[Kamiizumi, Tomura, YamaT]
This is a similar work with klog#29211
Abstract
We added the latch function in order to switch input gain of CARM common mode servo without making serious glitches.
k1alspll and DAQ were restarted to apply the update of the real-time model.
After updating model, glitches at the timing of switching gain is drastically mitigated same as the case of IMC common mode servo.
Details
In order to mitigate glitches due to the timing gap between ON and OFF of the binary output, we applied a same model update as IMC servo to CARM servo. Common mode servo block with the latch function was prepared as the library in the last time. So today I just copied it to k1alspll model and restarted the k1alspll and DAQ for applying updates.
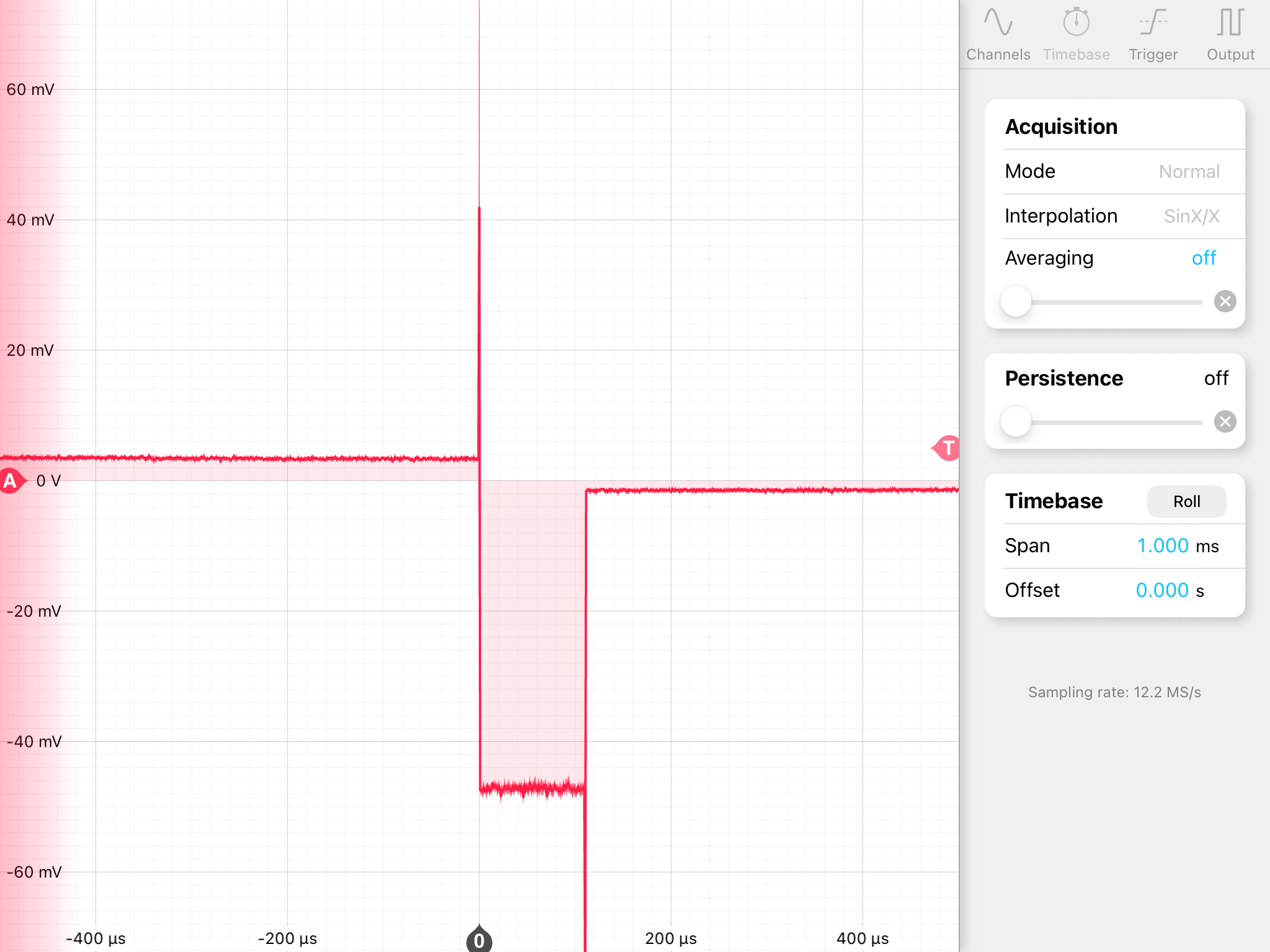
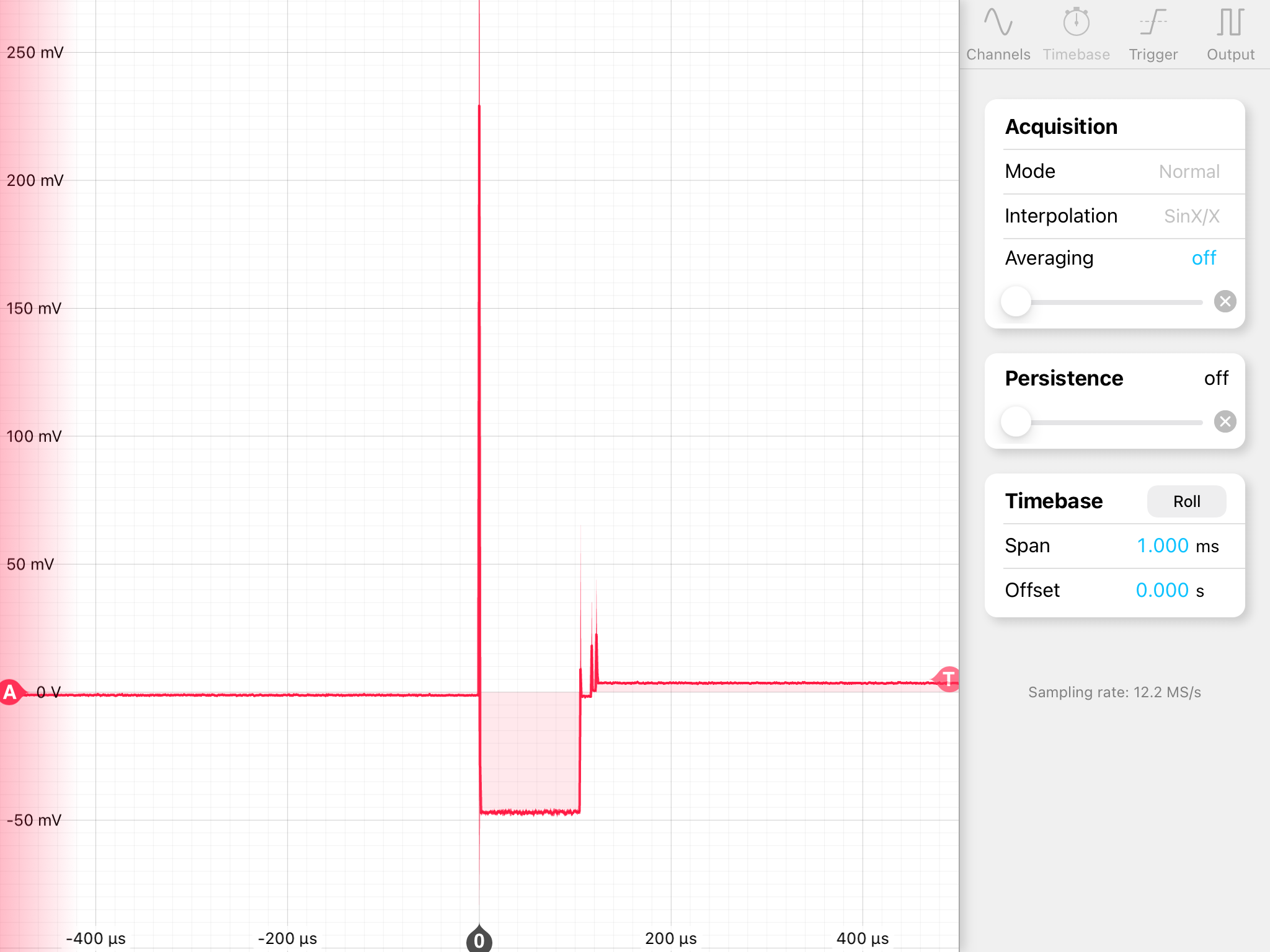
We also checked a glitch situation at the OUT2 port when gain was changed. Fig.1 and Fig.2 show readout voltage without the latch function at OUT2 when IN1_GAIN was changed as 16dB->15dB and 15dB->16dB, respectively. As same as IMC case, there is a timing gap as ~100us between ON and OFF of the binary output. In Fig.2 (15dB->16dB), multiple glitches can be seen around t=100us. It seems to come from a timing gap of turning OFF 1, 2, 4, and 8dB stages. In the case of IMC servo, we couldn't find such behaviors. So a presence of such behavior depends on individual differences of BO cards.
