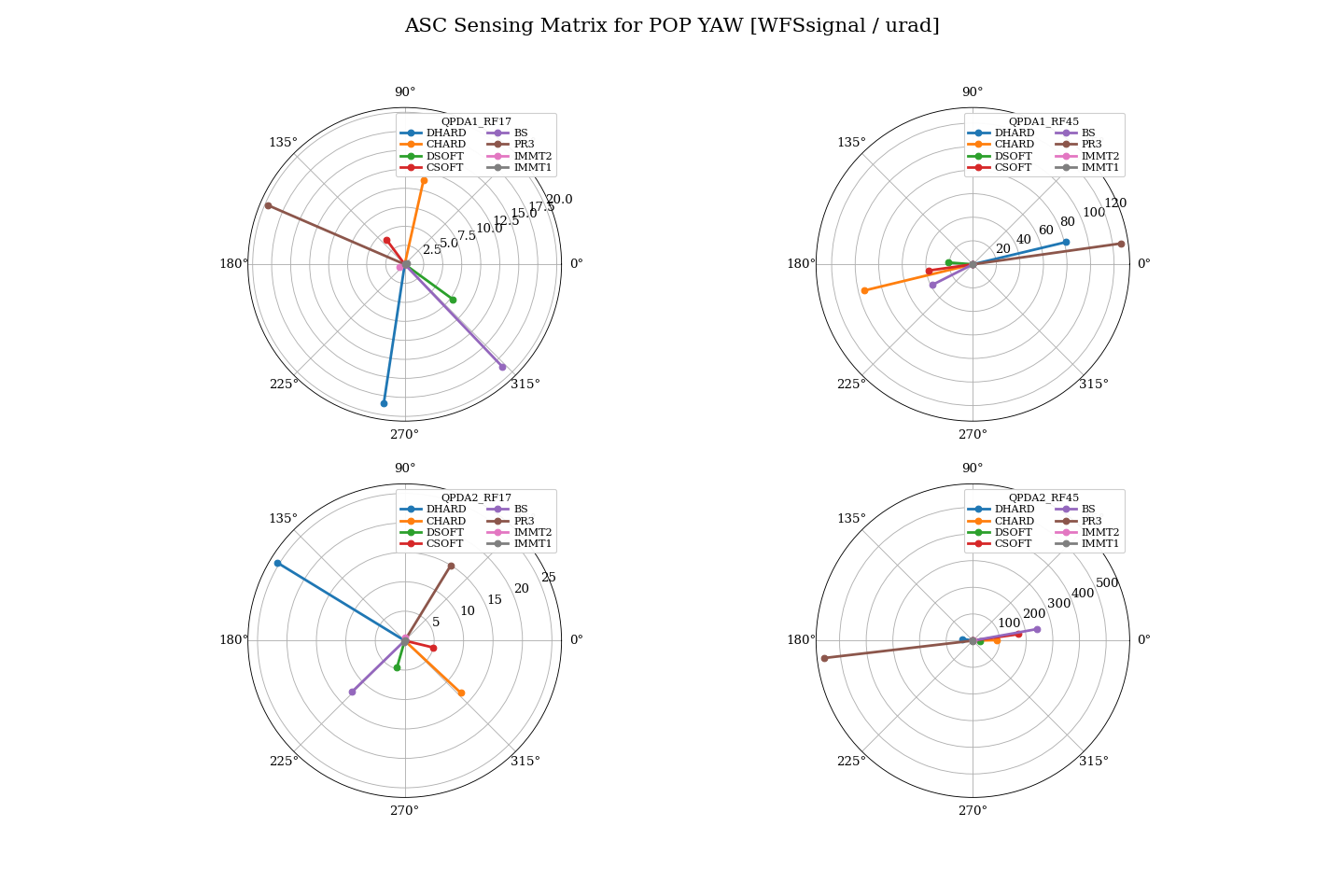
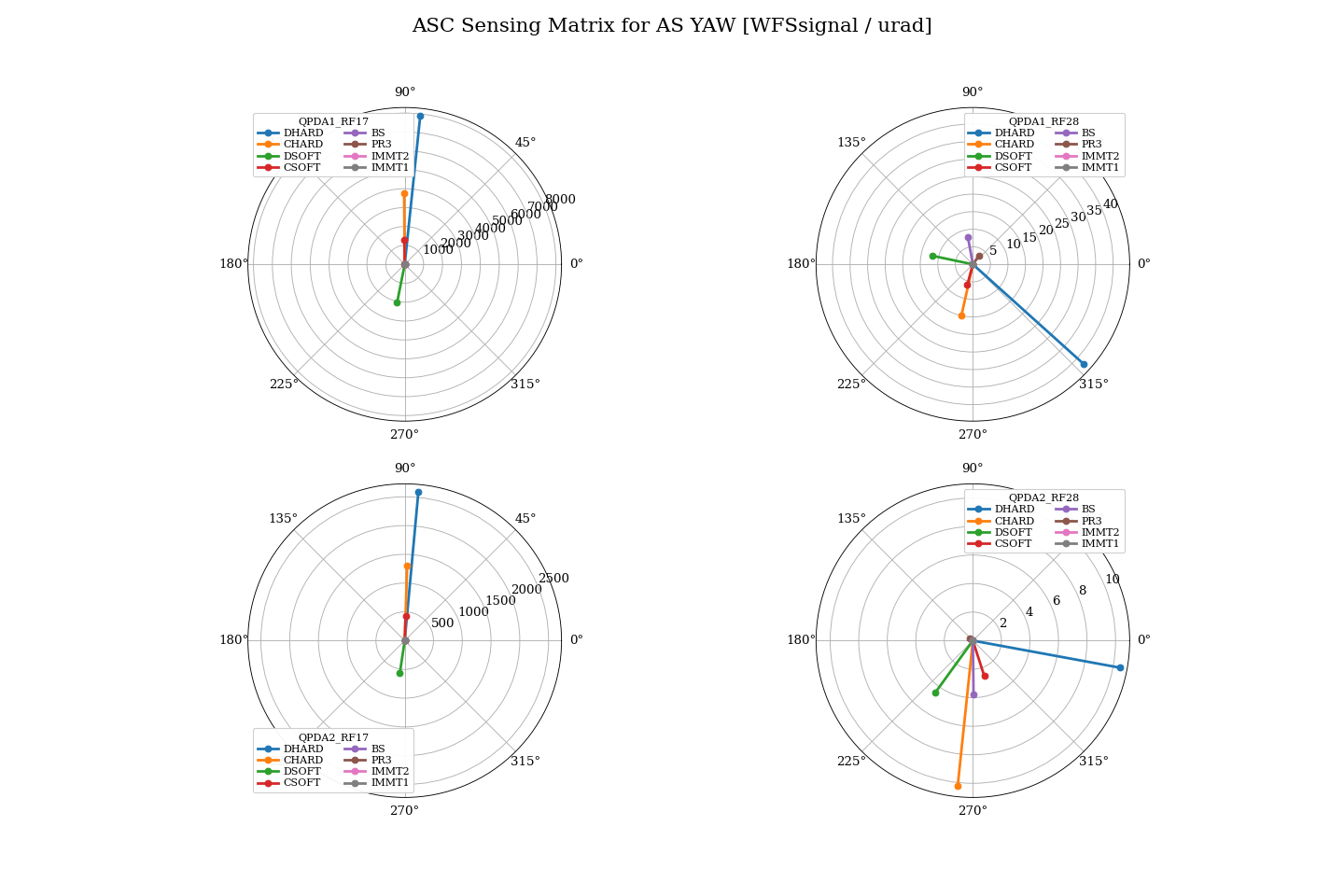
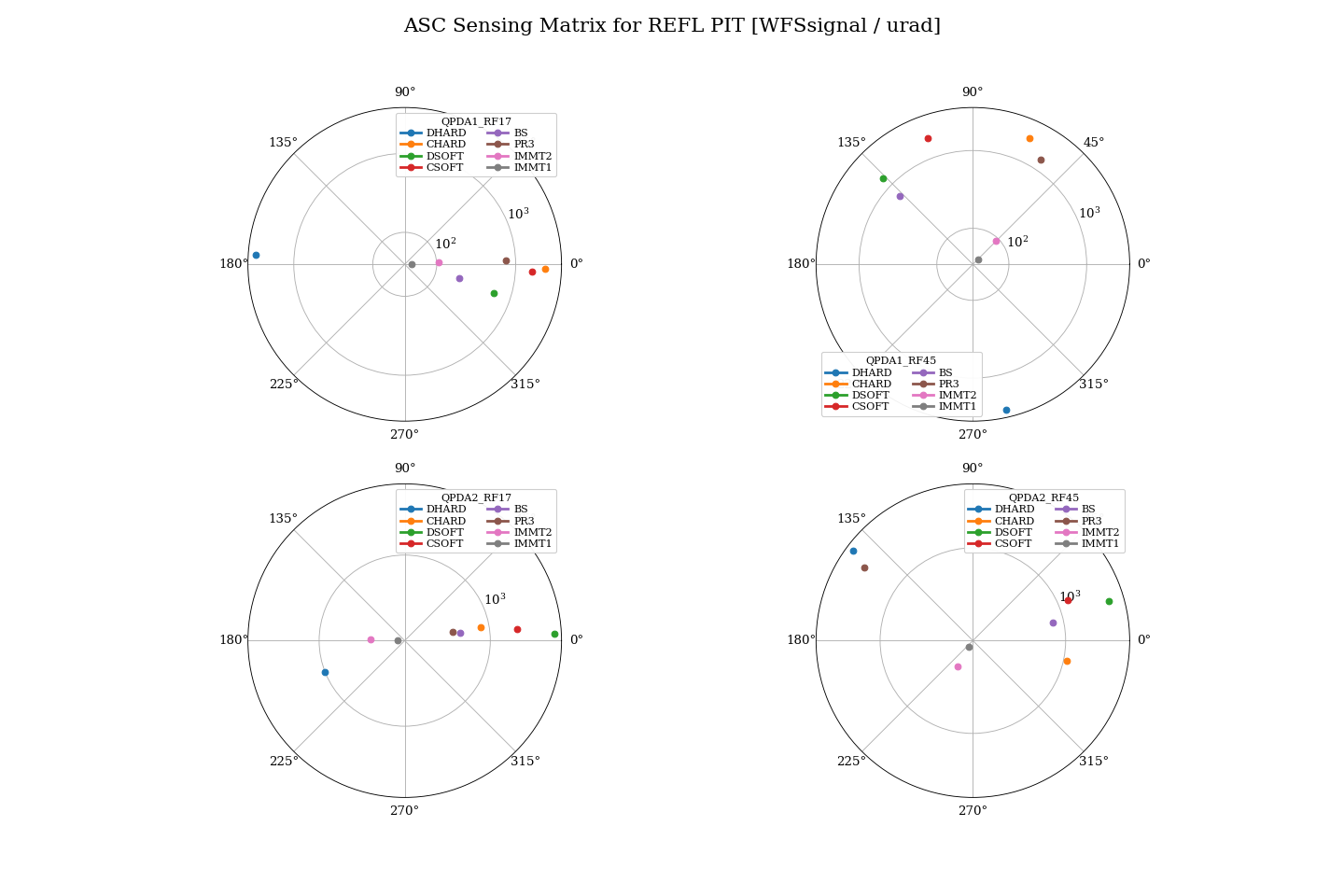
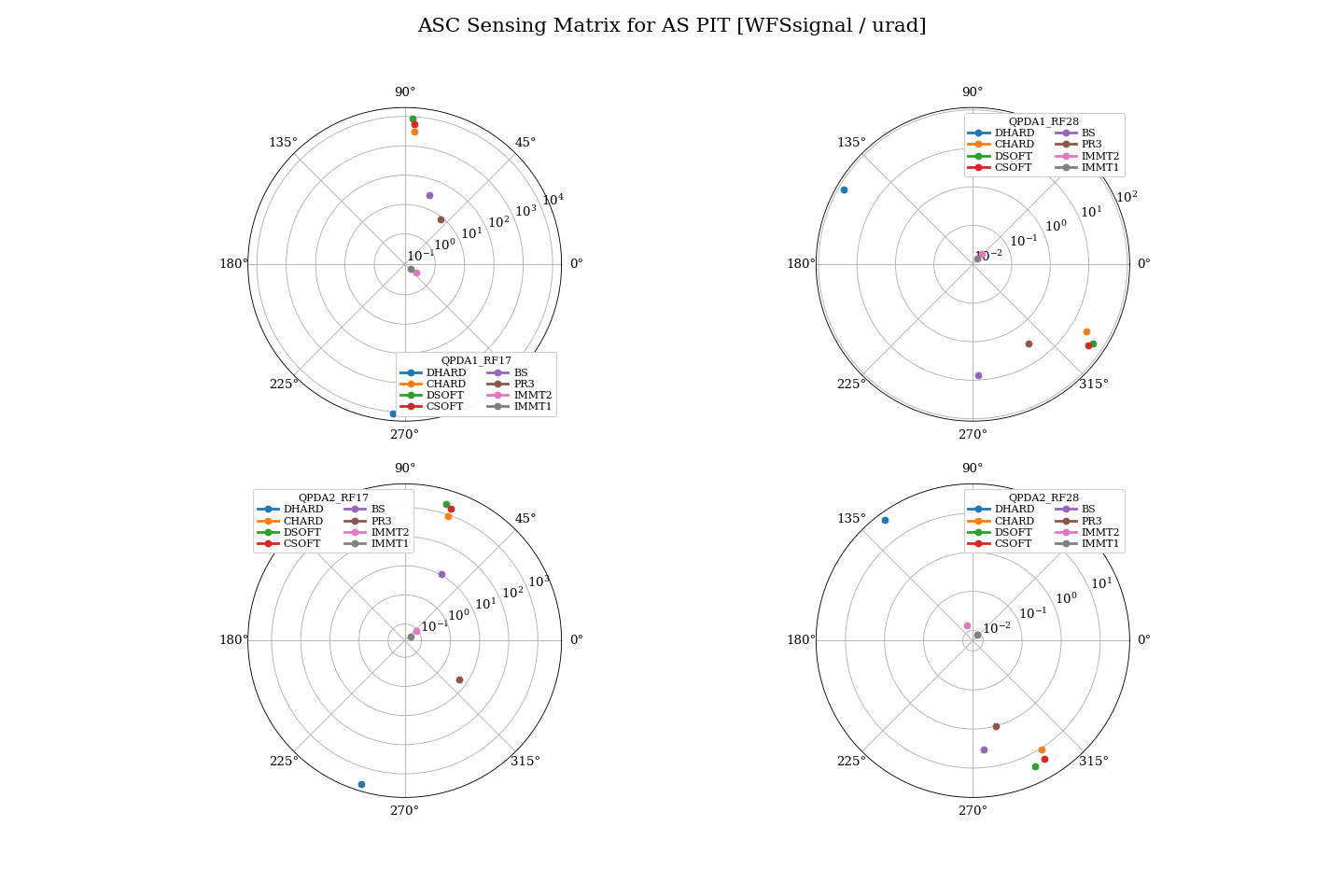
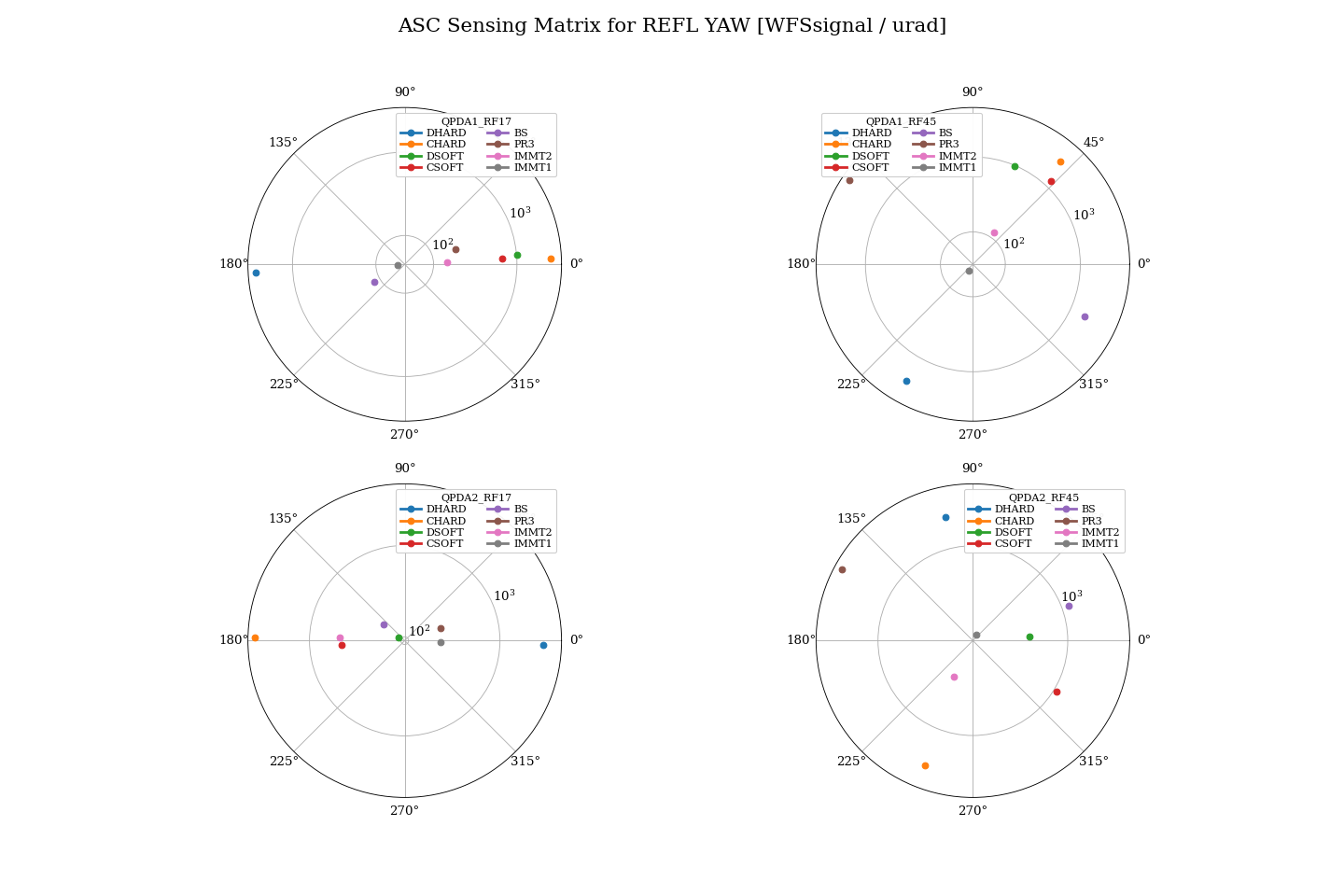
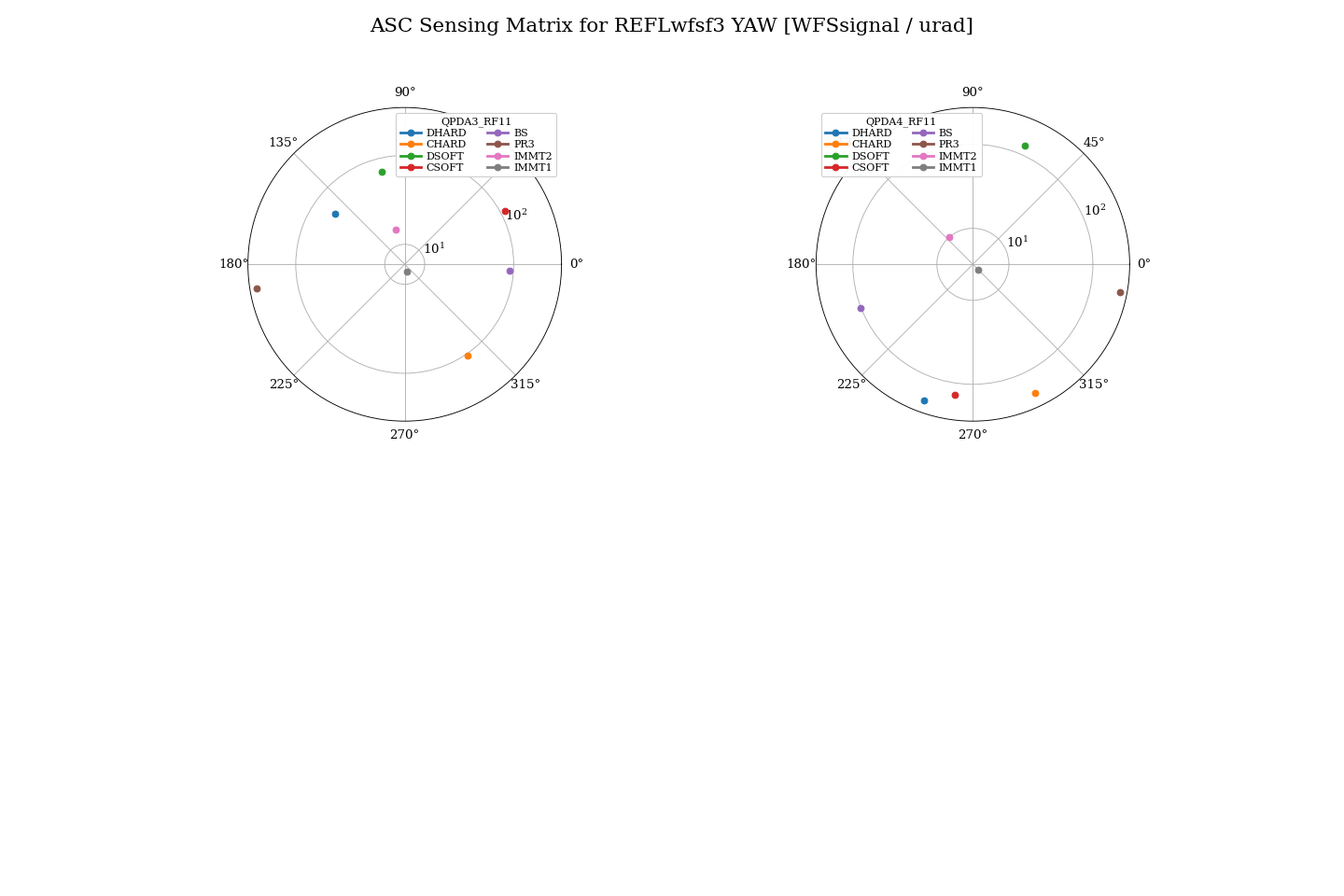
