Ushiba, Tanaka
### Abstract
We achieved DC readout without BS ASC and BPCs for ETMX, ETMY, and PR2. but we have still a lot of things to do to restore the sensitivity to as same as O4a.
### What we did
-
We attempted to hand it over from RF to OMC DC, and this transition was as successful as the previous trial. As reported earlier, because the BS ADSs did not perform well when we engaged the PRCL and MICH low-noise mode, we turned off ADS for BS and BPCs for ETMX, ETMY, and PR2. Afterward, we attempted to engage the low-noise PRCL and MICH mode and succeeded. We observed significant movement in PRM alignments, and TRANS powers fluctuated as PRM moved. As a result, we reduced the gain of ADS for PRM to 1/10. The fluctuation appears to have subsided, and the IFO lock seems more stable. Subsequently, we were able to engage the MICH and PRCL feedforward controls used in O4a.
-
According to the current DARM spectra, the low-frequency region seems to be limited by control noises (possibly ARM ASC) and DAC noise due to the absence of TM dewhitening filters. On the other hand, the high-frequency region of DARM spectra seems to be dominated by ADC noise from OMC DC PDs.
-
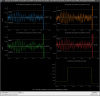
Fig. 1 illustrates the time series of PRFPMI error and feedback signals. The cyan line in the left third row and the second column of Fig. 1 represents the signal of OMC-TRANS_DC_A_IN1_DQ without the whitening filter, with the width of white cursors indicating the RMS of this signal during O4a with the whitening filter. As you can see, the current RMS is larger than the O4a one, with the current RMS seeming to be dominated by around 10 Hz fluctuations.
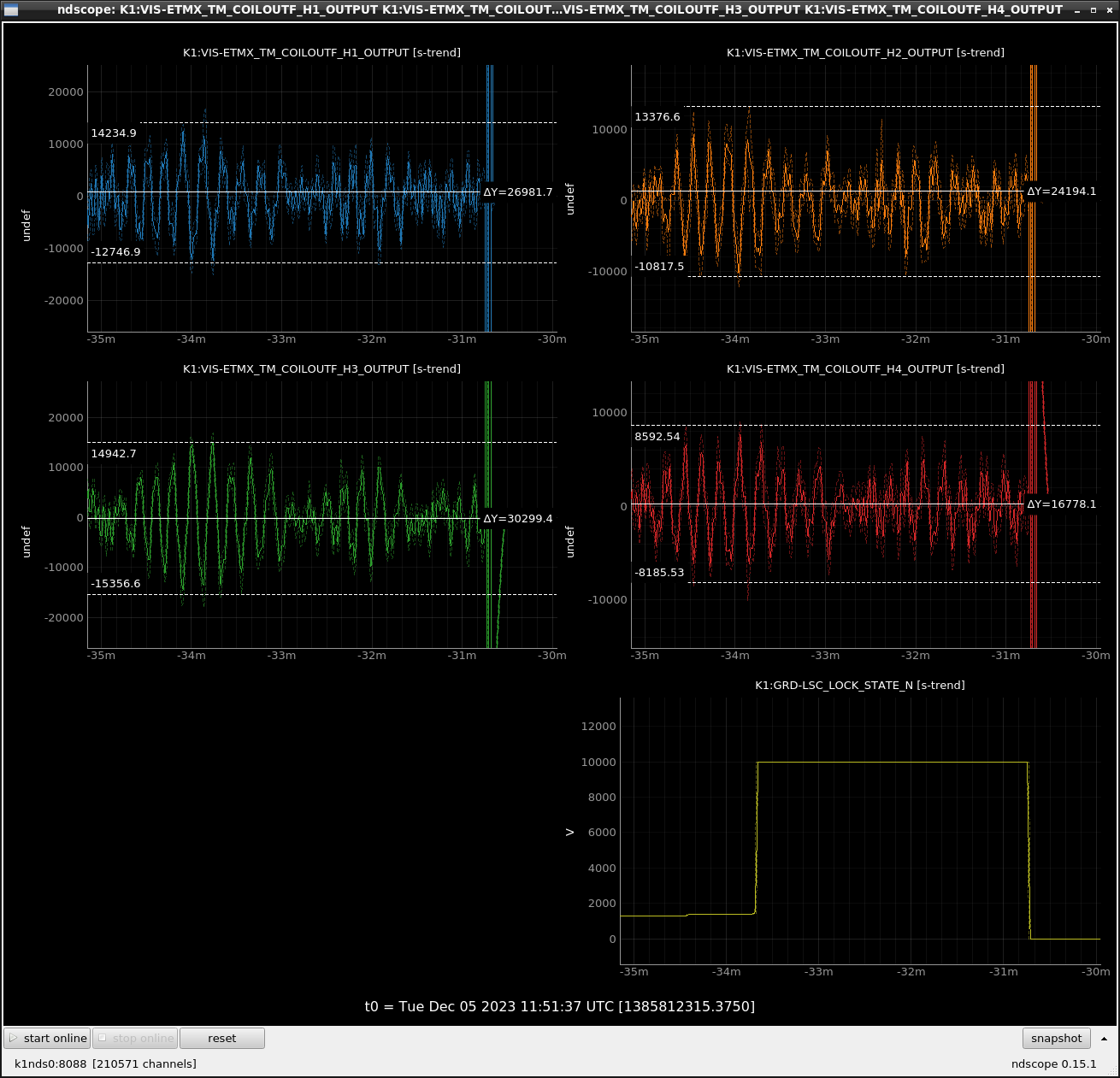
Fig. 2 shows the time series of ETMX TM coil outputs, with the peak-to-peak RMS appearing to be 20000 cnts. It seems challenging to engage dewhitening filters in TM coil drivers.
-
To improve the DARM RMS at this low frequency and engage the whitening filters of OMC DC PD, we may need to consider lowering ARM ASC control, which could be effective in improving the DARM RMS in the low-frequency band.
-
The current lock duration is limited by EY MN oplev glitches.
-
Following that, we tuned the actuator balance of the HARD mode based on ITMX motion and calibrated the error signals of ARM ASC from [cnts] to [urad] using the ITMX oplev signal.
### Todo
- optimize MICH and PRCL feedforward controls
- improve the suspension control (both global and local controls)
- implement BS ASC and BPCs for ETMX, ETMY, and PR2
- engage dewhitening fliters of TM coil drivers
- engage the whitening filter of OMC PD
- fix EY MN oplev glitch issue

{kind=link}
{kind=link}