With Lucia.
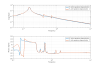
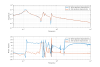
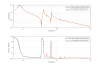
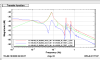
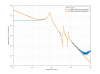
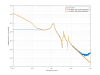
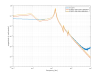
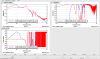
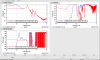
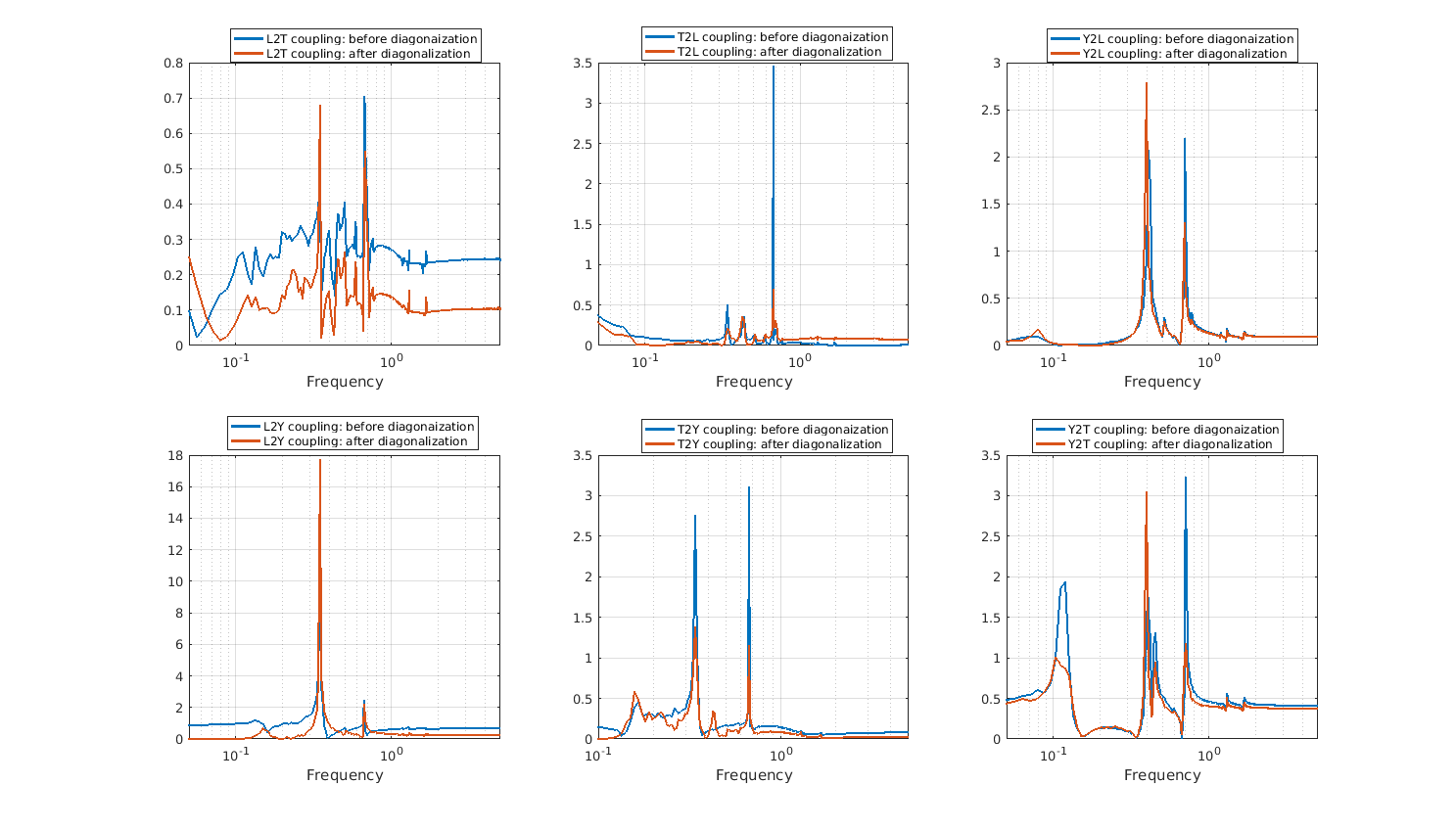
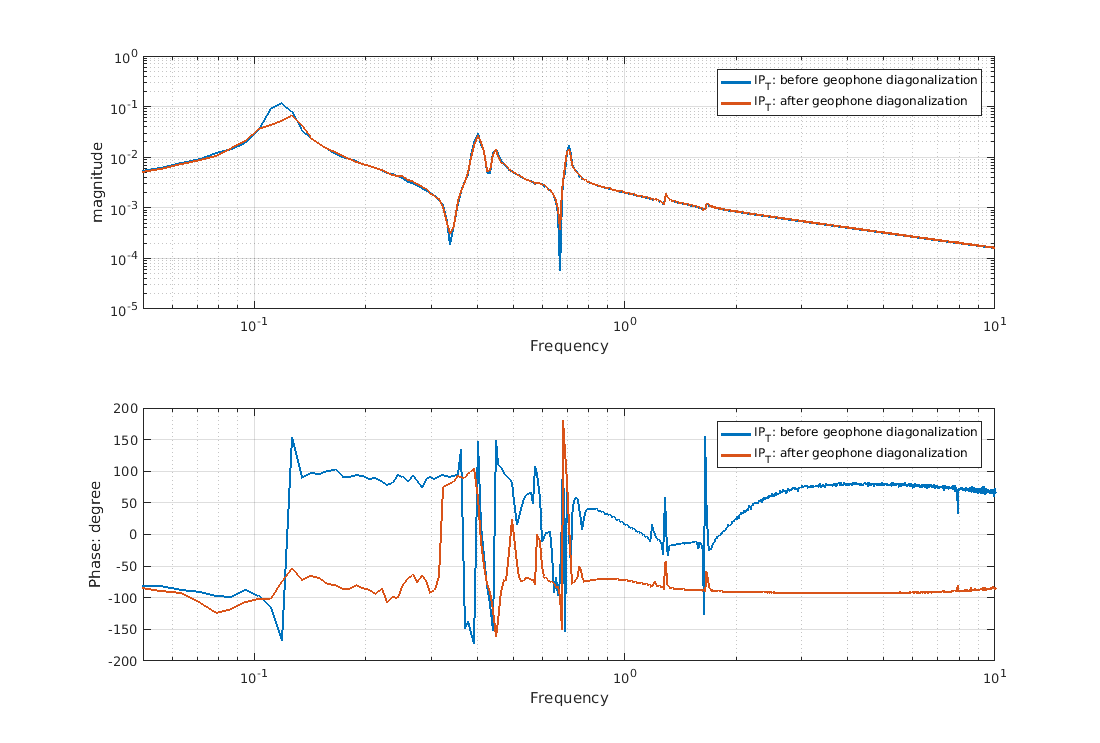
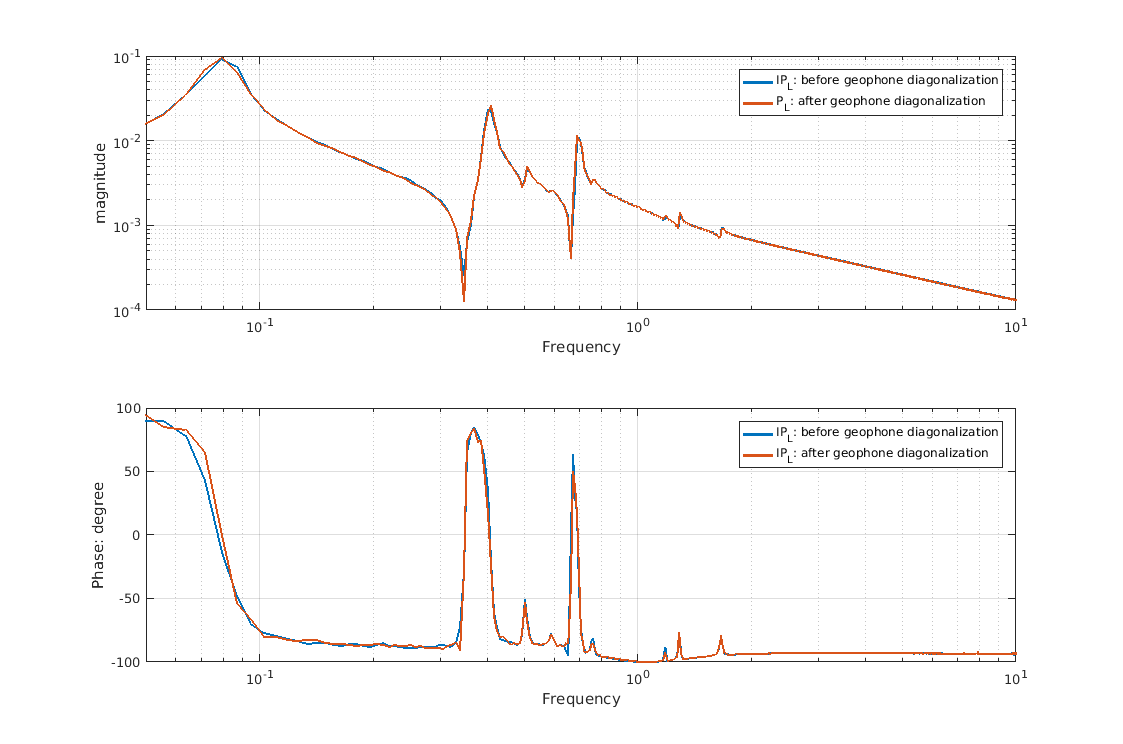
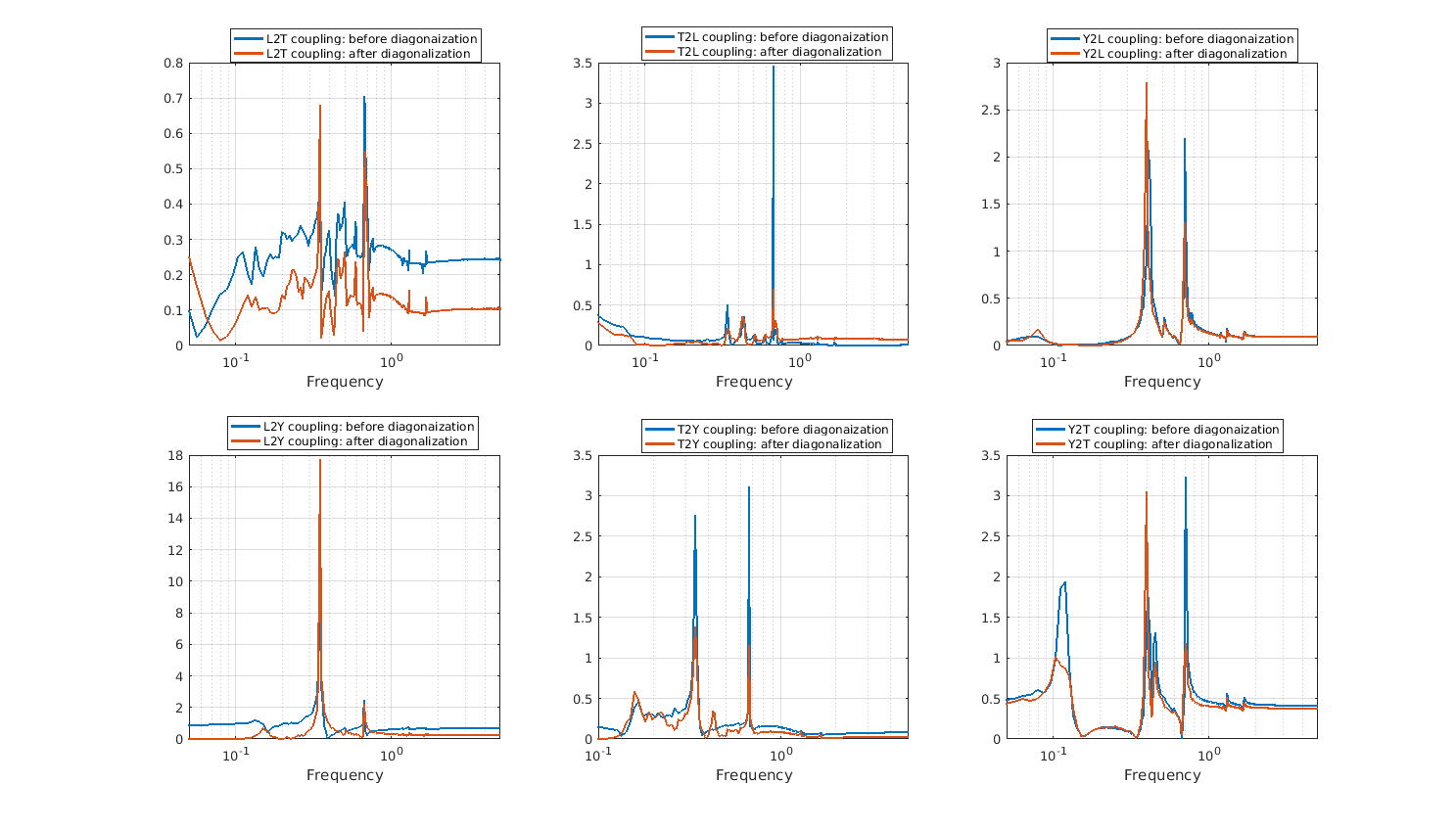