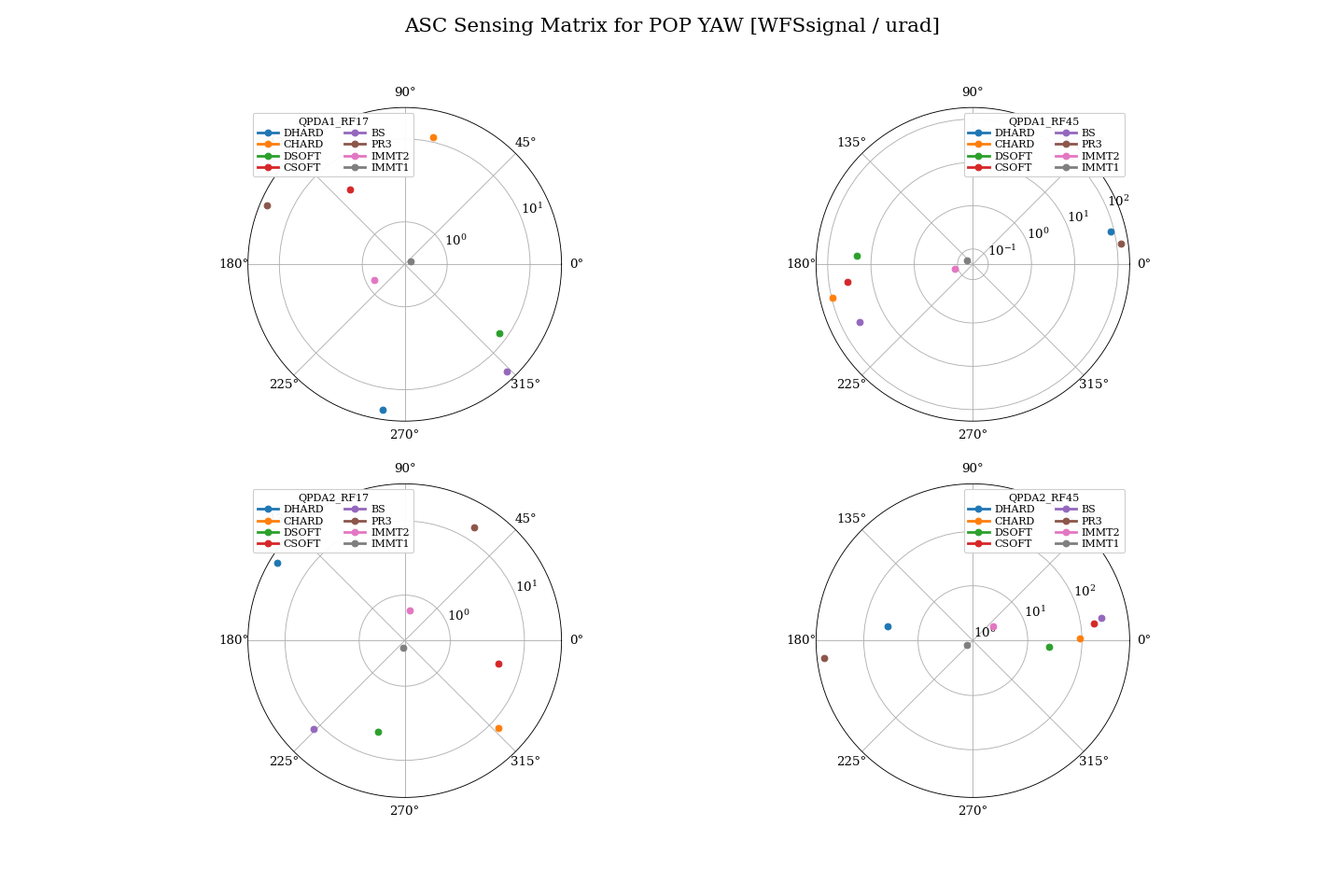
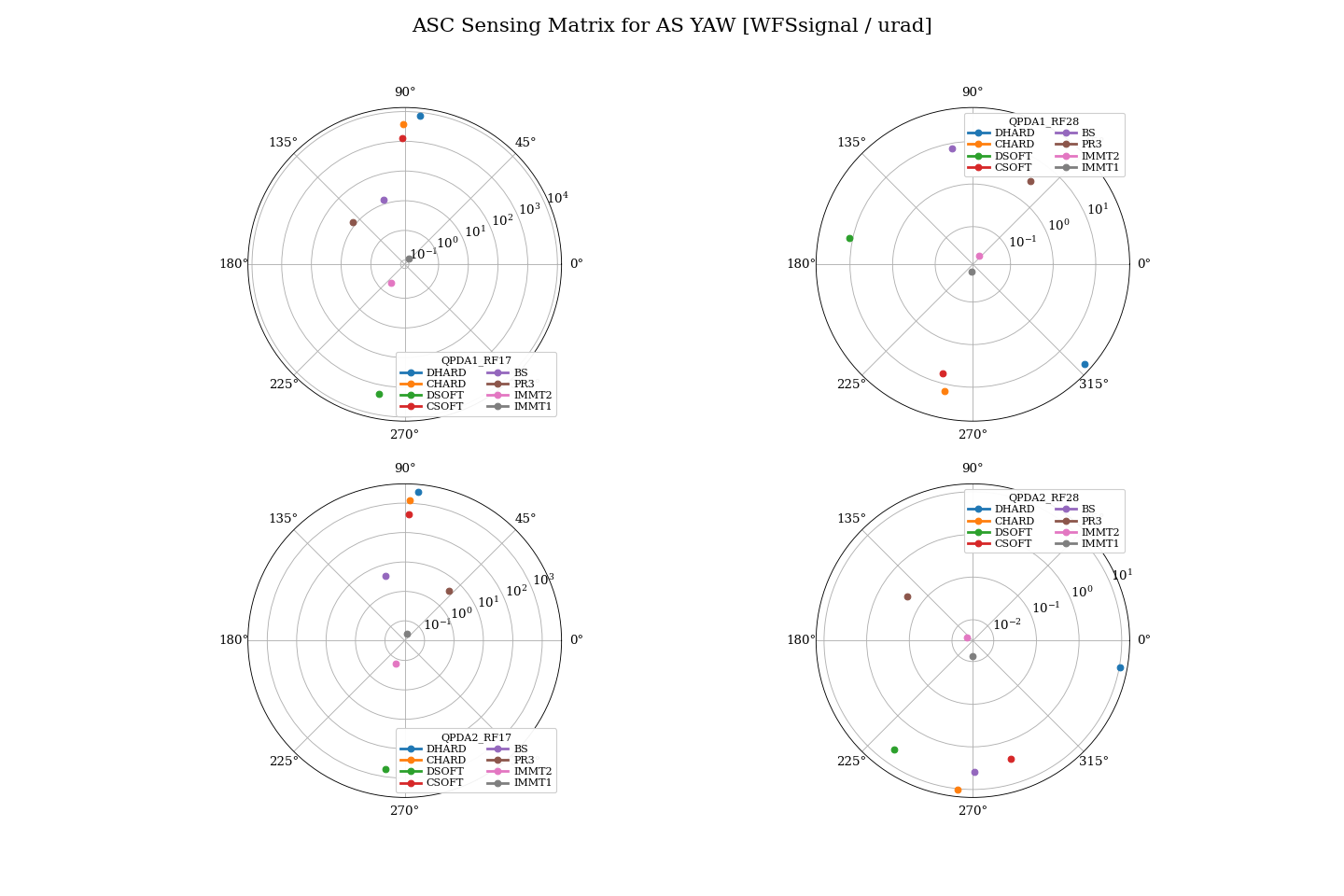
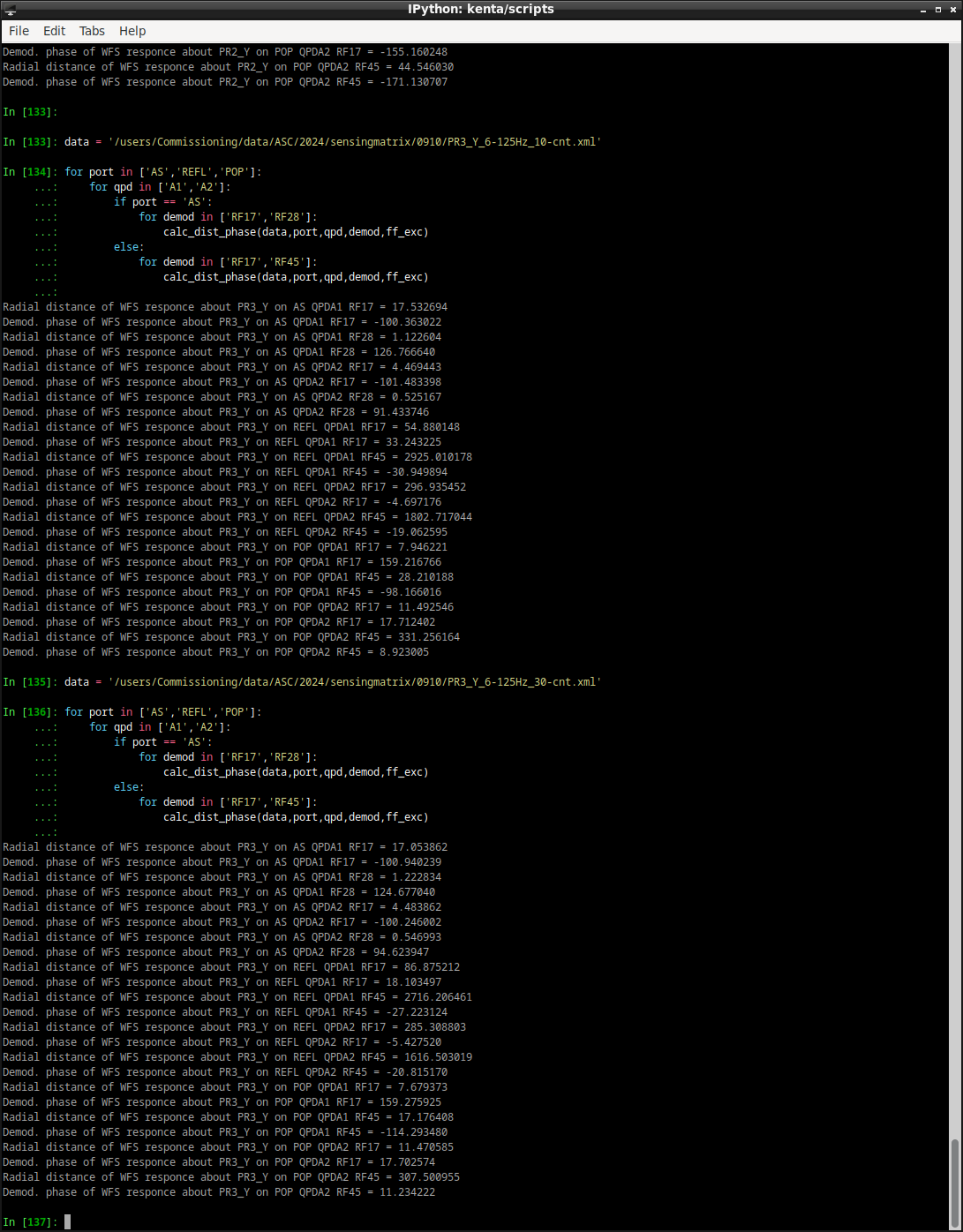
We measured the sensing information again with new injection frequencies.
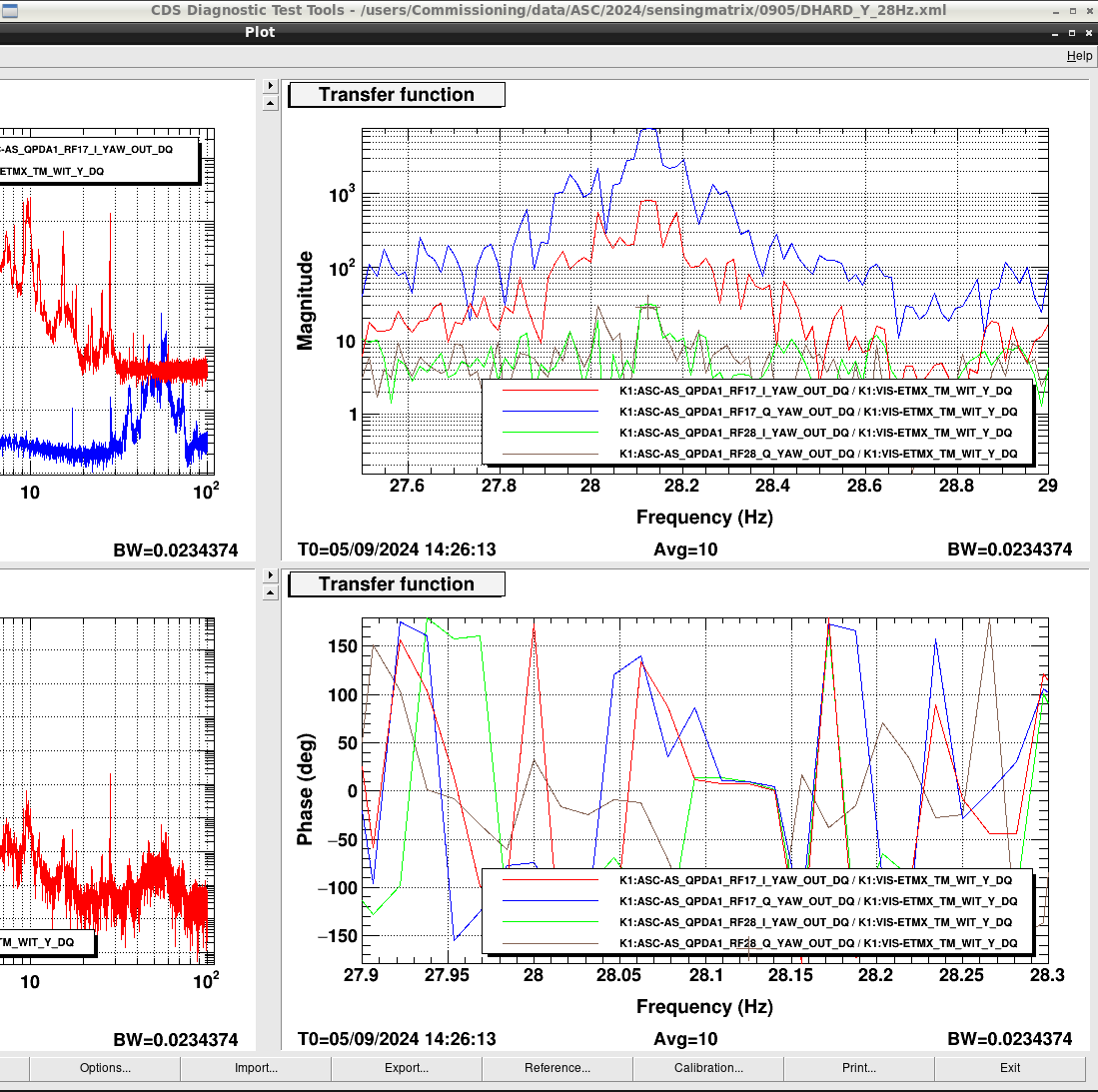
This is because the linearity and reproductivity of the result were not good with 28.125Hz we used before as reported.
We used 12.125Hz for pitch and 6.125Hz for yaw. (We have checked that there is not any peak on the suspension TFs.)
