[Washimi, Ushiba, Takahashi]
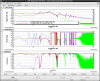
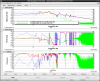
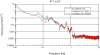
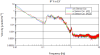
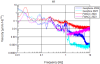
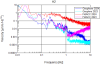
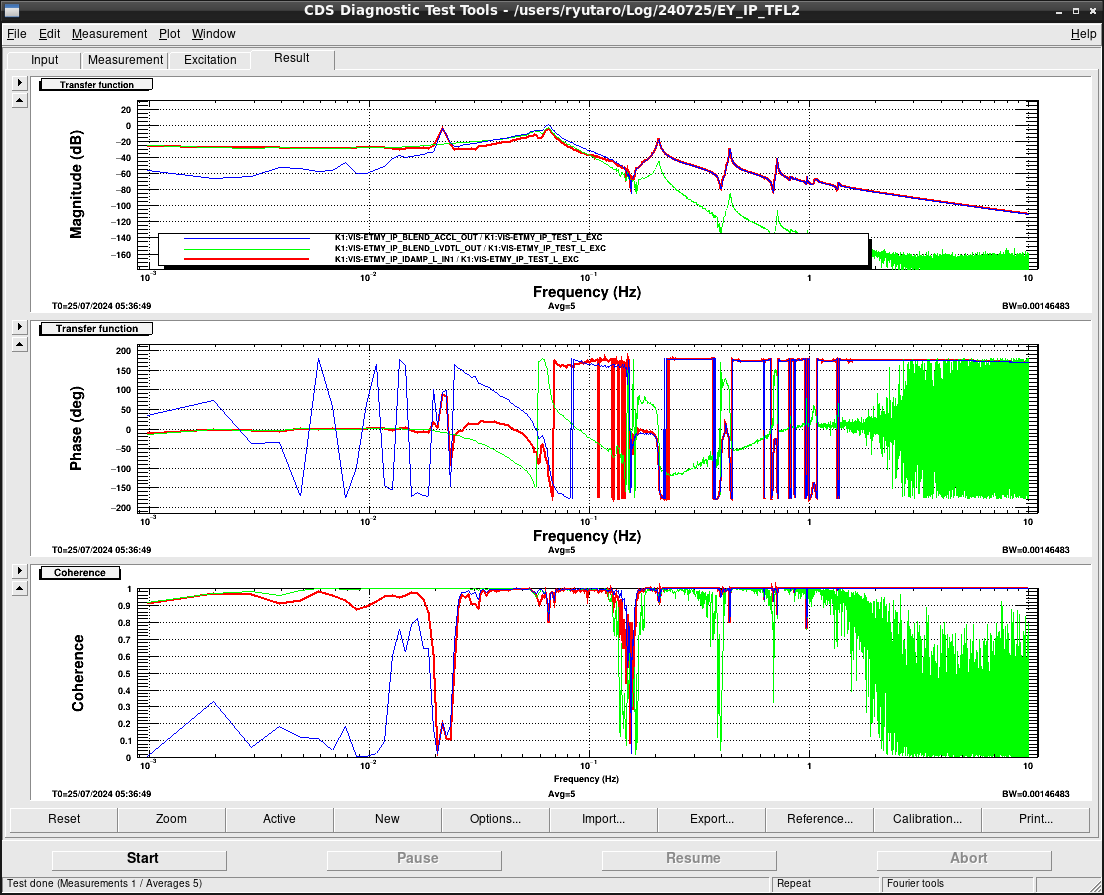
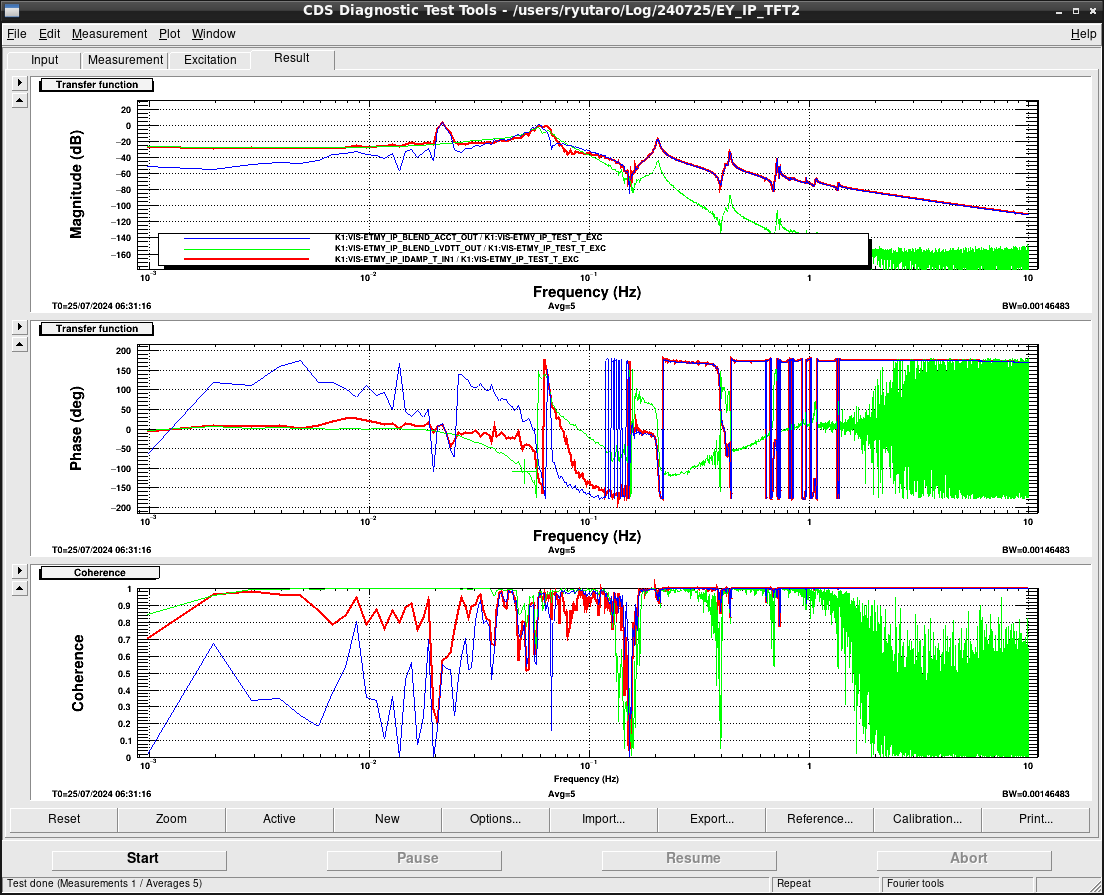