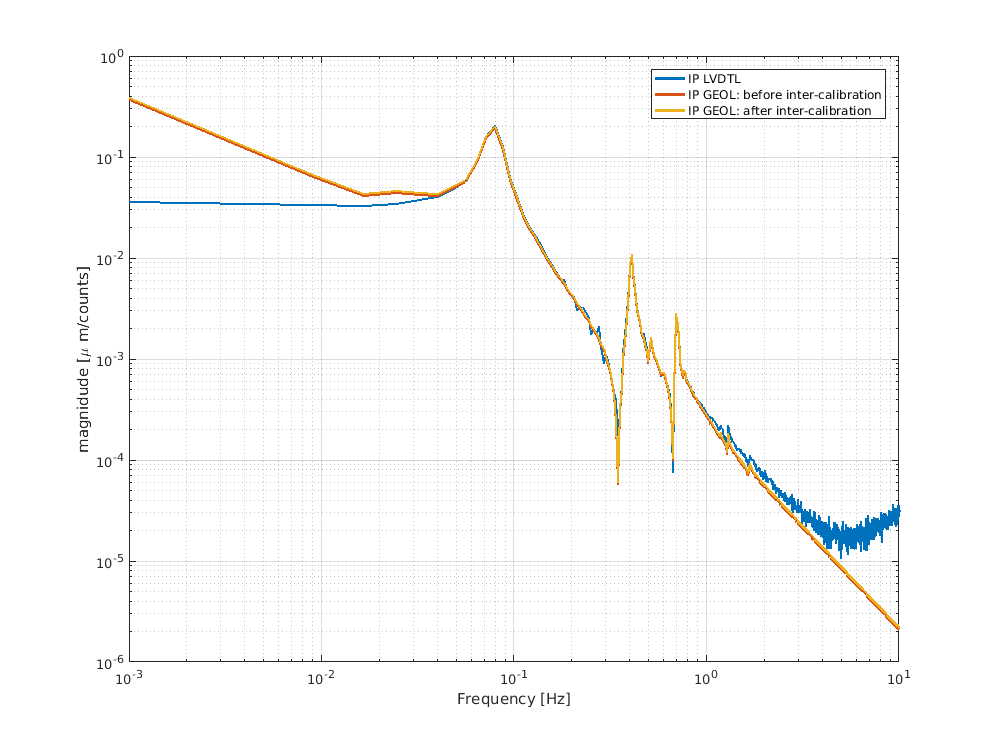
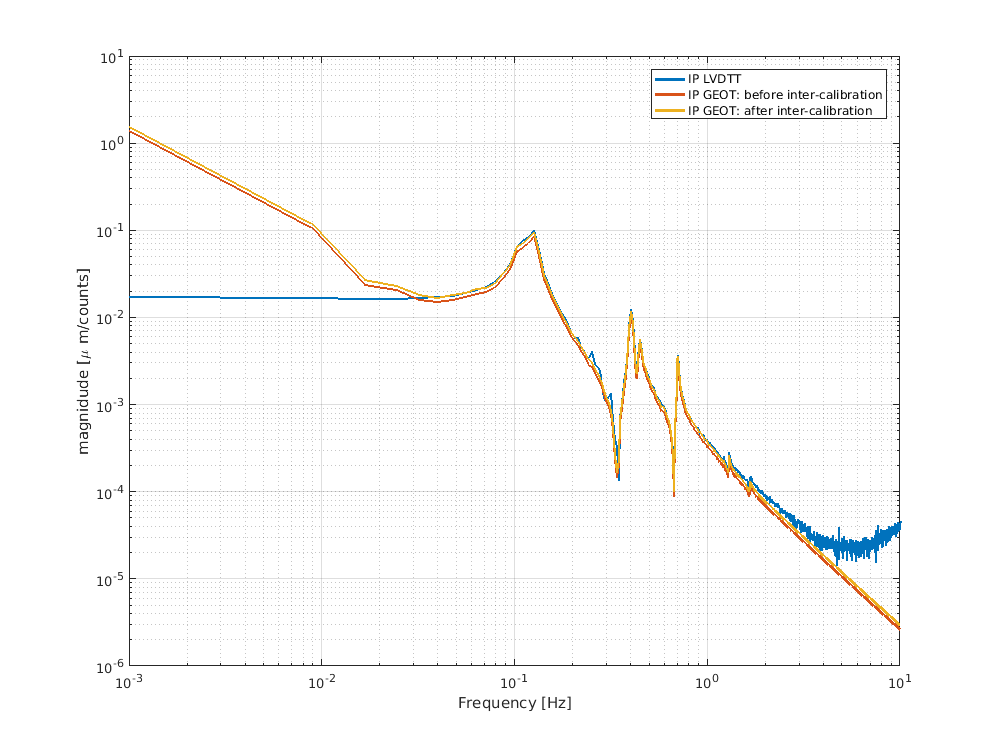
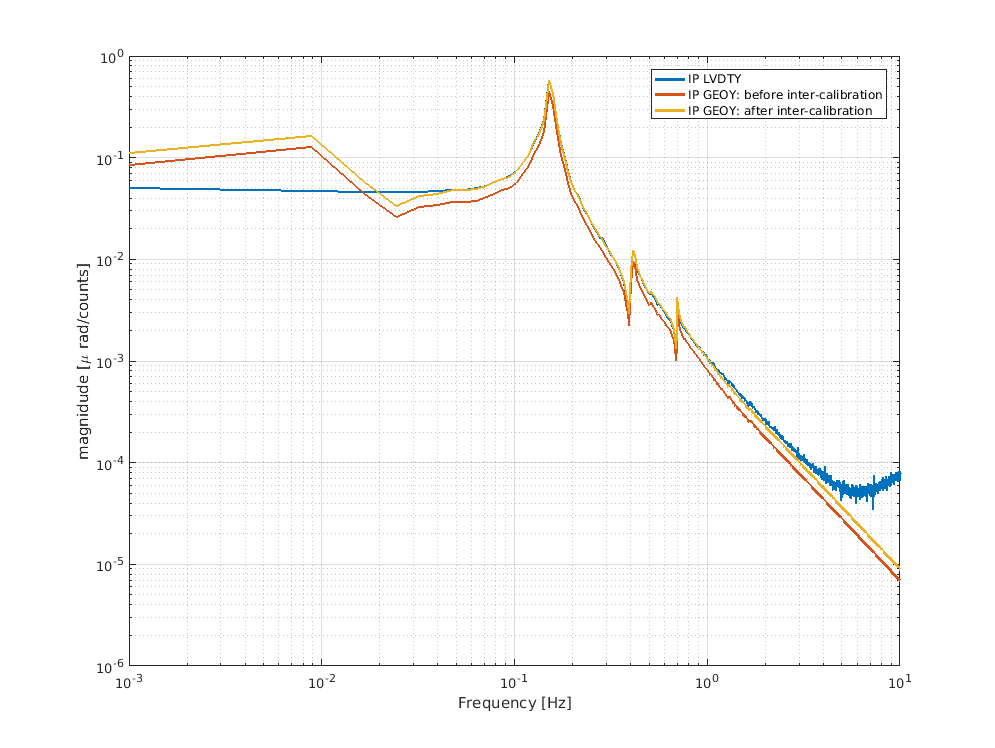
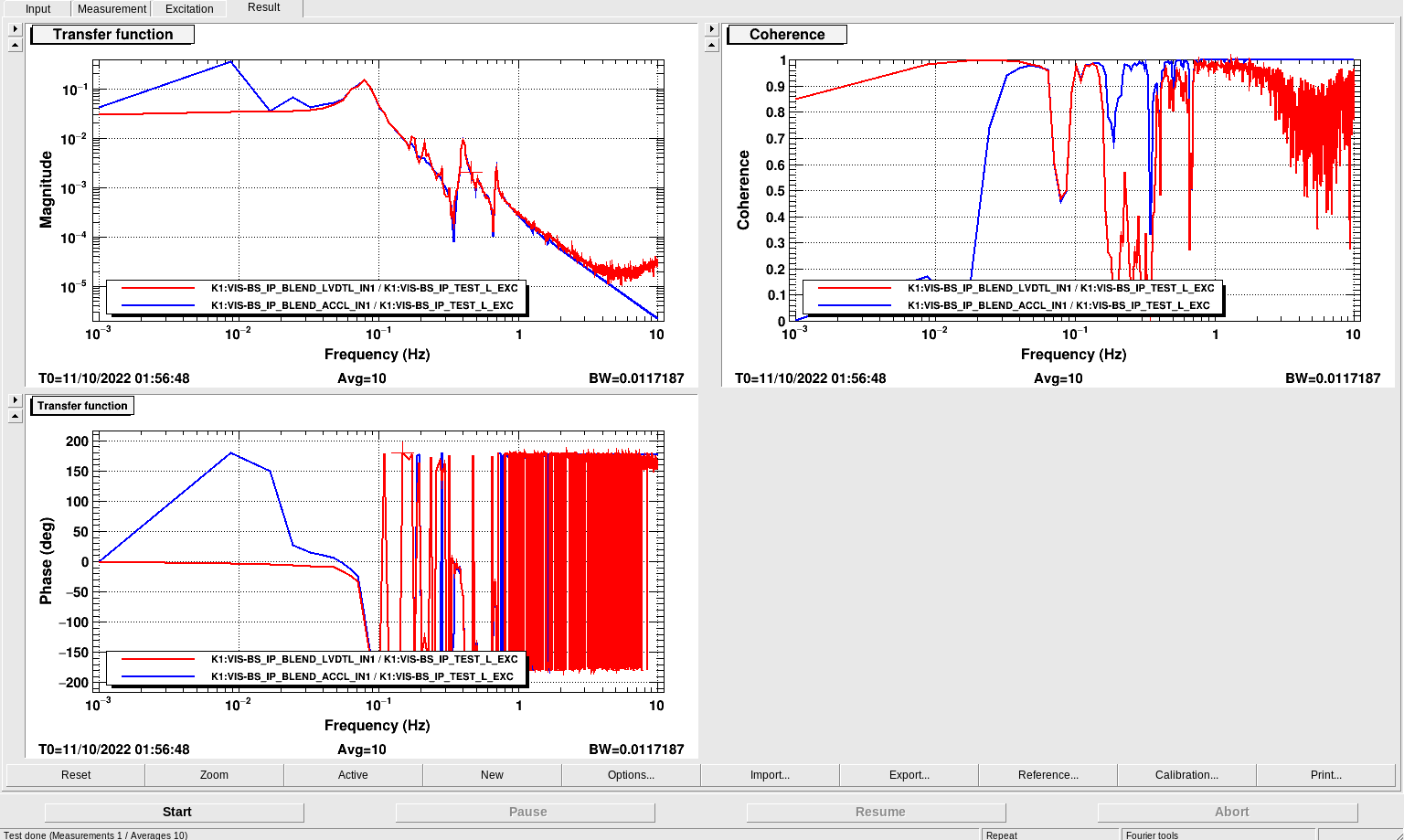
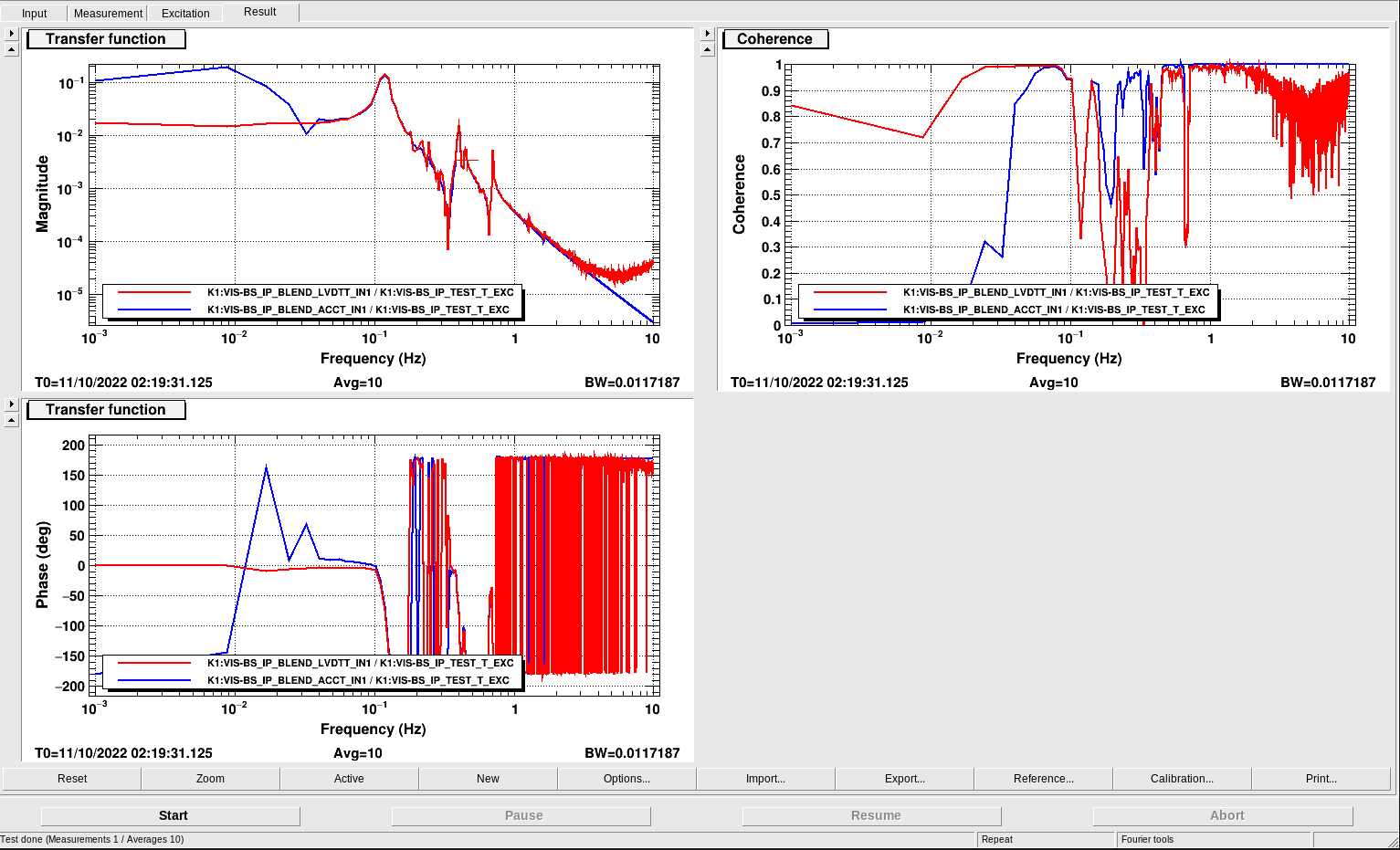