Due to conflicts with other work, we were unable to complete all measurements.
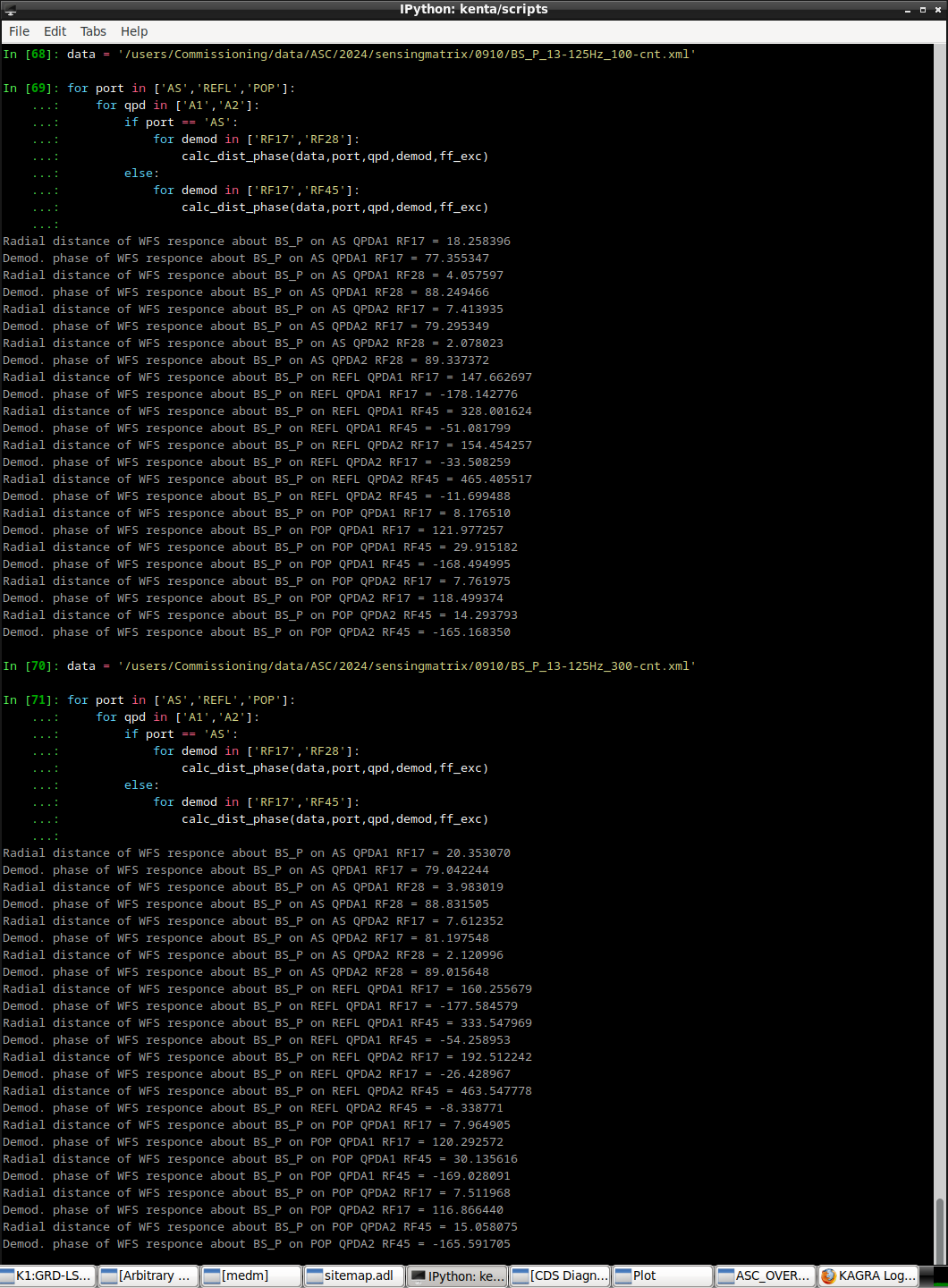
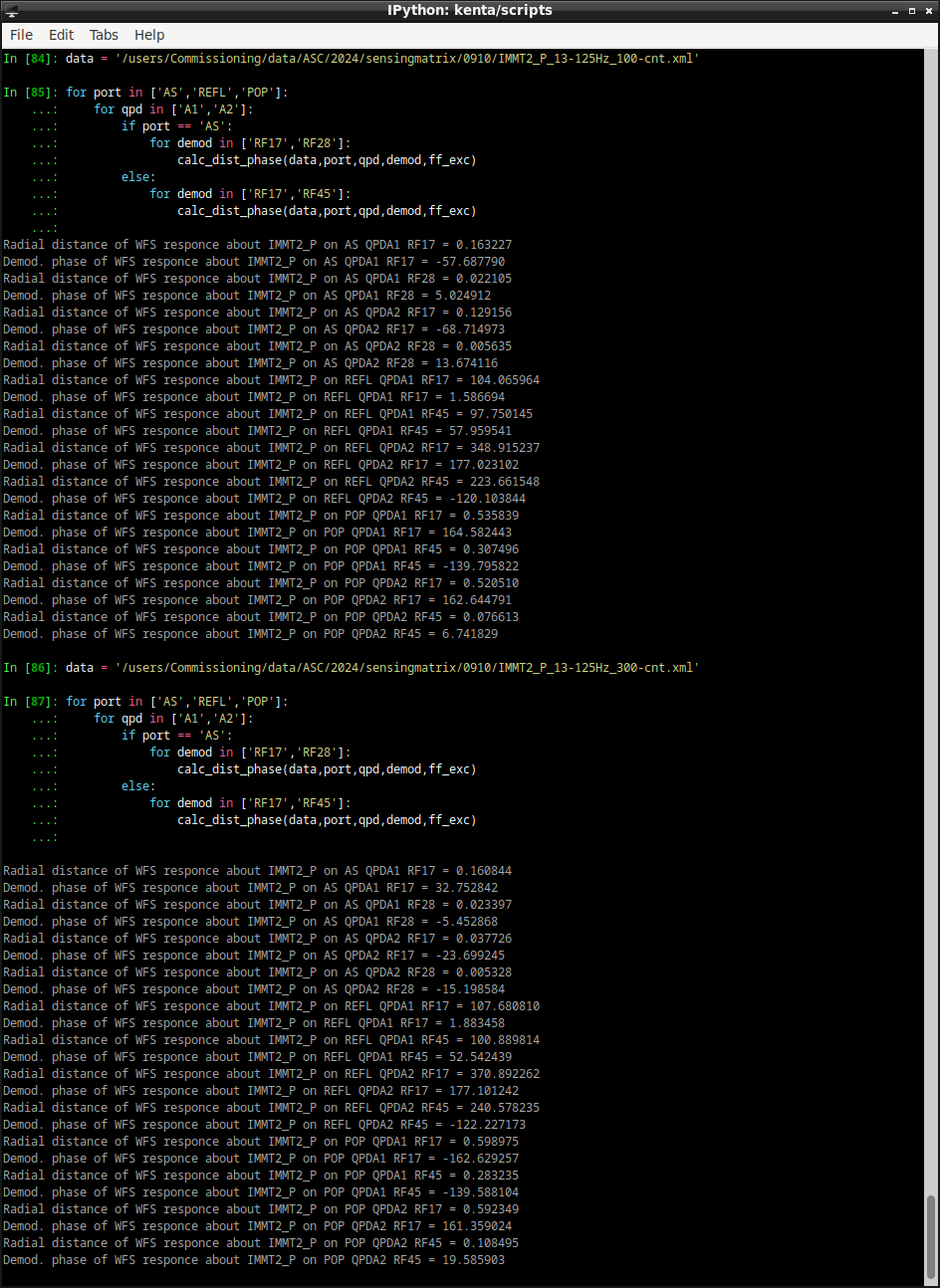
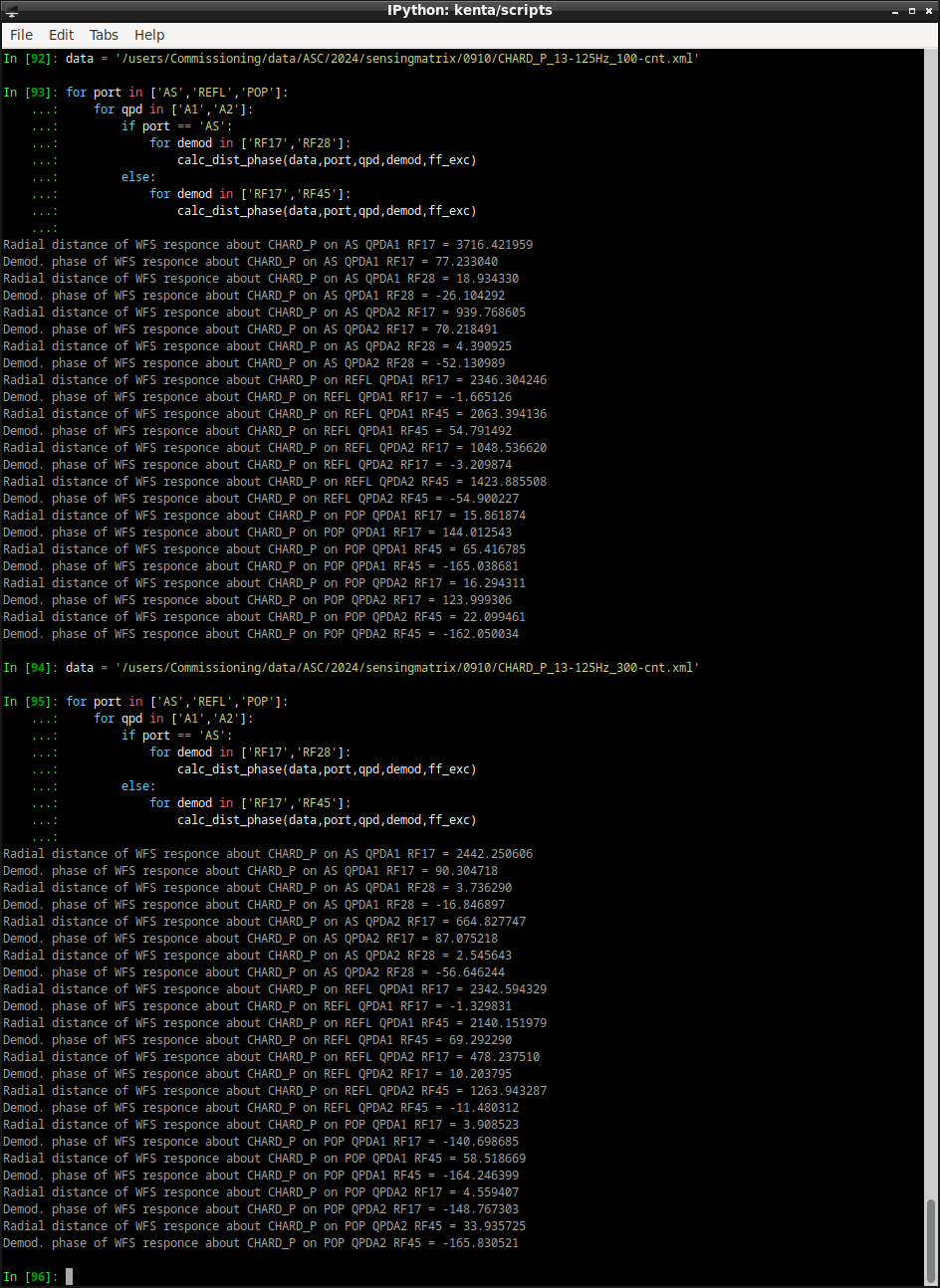
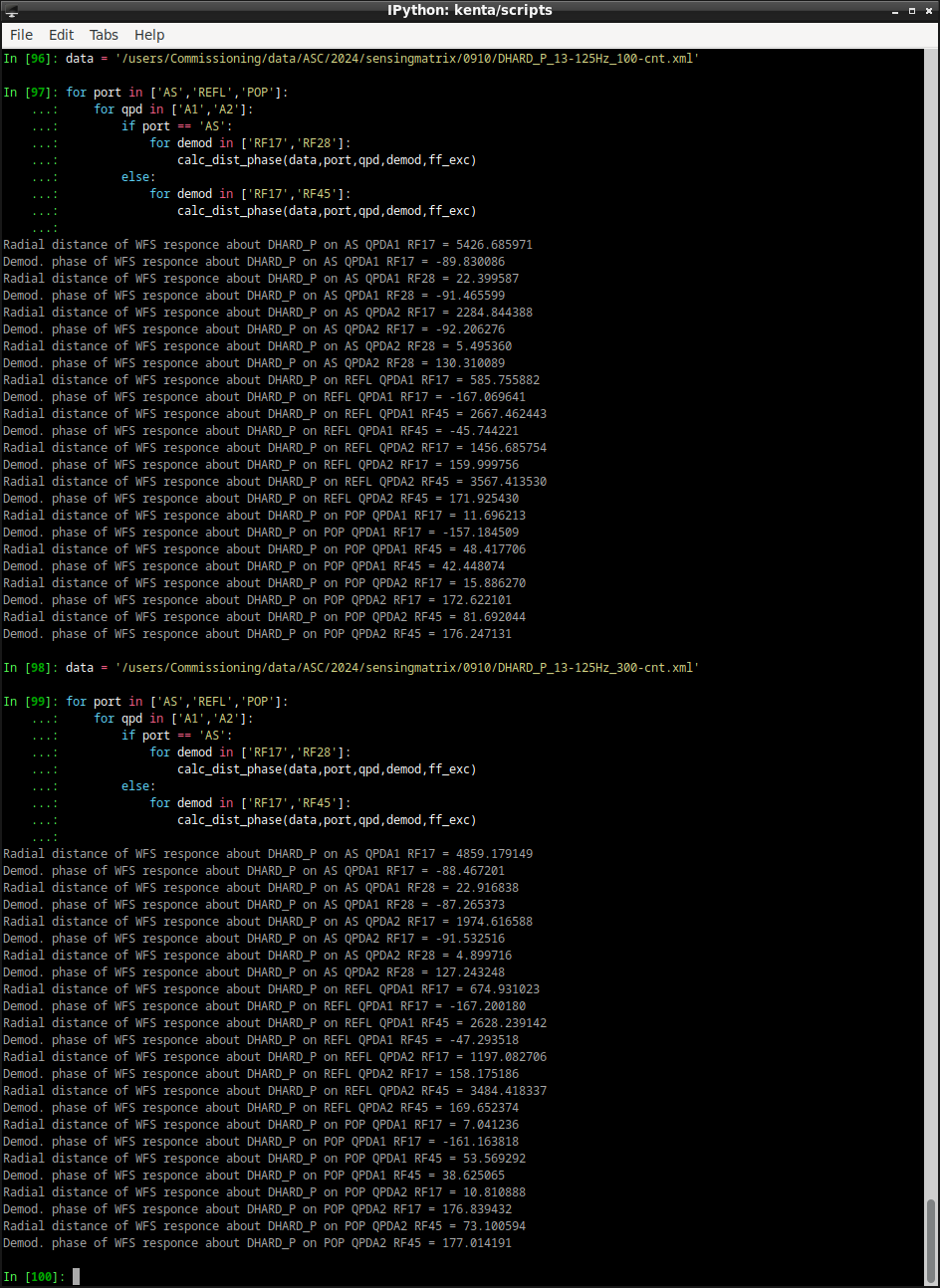
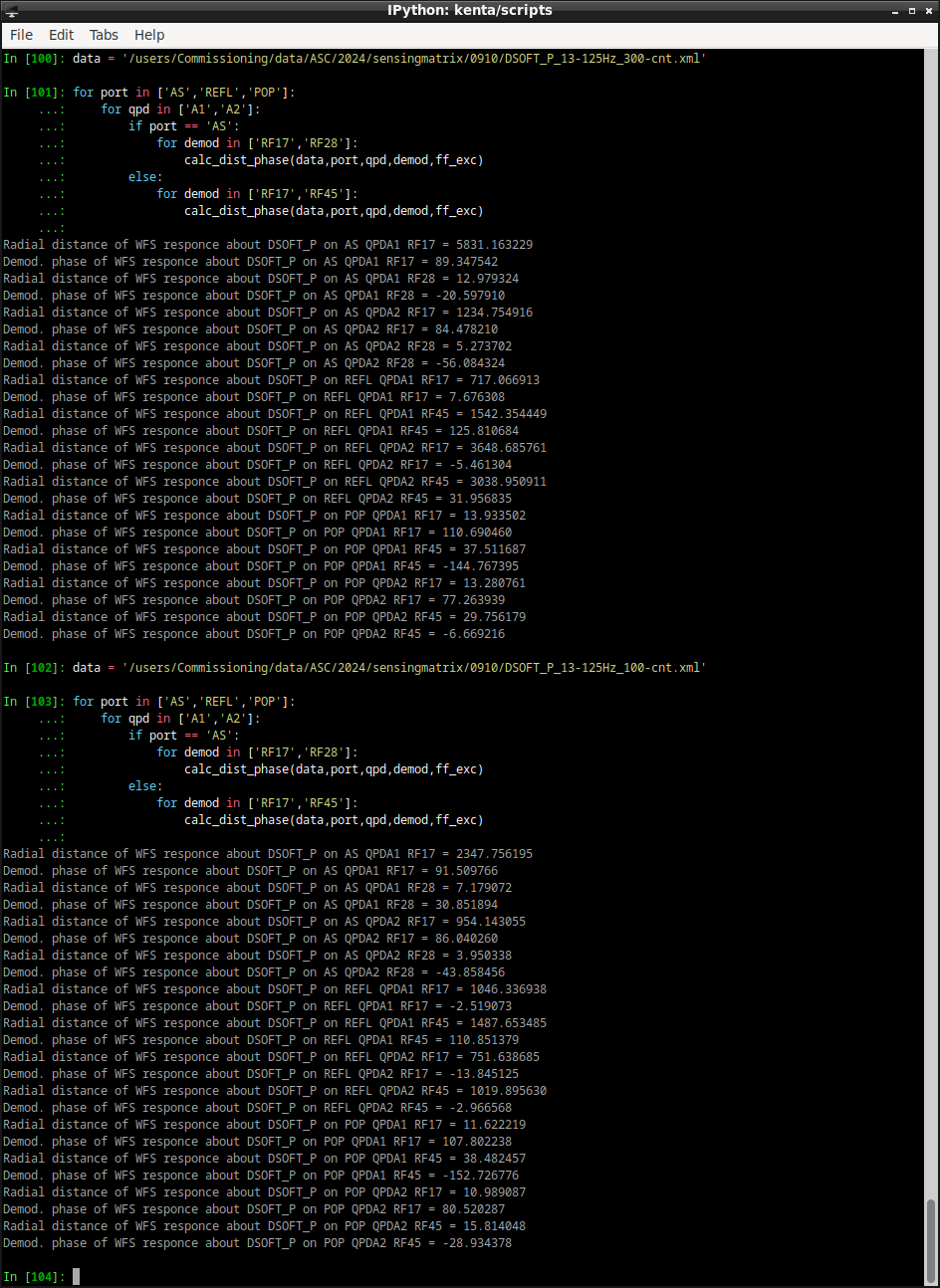
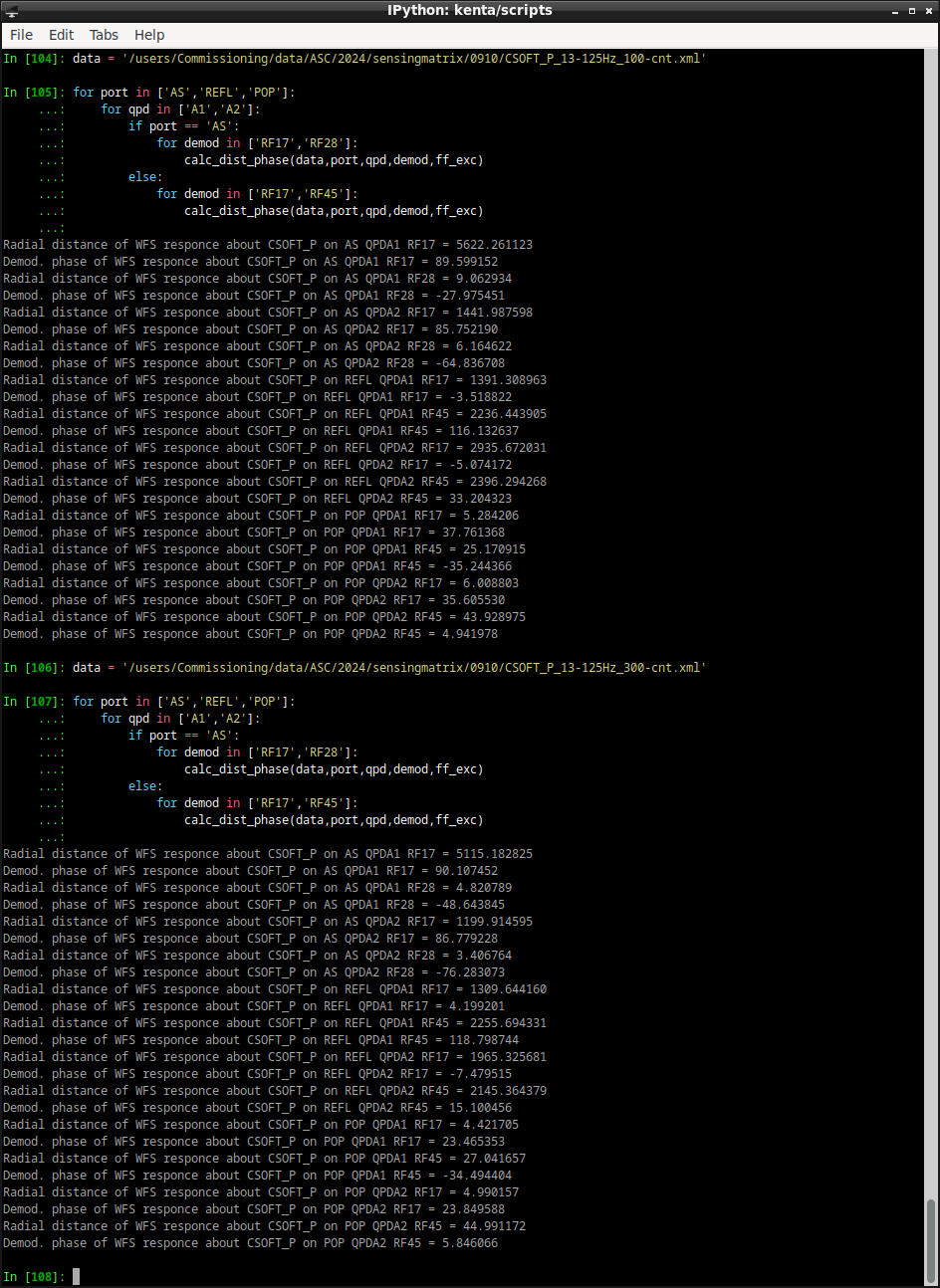
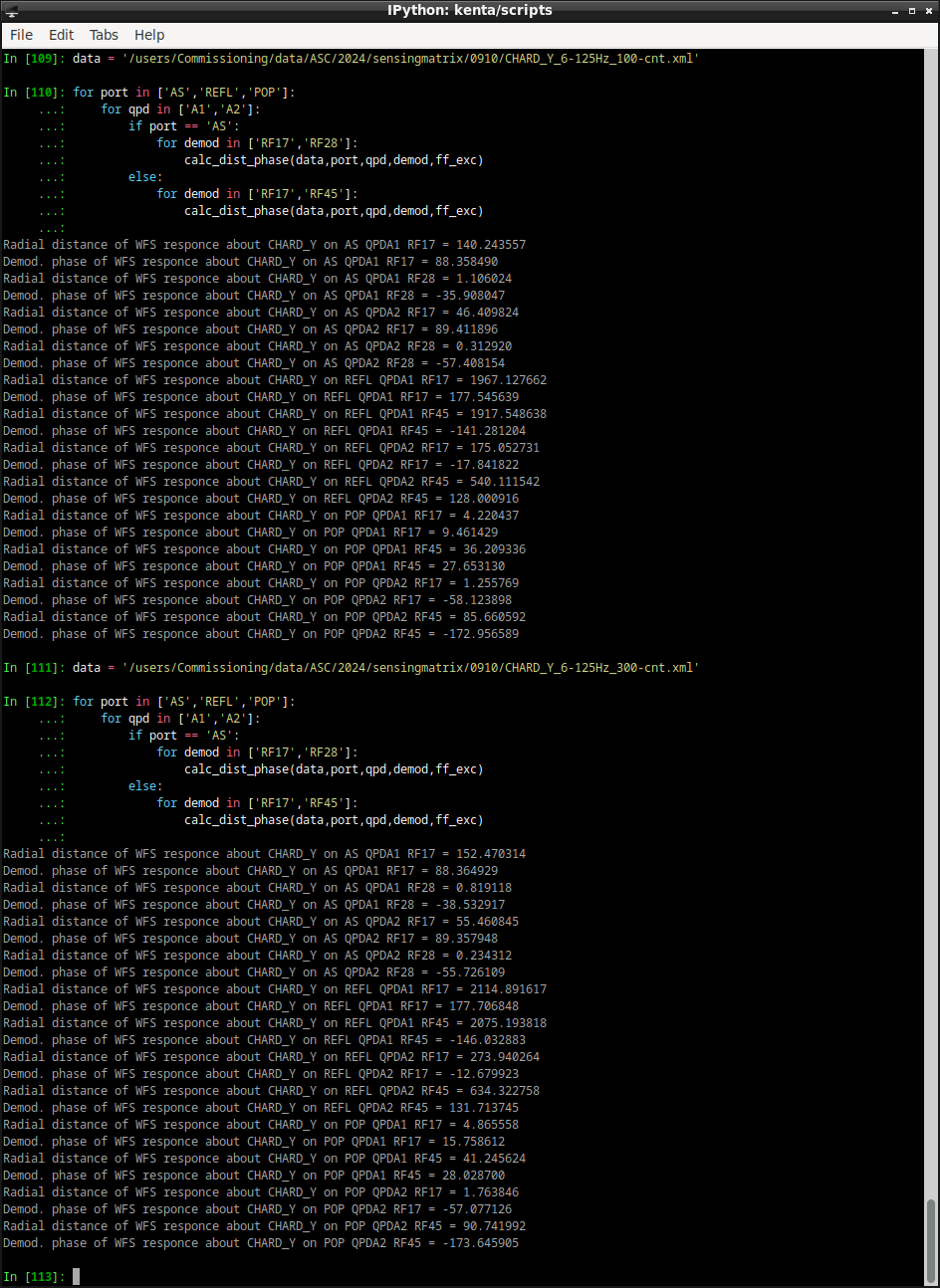