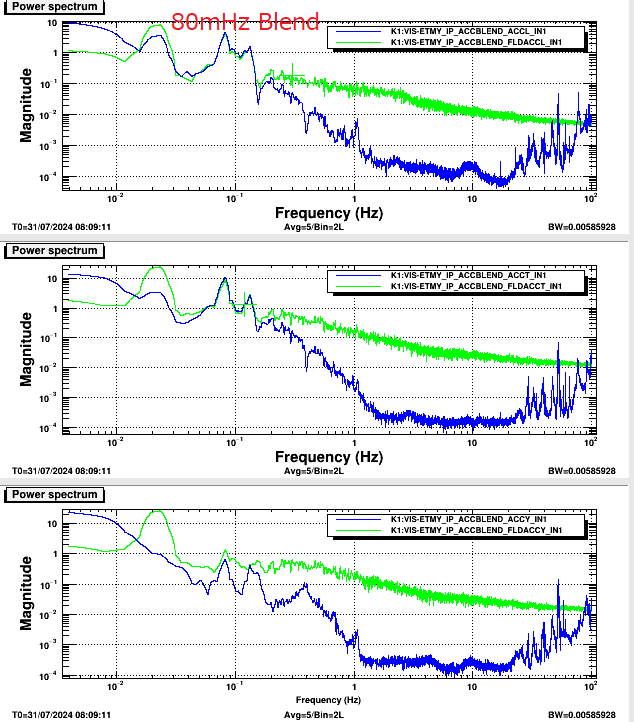
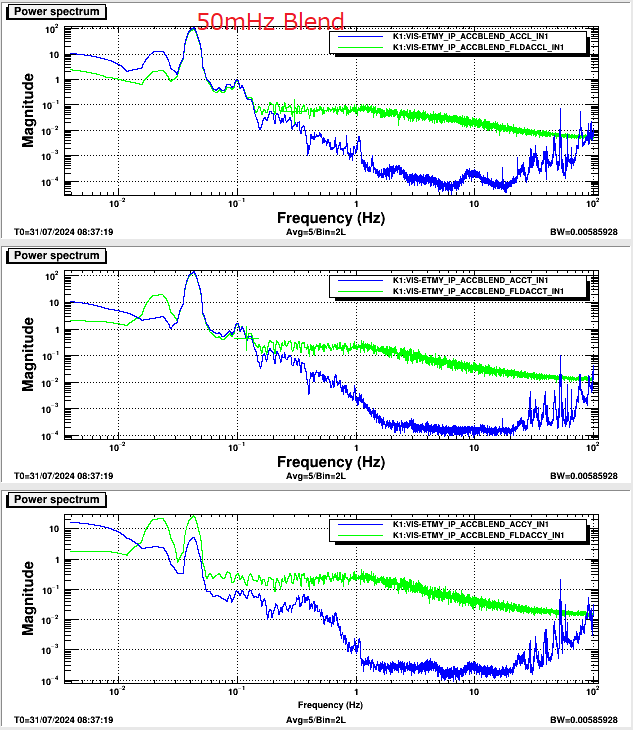
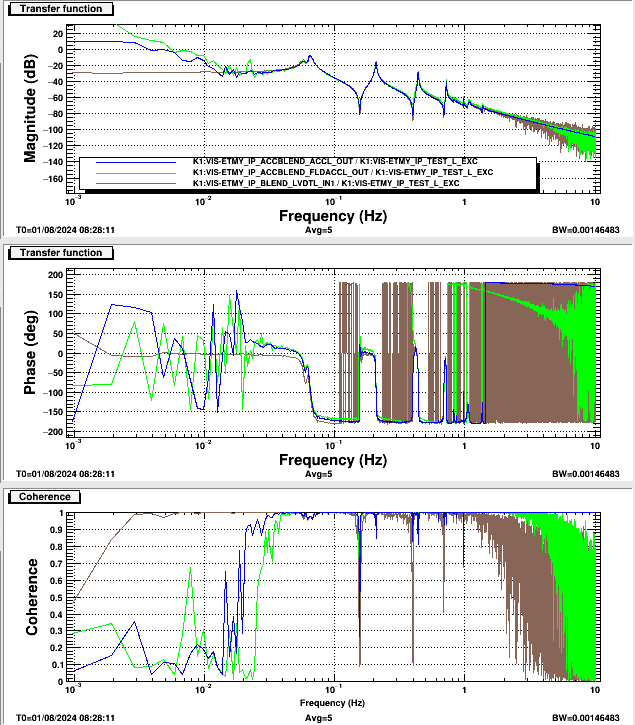
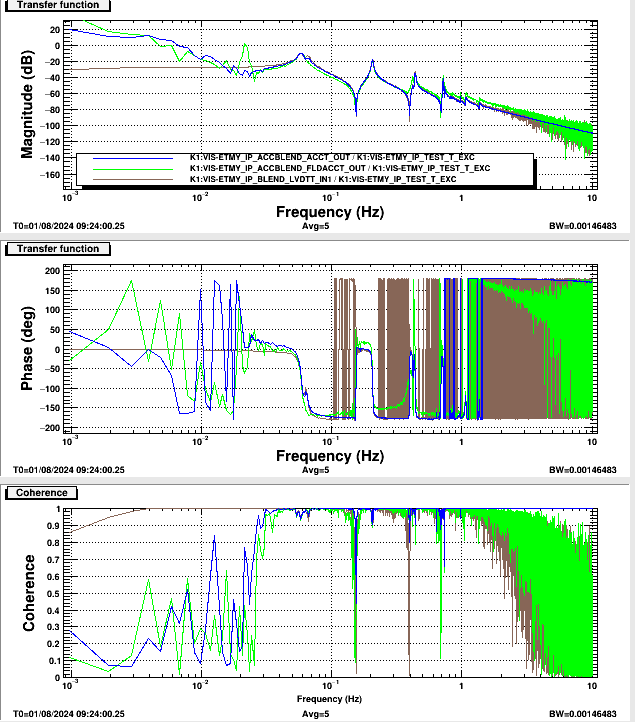
