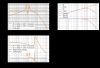
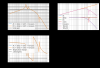
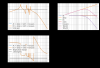
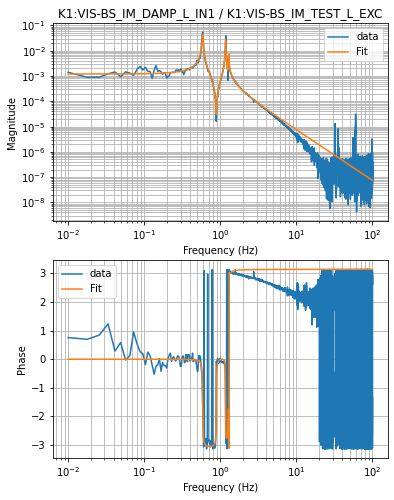
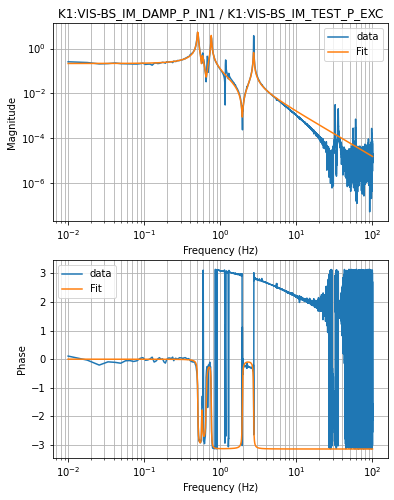
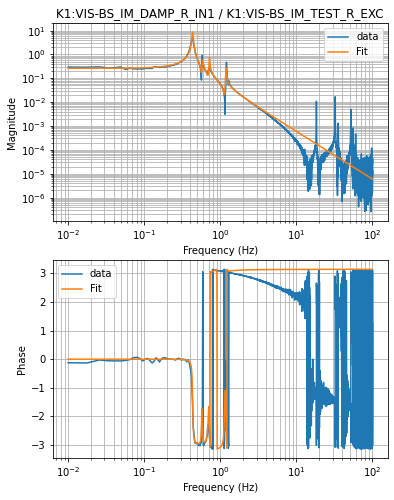
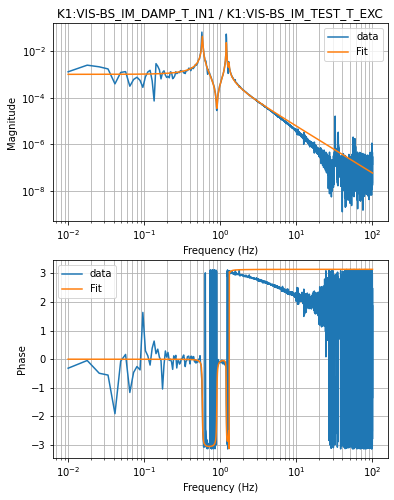
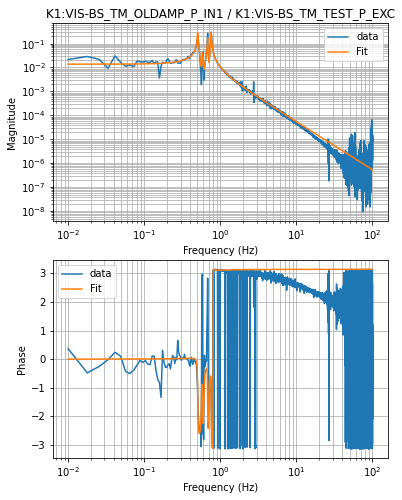
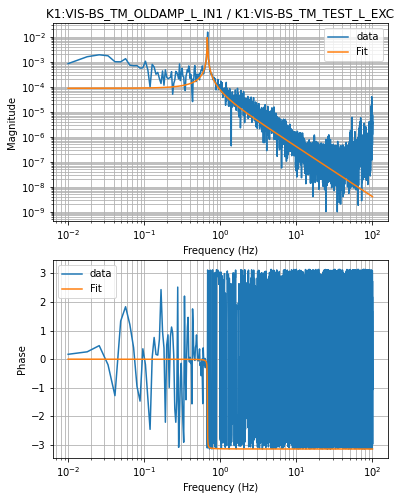
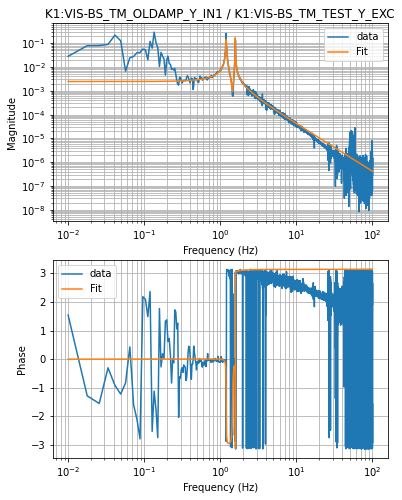
Fig. 1-9 shows the IM and TM transfer function models.