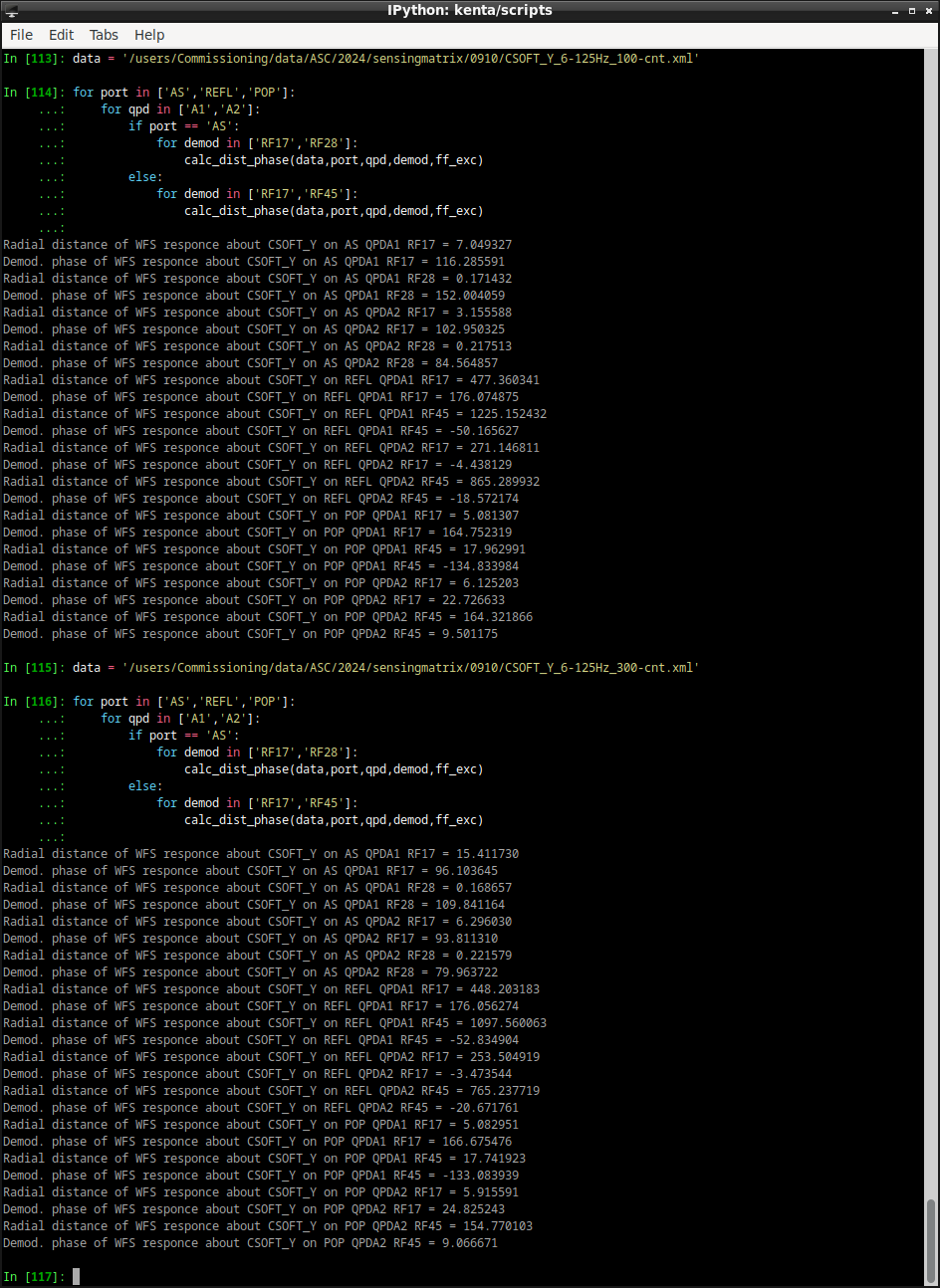
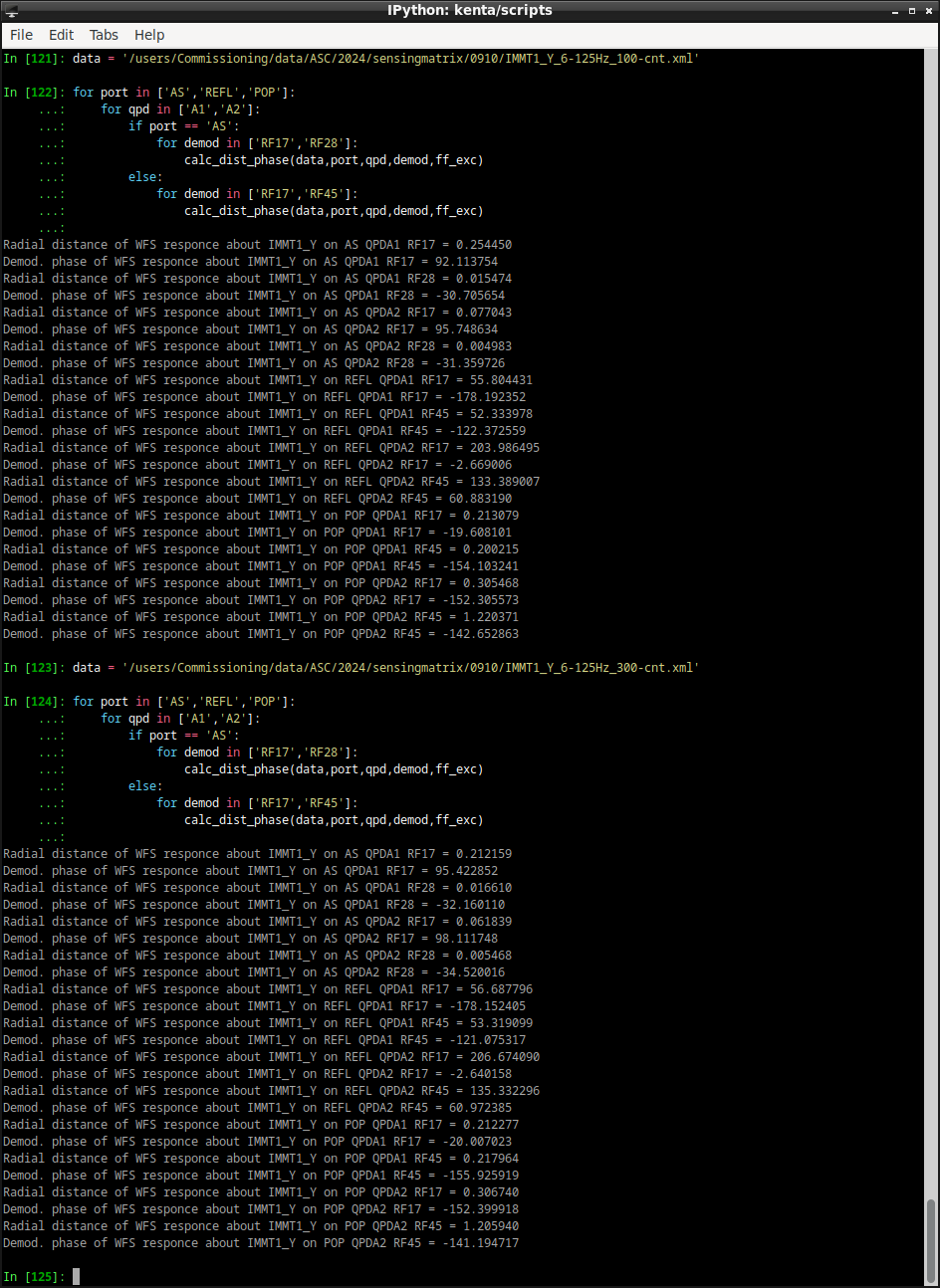
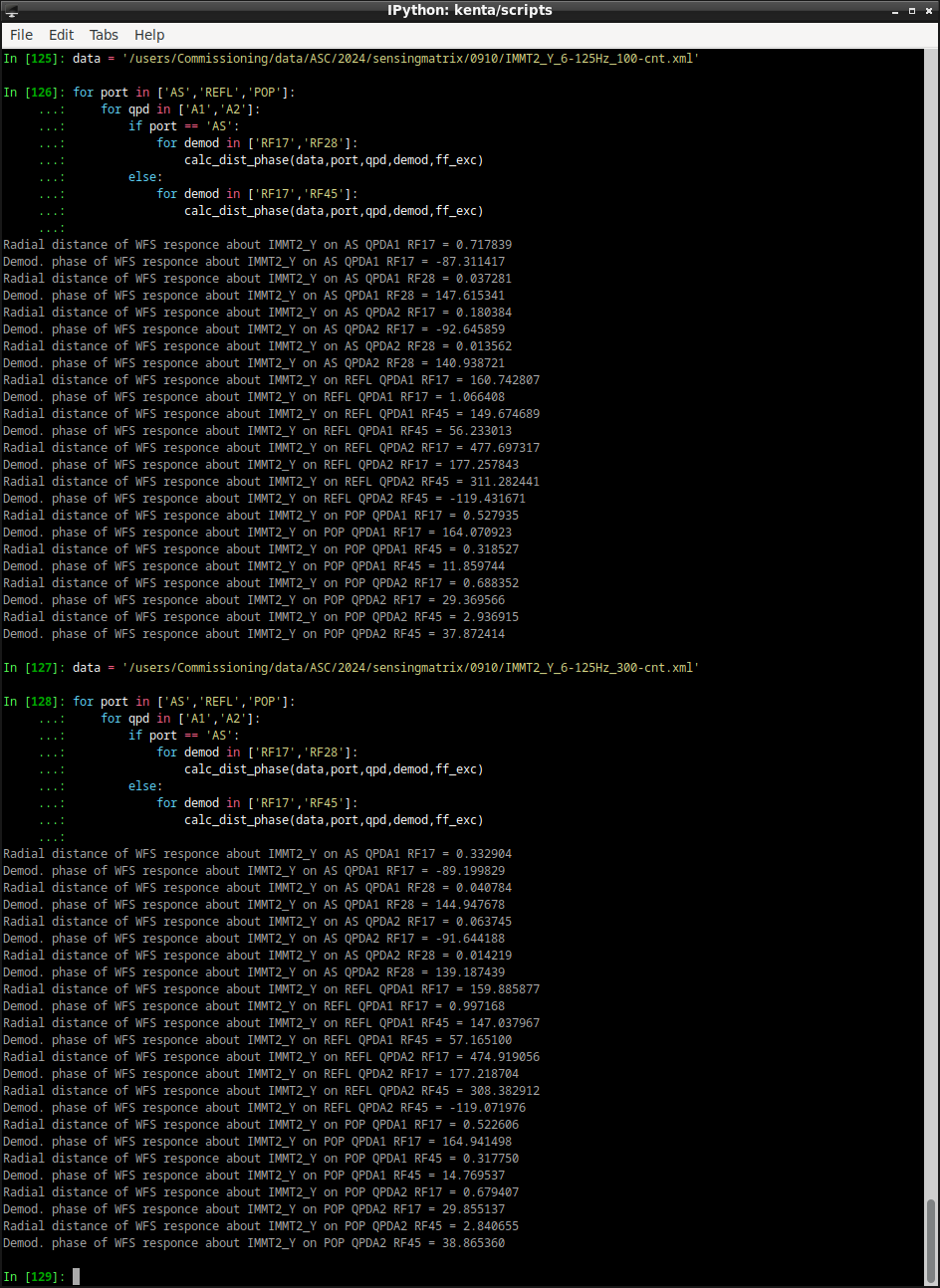
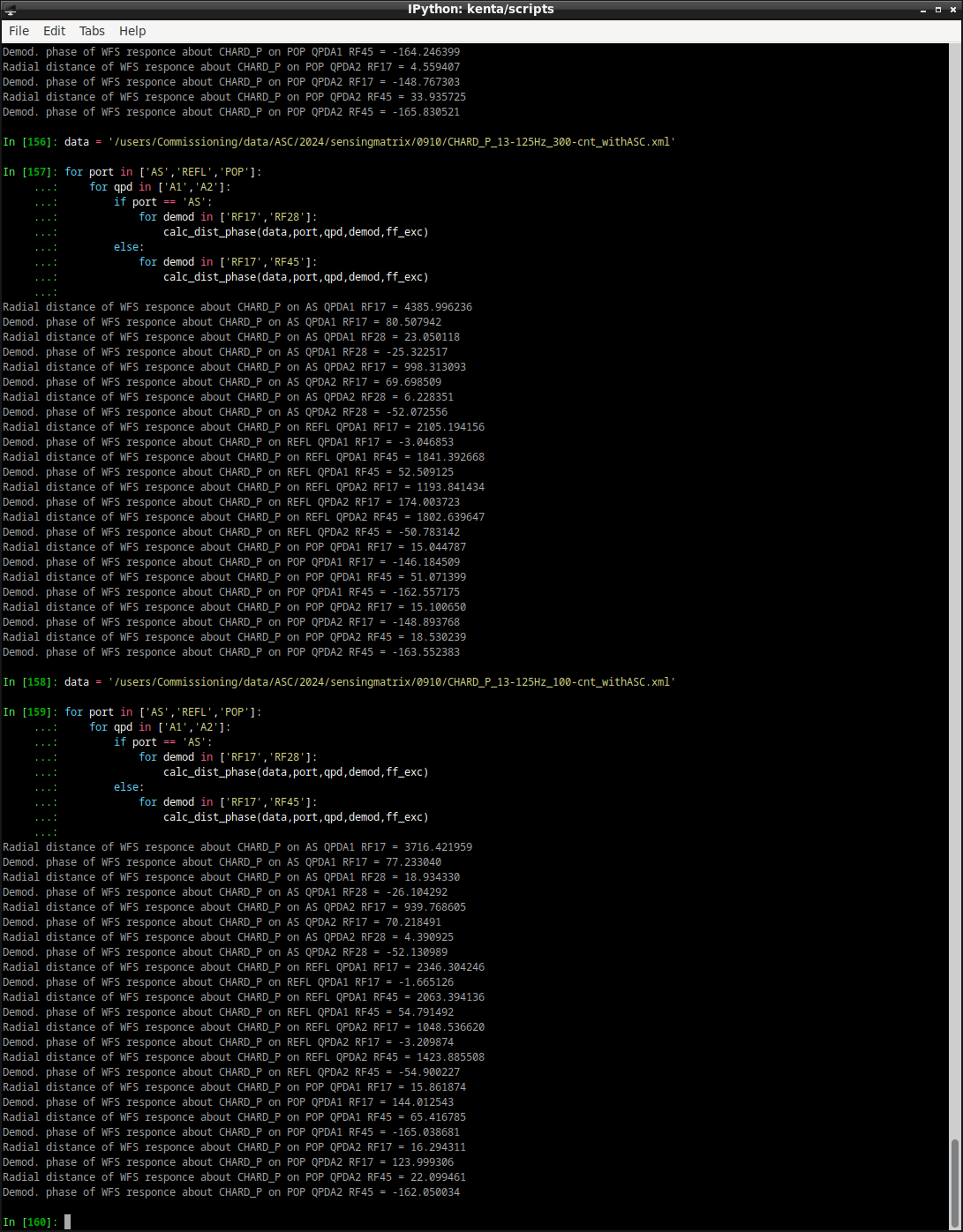
Directory we used: `/users/Commissioning/data/ASC/2024/sensingmatrix/0910`
The file names are {CSOFT, CHARD, DSOFT, DHARD, BS, PRM}_{P,Y}_{6,13}-125Hz_{100, 300}-cnt.xml
- What we measured by 15:00 JST.
- CSOFT-Y ->
