[Tanioka, Morozumi, Akutsu]
In Mitaka (2017 June 22).
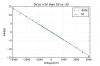
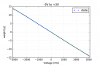
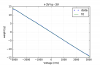
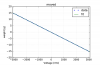
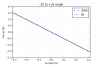
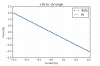
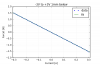
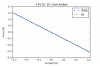
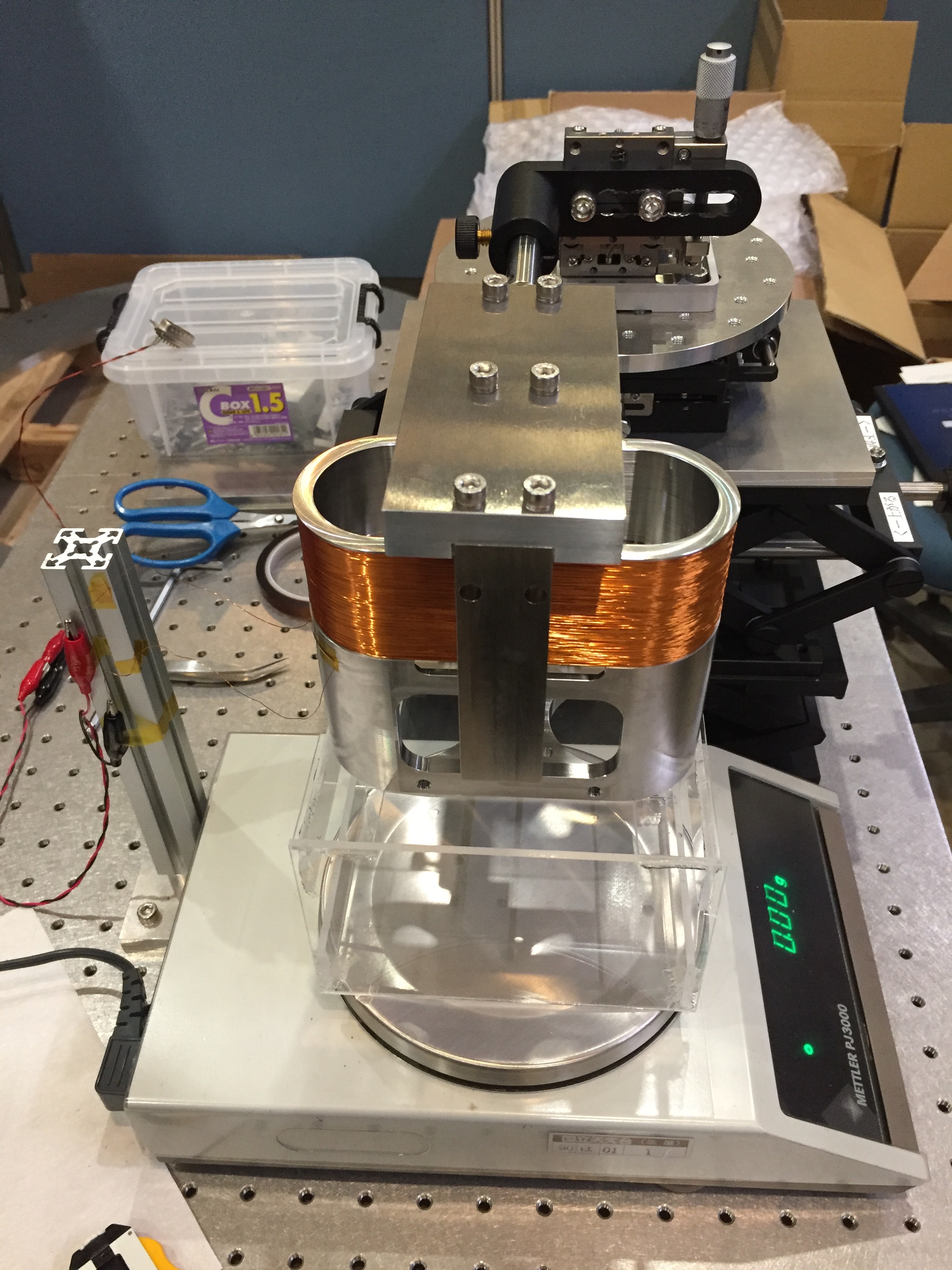
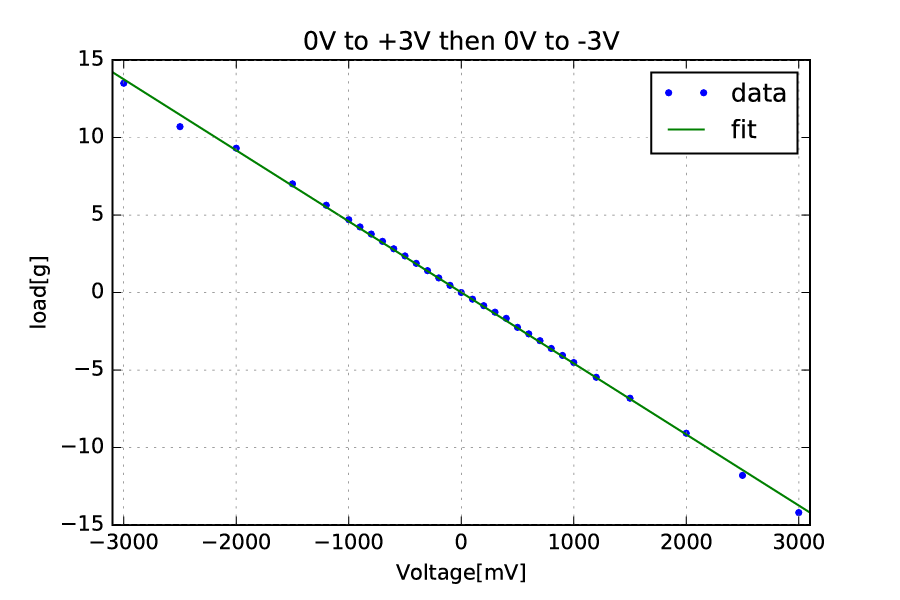
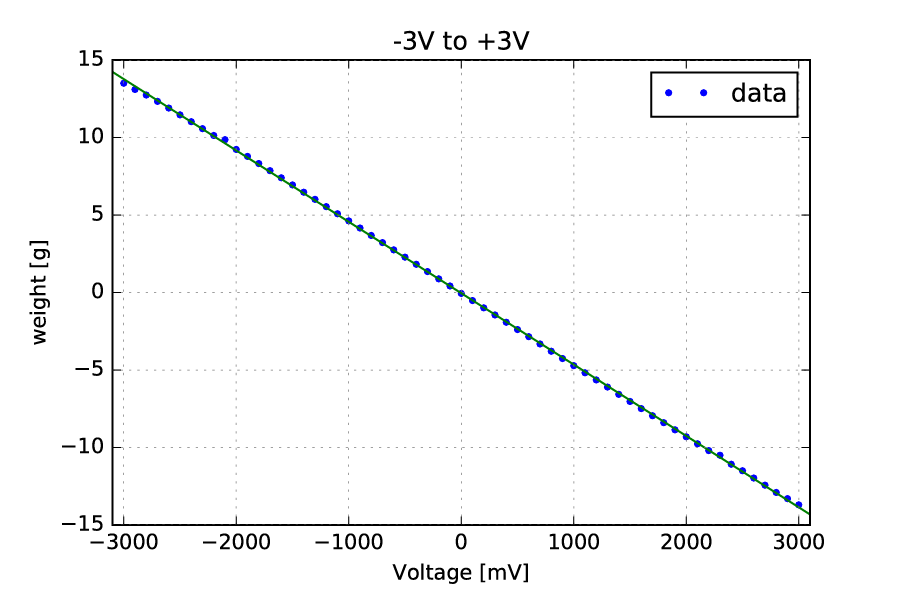
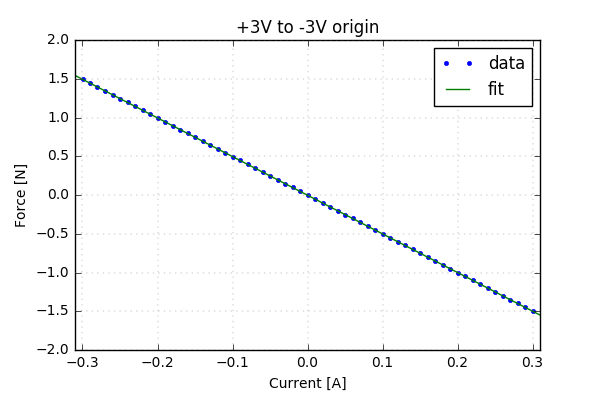
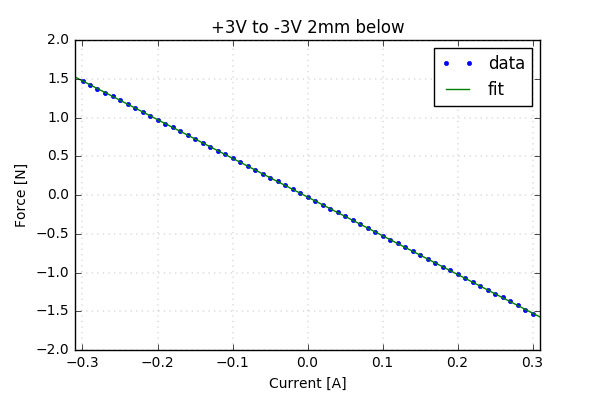
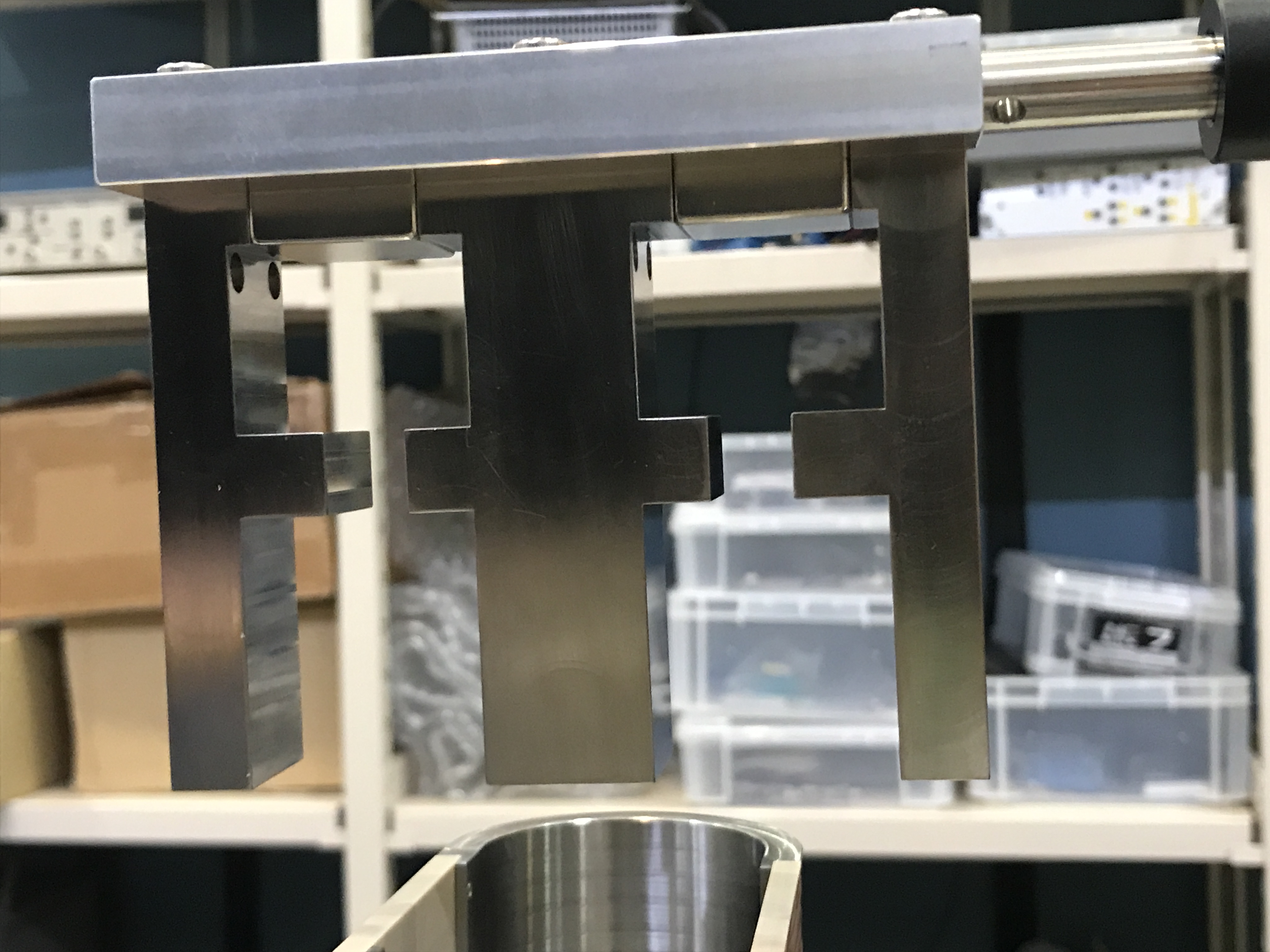
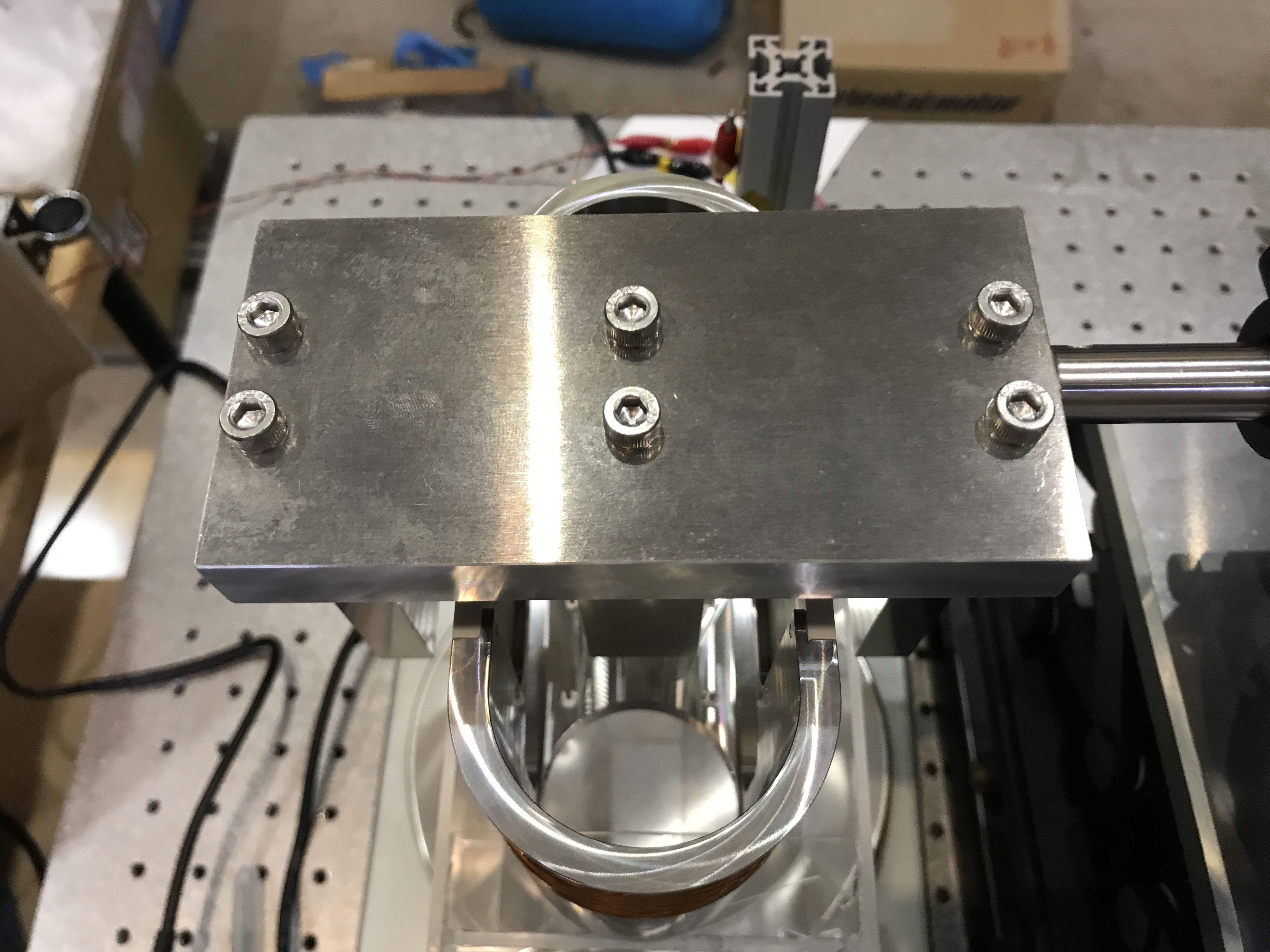
The KAGRA transmission monitor system (TMS) will be put on a vibration isolation stage in the future. The stage will have active control, and so we are developping some local sensors and actuators. We made a testbench to check the local actutator (coil magnet one) in Mitaka.
The coil part is put on a metler with a plastic leg, which makes a distance beween the sensitive dish of the metler and the coil/magnet part so that the sensitive dish won't get fake signals from the magnetic field. The the metler part was covered by a carton box so that air flow does not fluctuate the measurement. Now the output signal get stable. After connecting the coil wires to a driver with a adapter cable, we zerod the readout (tuned the offset). We are ready...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}