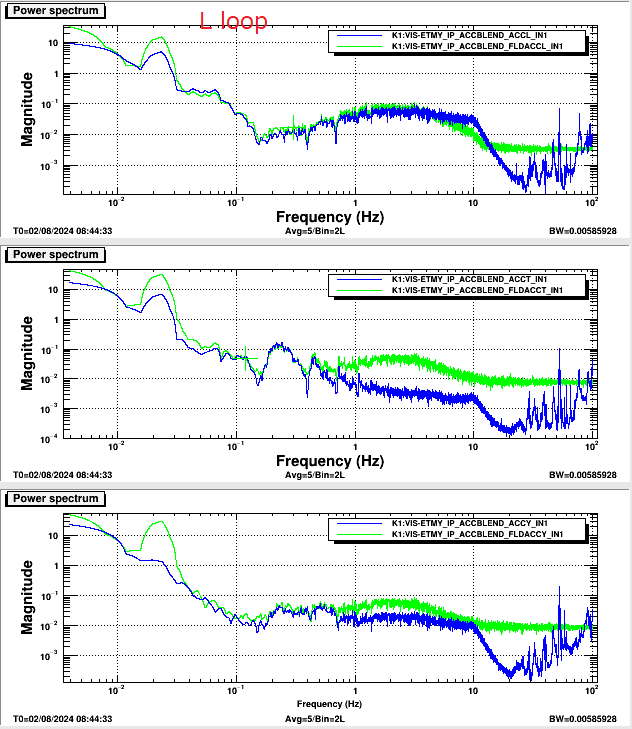
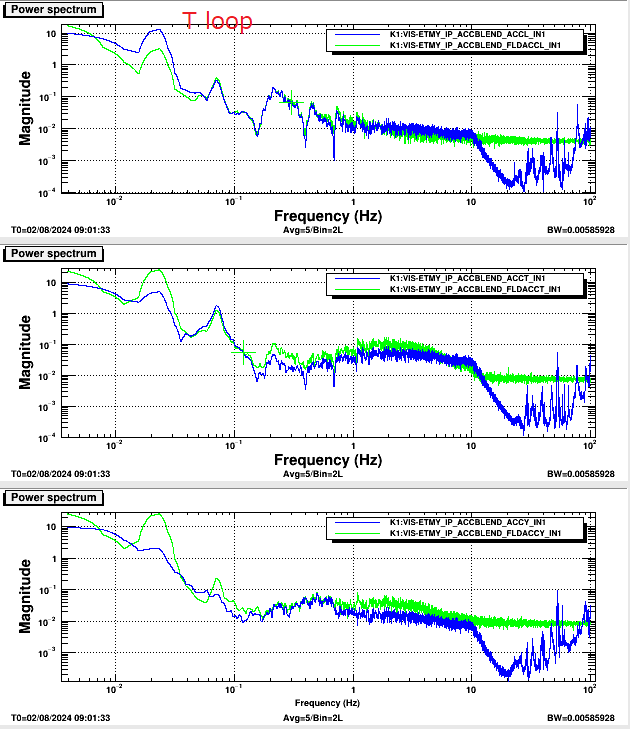
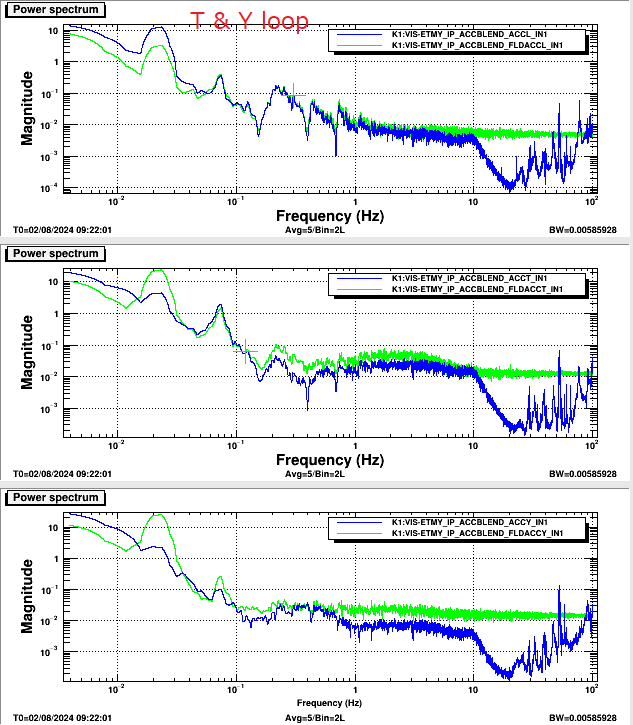
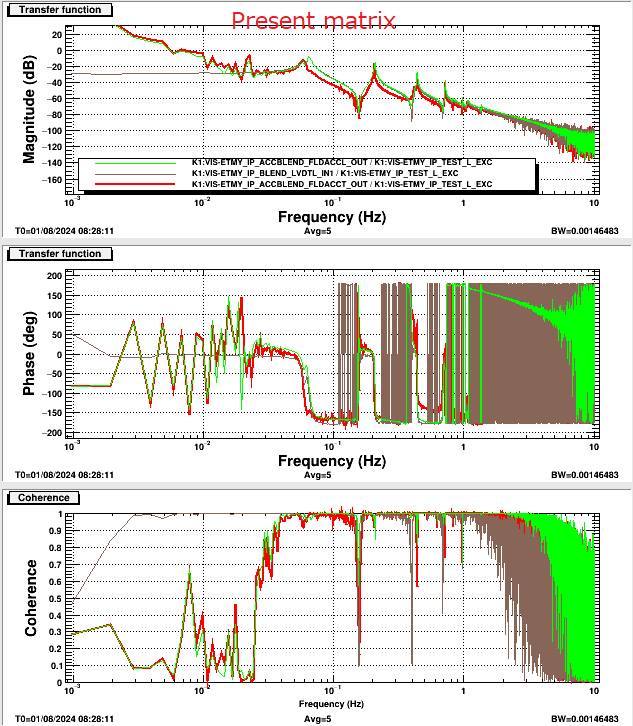