CSOFT_Y_6-125Hz_100-cnt.xml, CSOFT_Y_6-125Hz_300-cnt.xml - CHARD-P ->
CHARD_P_13-125Hz_100-cnt.xml, CHARD_P_13-125Hz_300-cnt.xml - DHARD-P ->
DHARD_P_13-125Hz_100-cnt.xml, DHARD_P_13-125Hz_300-cnt.xml - DSOFT-P ->
DSOFT_P_13-125Hz_100-cnt.xml, DSOFT_P_13-125Hz_300-cnt_old.xml - Because the alignment looked worse, we performed alignment adjustment with the
ASC_SERVO_VIEW_ARM.adl - Again:
DSOFT_P_13-125Hz_300-cnt.xml - CSOFT-P ->
CSOFT_P_13-125Hz_100-cnt.xml, CSOFT_P_13-125Hz_300-cnt.xml - CHARD-Y ->
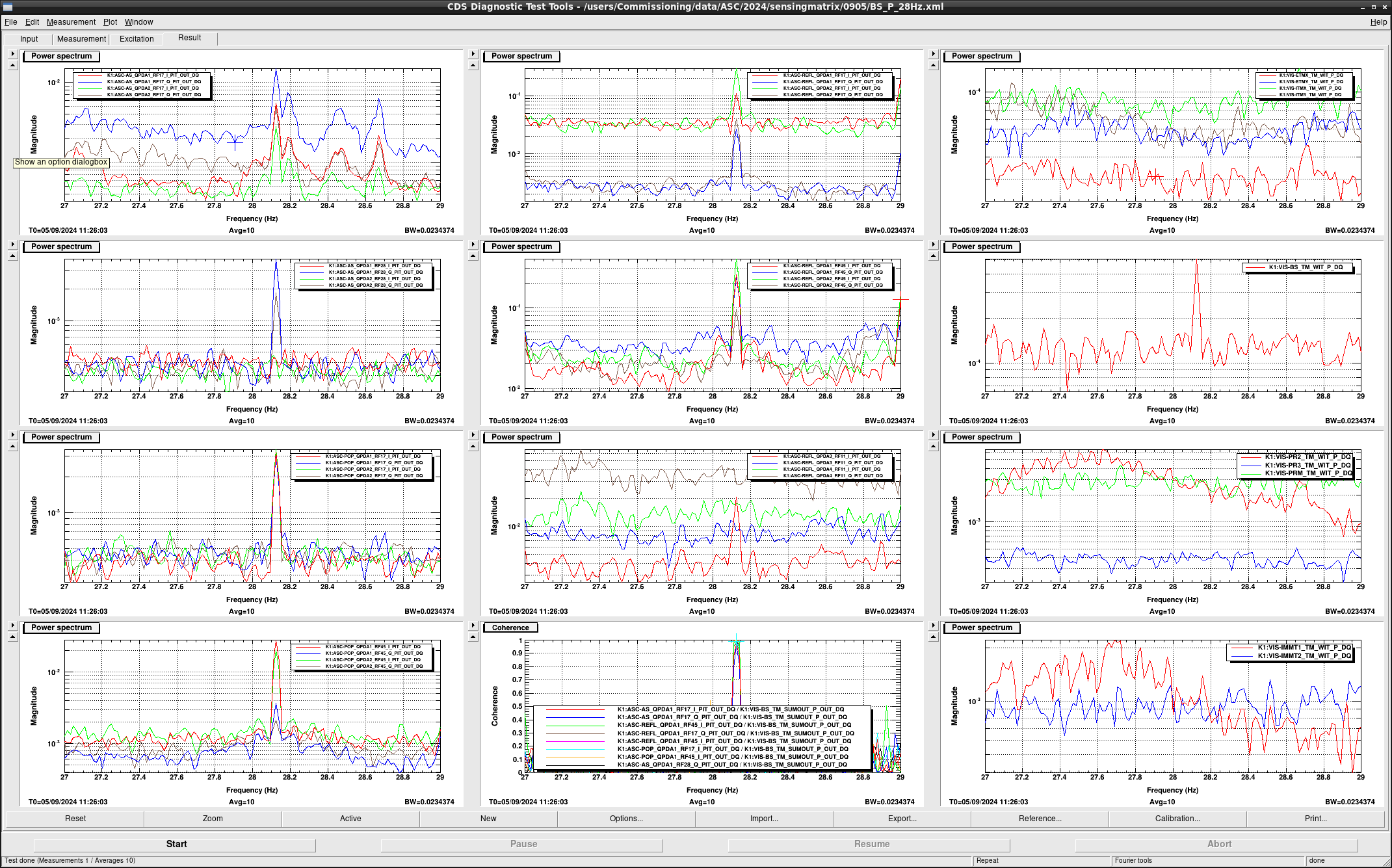
CHARD_Y_6-125Hz_300-cnt.xml - BS-P ->
BS_P_13-125Hz_100-cnt.xml, BS_P_13-125Hz_300-cnt.xml - BS-Y ->
BS_Y_13-125Hz_100-cnt.xml, BS_Y_13-125Hz_300-cnt.xml - PRM-P ->
PRM_P_13-125Hz_100-cnt.xml, PRM_P_13-125Hz_300-cnt.xml - PRM-Y ->