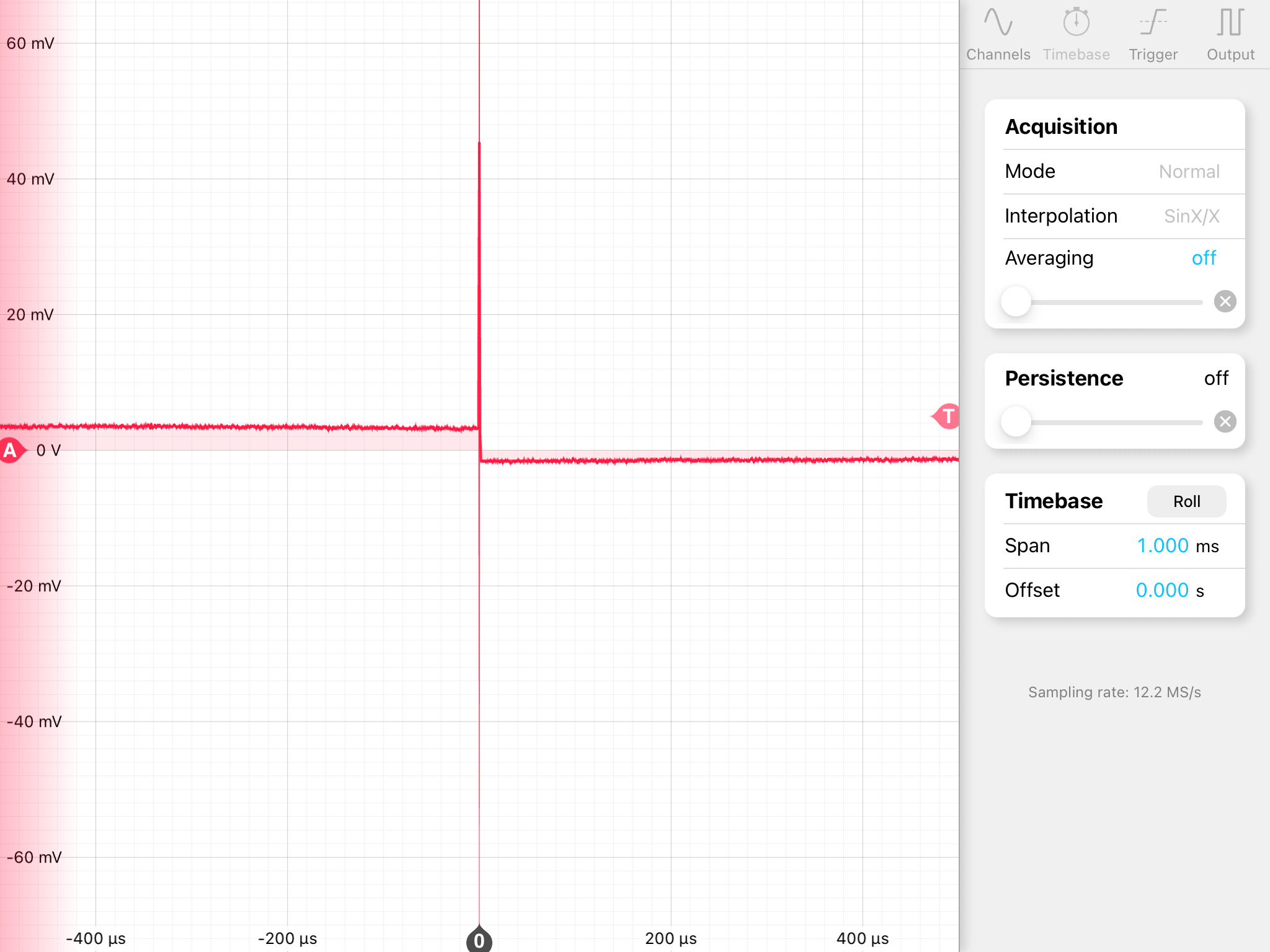
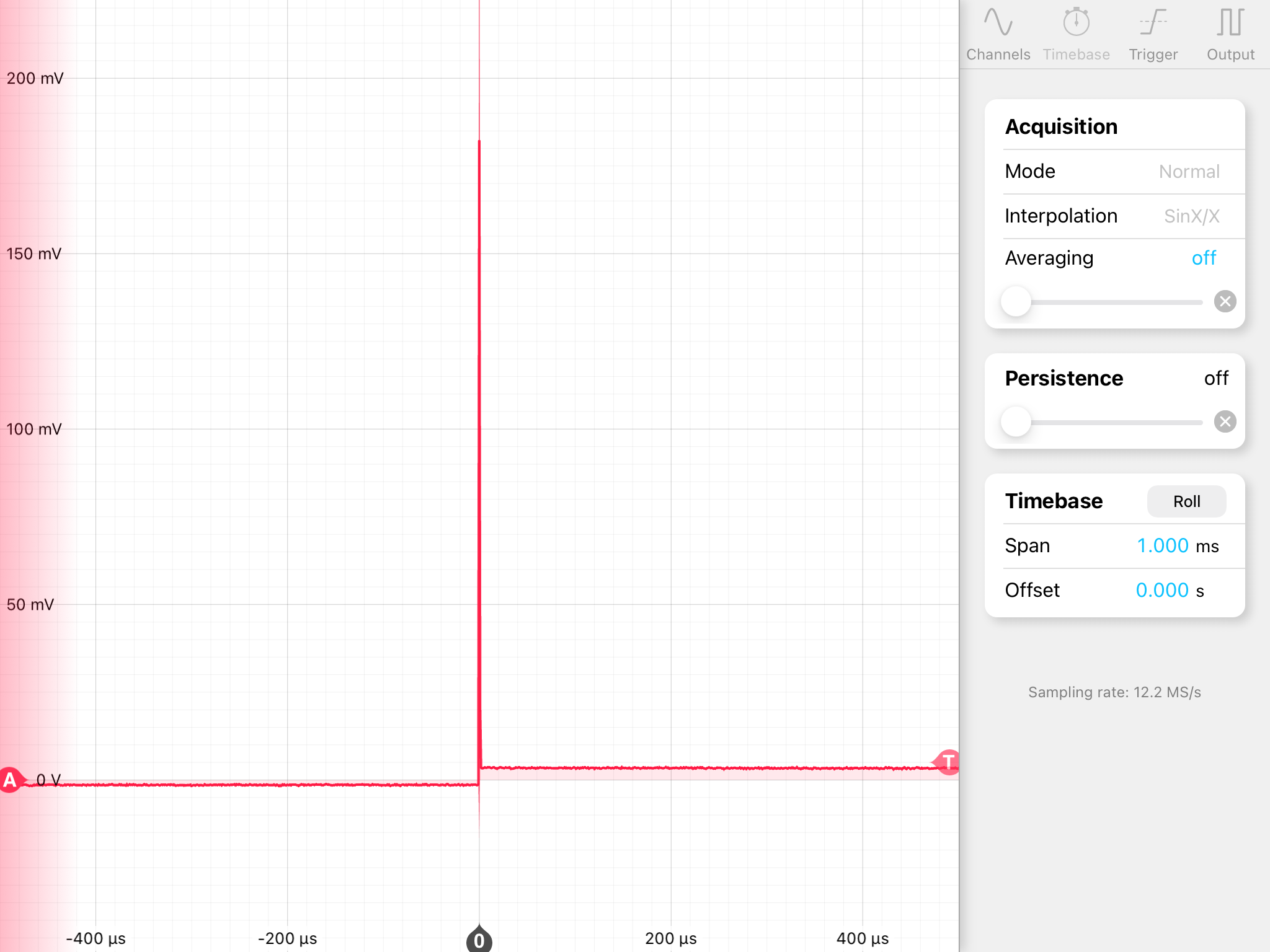
Read out voltage with the latch function is shown in Fig.3 (16dB->15dB) and Fig.4 (15dB->16dB). According to these plots, the latch function works fine also for the CARM servo. Let's check the improvement also on the lock acquisition after CARM and IFO comes back.




{kind=link}
{kind=link}
{kind=link}
{kind=link}