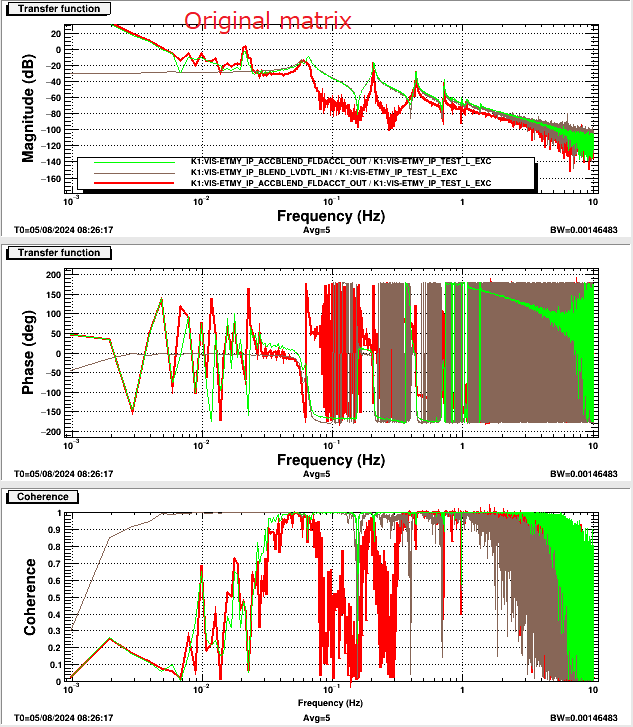
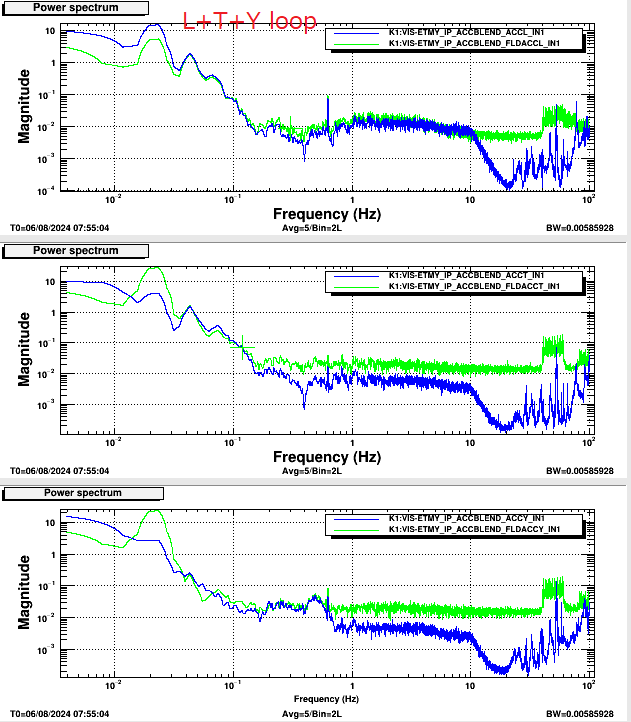
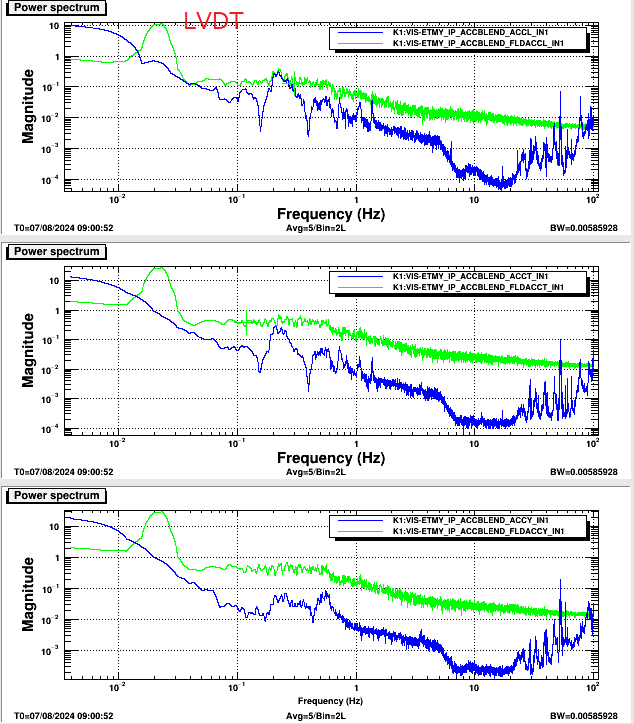
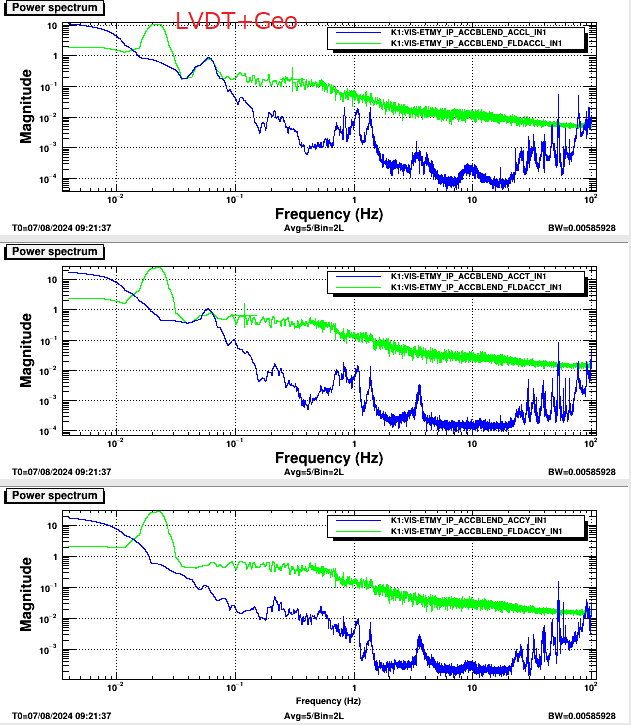
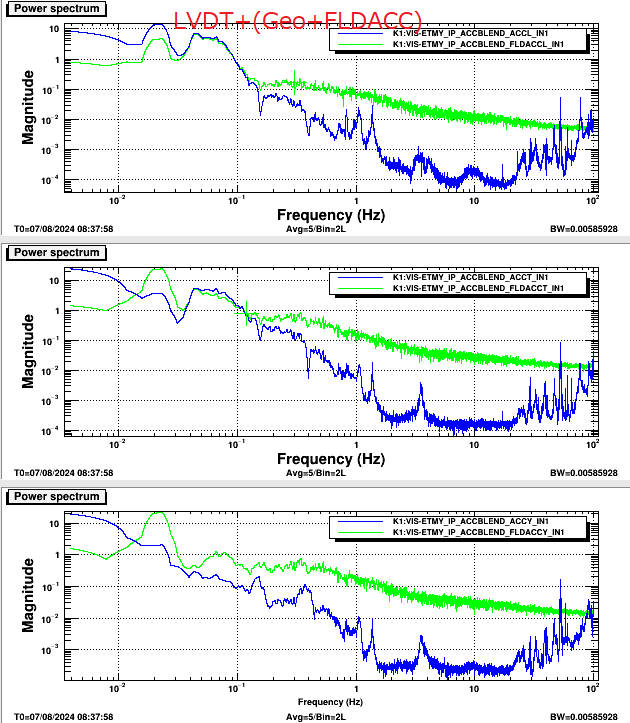