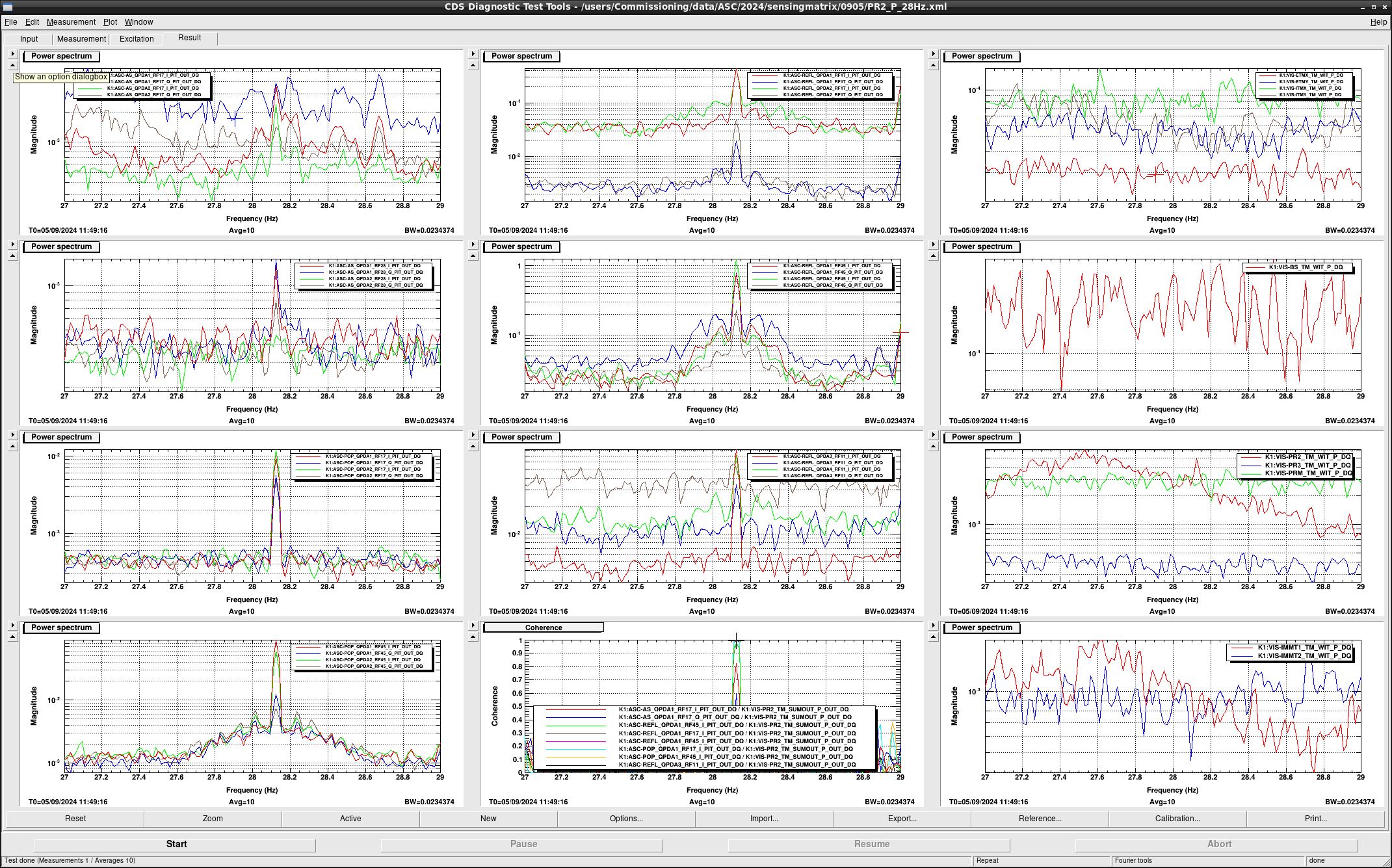
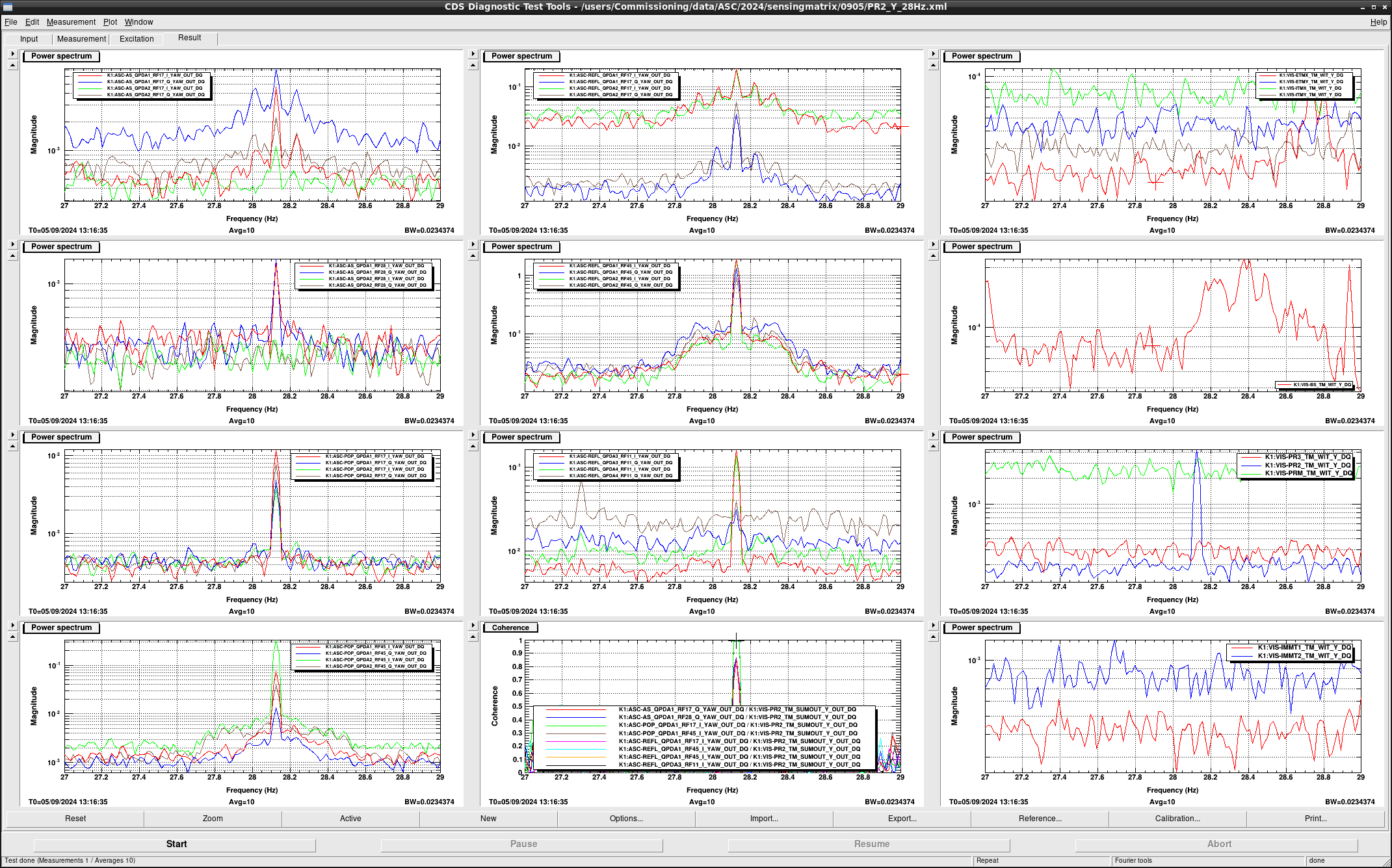
PRM_Y_6-125Hz_100-cnt.xml, PRM_Y_6-125Hz_300-cnt.xml - PR2 -> not yet
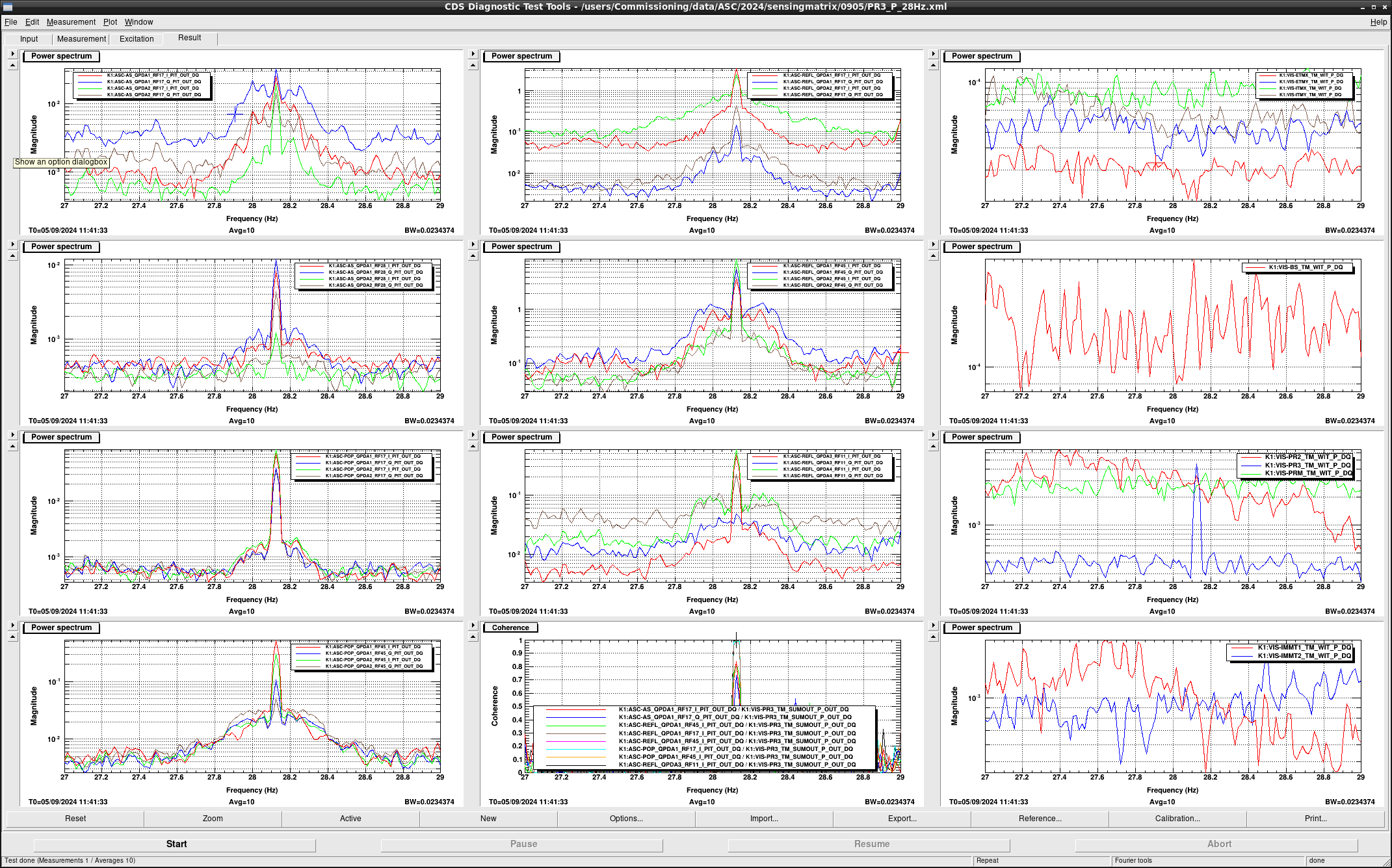
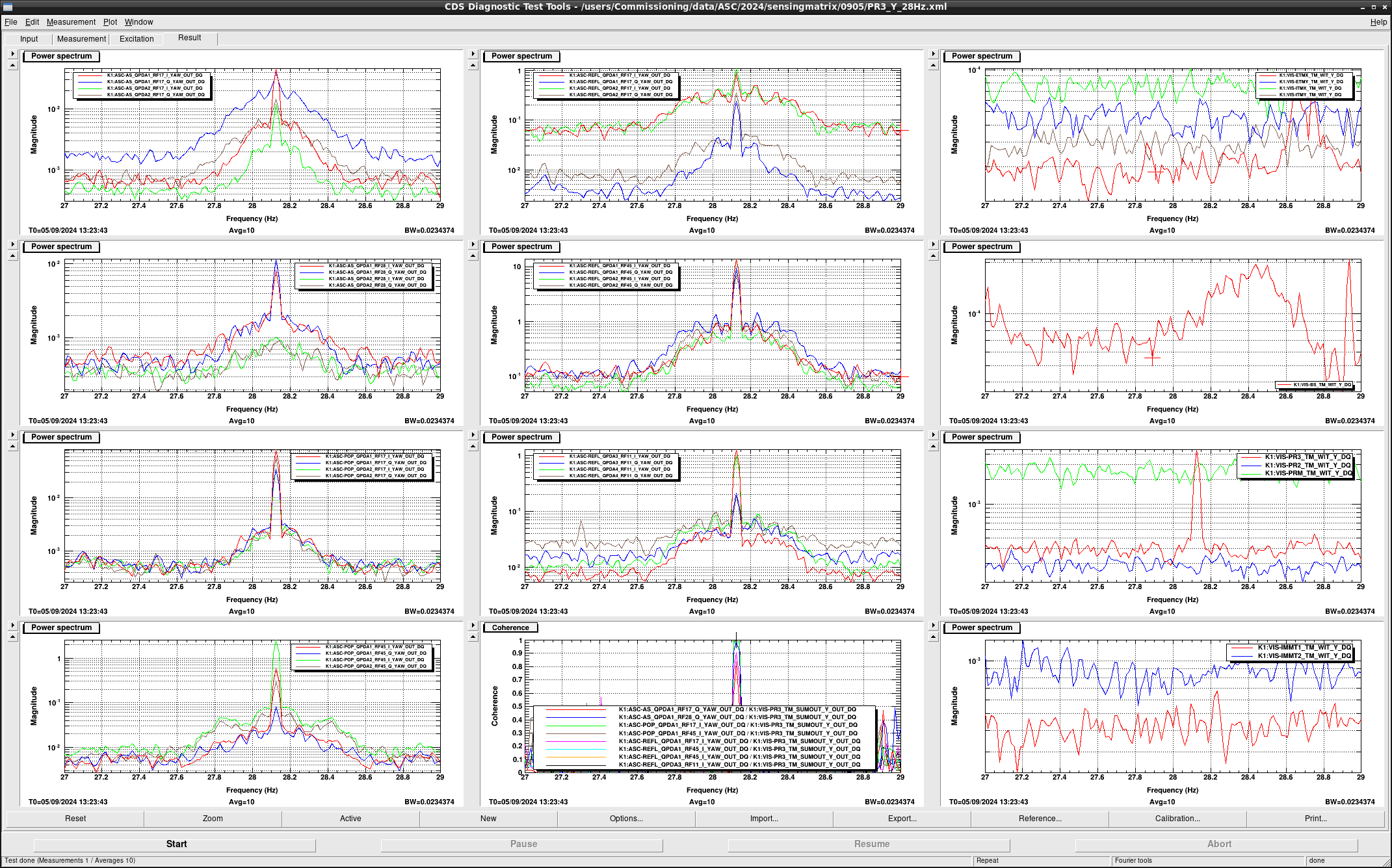
- PR3 -> not yet
- IMMT2 -> not yet
- IMMT1 -> not yet


































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}