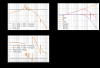
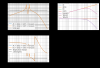
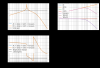
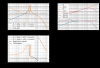
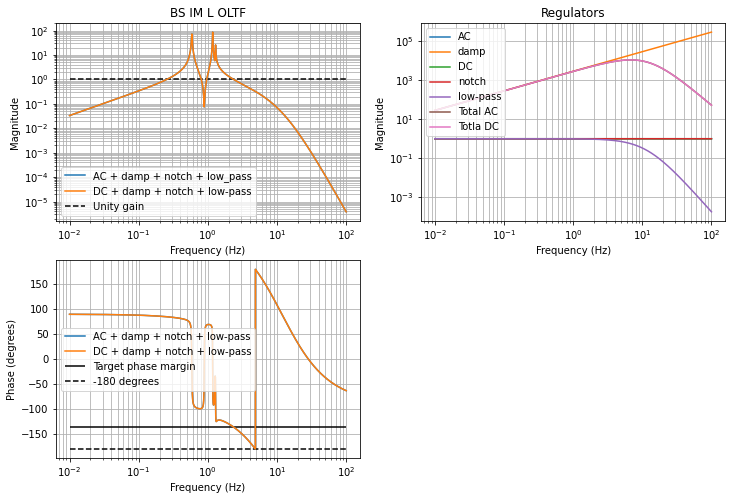
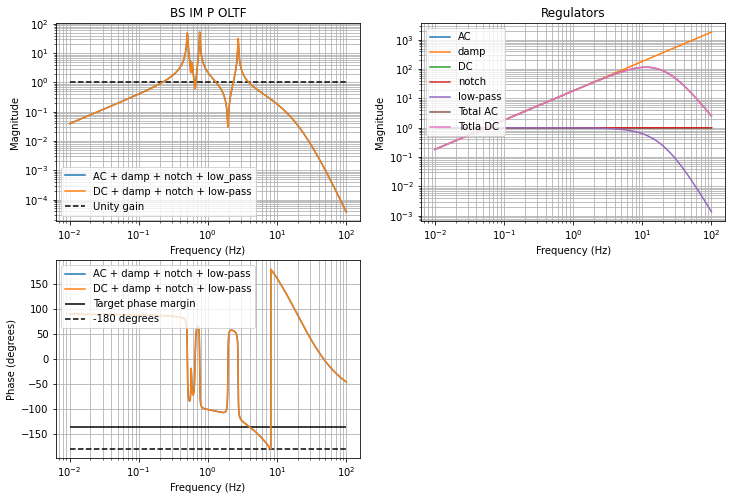
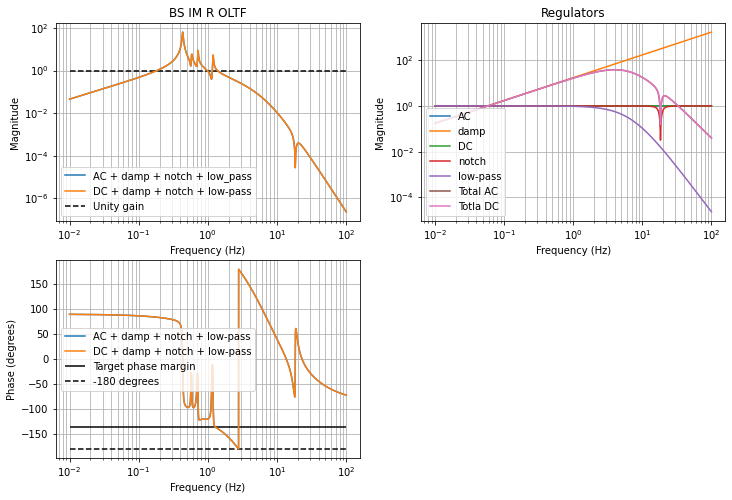
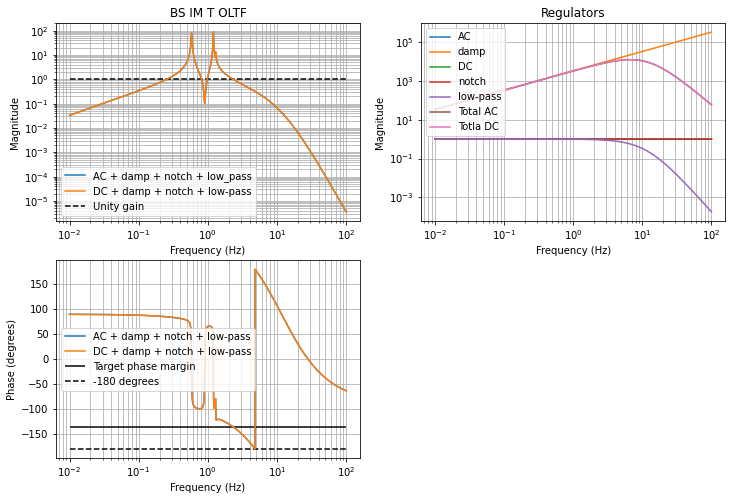
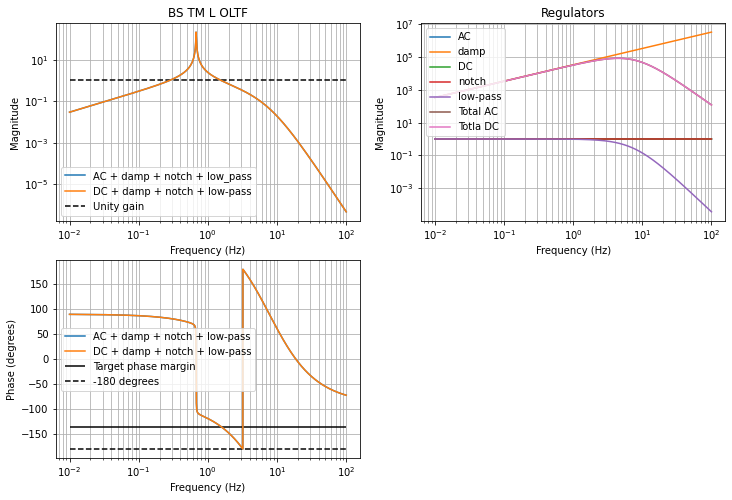
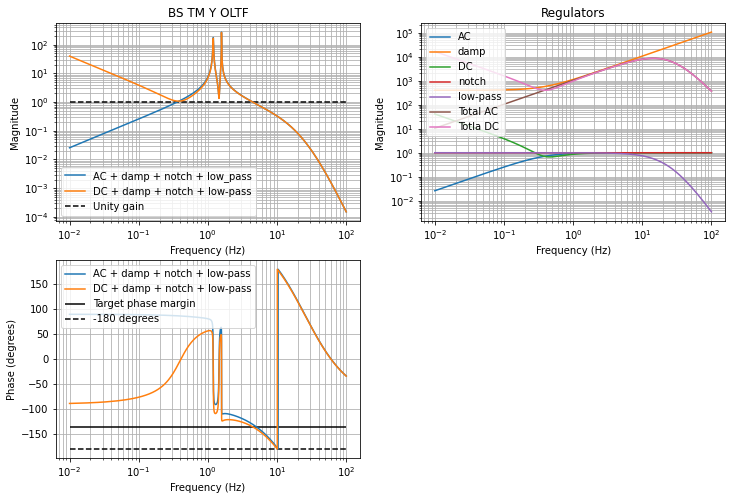
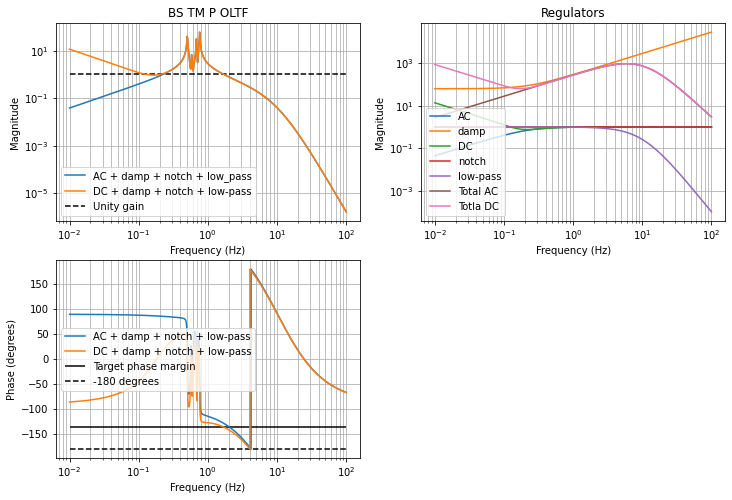
Fig. 10-18 shows the OLTFs and the filters.
The controls for IMs are simple velocity damping filters with 4th order low-pass optimized for critical damping and 45 degrees phase margins.
The TM controls all come DC controls.
The TM yaw control was particularly problematic and there's a spurious ~46 mHz oscillation. This is also observable in the transfer function measurement in Fig. 8, which was being ignored during the fit.
I had to manually set the UGF of the integral control to 0.4 Hz so the gain at ~46 mHz becomes much higher. This however only suppresses the yaw peak-to-peak to around 2-4 urad (was something like 40 urad with my typical control filters).
The same oscillation occurs also in the IM stage.
The Guardian was tested and it worked bringing BS to the ALIGNED state.
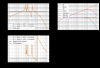
Prior to the control work, the SENSALIGN matrix at the TM was also changed to minimize some cross-coupling.
K1:VIS-BS_TM_SENSALIGN:
[[ 0.99682099, 0.07718638, -0.04371401],
[-0.04095595, 0.99441067, -0.01538625],
[-0.00125307, 0.03042447, 0.99889156]]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}