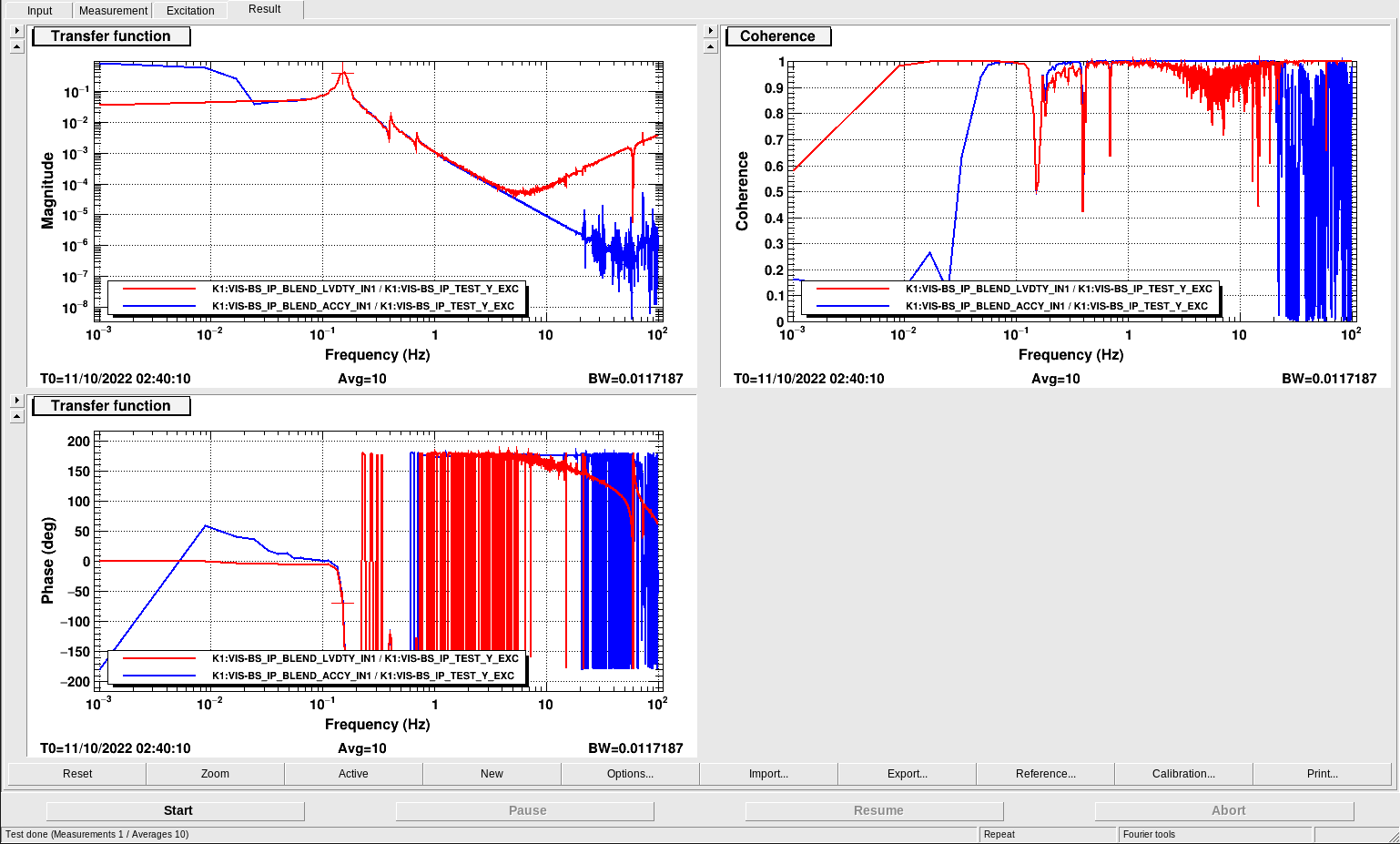
We realized the geophone degrees of freedom had large coupling with respect to each other (see Fig. 6). Therefore, we did diagonalization using the same method as for the LVDTs (see klog 22336).
- First, we set the matrix ACC2EUL to the geometrical matrix (shown below and calculated with the script already linked from the medm screen).
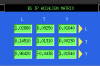
- Then, we calculated the diagonalization matrix and wrote it in ACCALIGN. The matrix is shown in a picture below.
ACC2EUL =
[[ 0.64395 , -0.4714045 , -0.172546 ],
[ 0.172546 , 0.47140452, -0.64395 ],
[ 0.563539 , 0.563539 , 0.563539 ]]
Comment on the results will follow.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}