Abstract:
For reducing the residual motion of BS, especially yaw, I implemented hierachical angular control of BS with high bandwidth (~5Hz).
New filters seem working well and the residual motion is less than 1 urad for both pitch and yaw.
Detail:
BS large residual motion sometimes disturbed our interferometer work, so I started to solve the problem.
Since the actuator range of BS is smaller than SRs, we cannot use the same high-bandwidth control filters for yaw like SR3.
So, I decided to implement hierachical control by using TM and IM.
Cross-over frequency between TM and IM controls are designed as 0.5 Hz.
UGF of controls are set as 5 Hz.
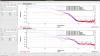
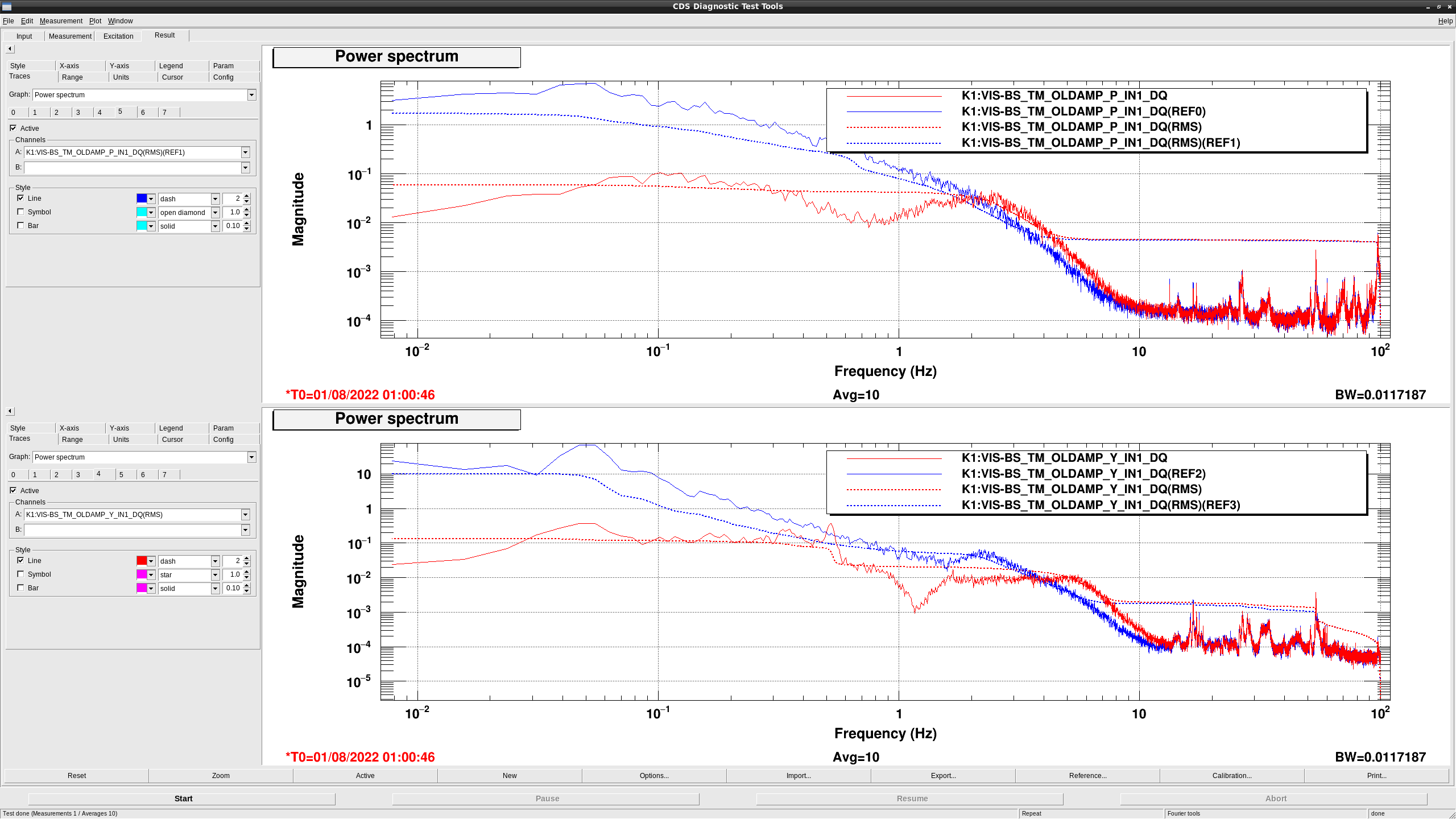
Figure 1 shows the spectra of residual motion of BS.
As you can see, residual RMS was reduced by more than 10 times.
Now, RMS values are less than 1 urad, which is enough to start initial commissioning.
Note:
Thanks to hierachical control, TM actuator output is now less than several thousands, which is about 10% of full actuator range.
So, this control can probably work even in the louder condition like one of the flanges are opened.
{kind=link}