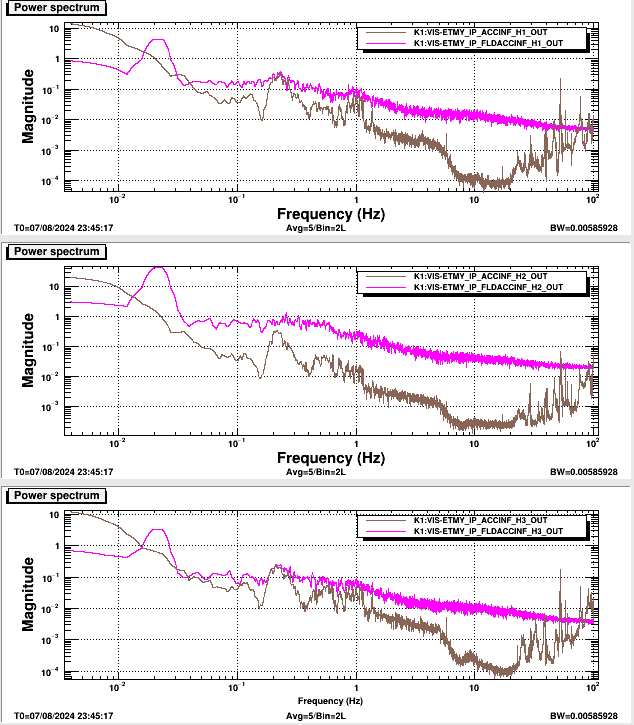
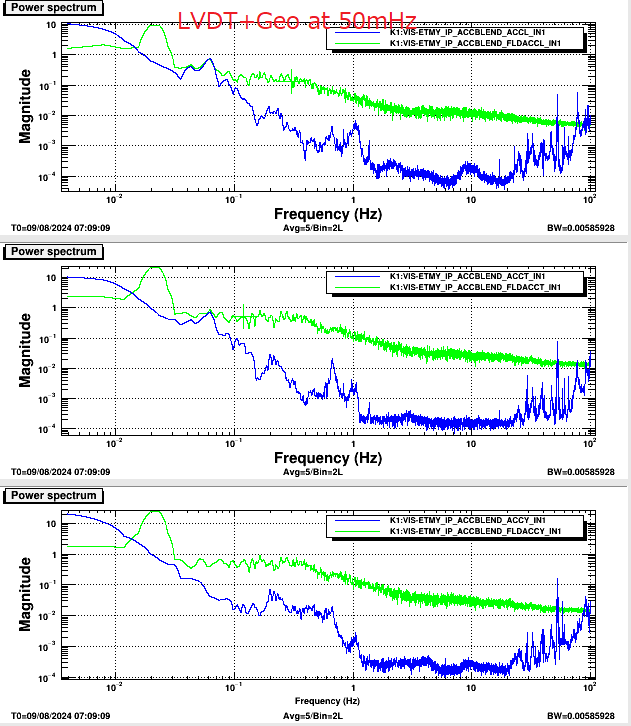
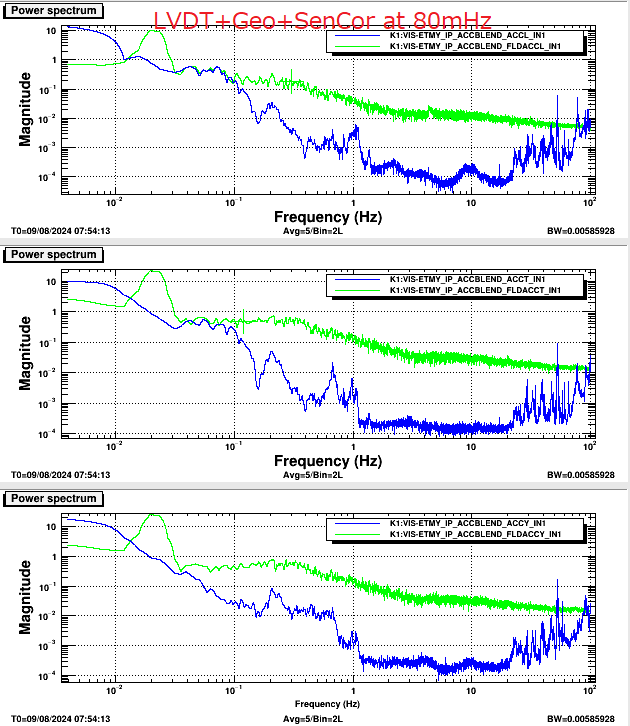
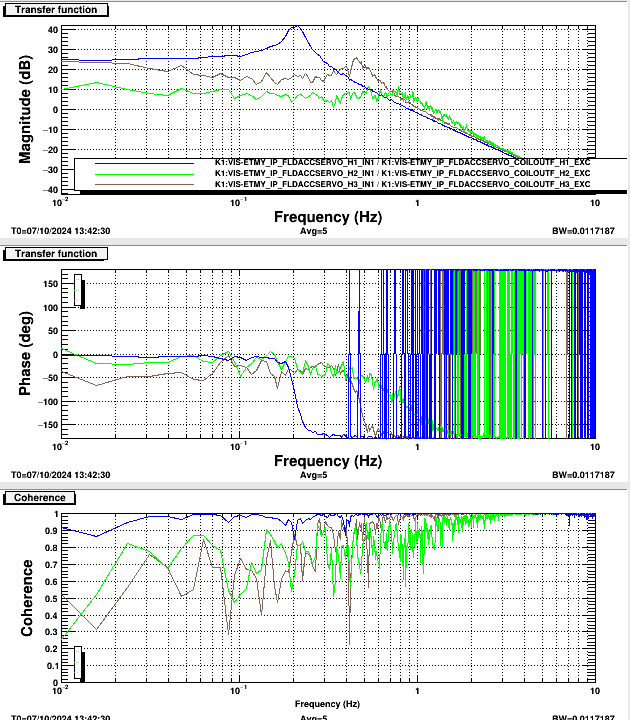
We measured the transfer functions of the IP from the virtual actuator (L, T) to each virtual sensor and blended sensors. The inertial sensors and the LVDTs were blended at 50mHz. The blended TF of L has a small dip around 60mHz. The phase correction for the inertial sensors should be adjusted.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}