Here's just mostly notes to myself before fixing the ETMY.
After the height adjustment work and F1 damping adjustment work, several things changed for some reason.
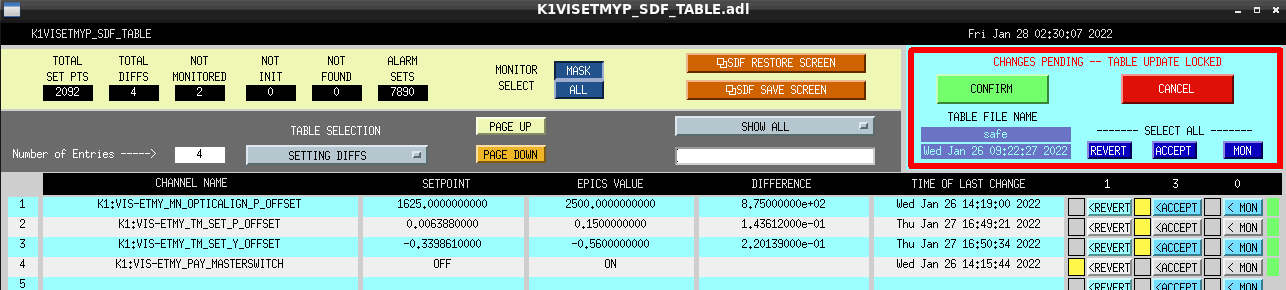
The position of the suspension in various DoFs changed and as usual I tried to offload them using the stepper motor.
Offloading BF Y is particularly difficult for some reason. It was shifted by a few thousand urad and I tried to use the F0 yaw stepper to move it towards zero.
However, it stopped at around -3400 and I couldn't move it forward anymore. Luckily the actuation range is large enough for me to engage the yaw DC control.
The same goes for F1 but in the end I can offload it when other GAS DoFs are controlled.
BF L shifted from -532 to 815 um (Other BF DoFs probably have shifted as well but I didn't record them)
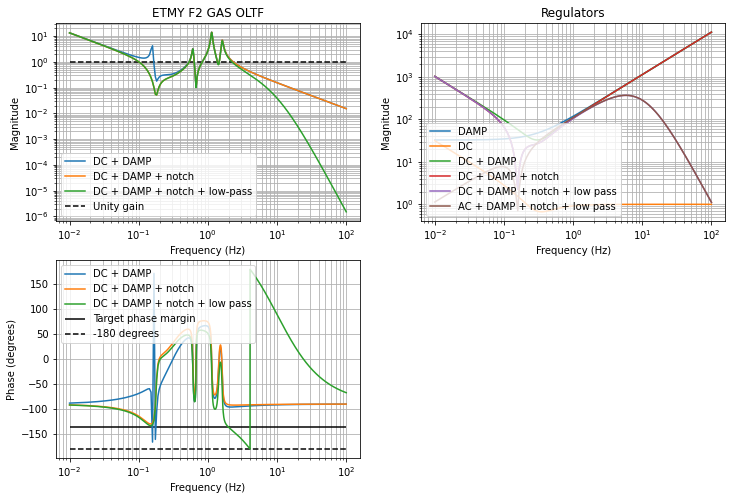
F1 control can be engaged but it injects a huge amount of high-frequency noise to which it might start saturating the coils. This needs to be revisited.
I use the BF yaw pico motor to center the TM oplev and discovered a huge 60 mHz oscillation in horizontal channel that cannot be controlled even with MN controls.
With the MN2TM DC it only seemed to amplify the oscillation for some reason.
While the ETMY is oscillating around the good oplev values, we turned on the green laser and see if we can see the reflection at EYA as well as using the POS refl PD, and we can't.
This indicates that the ETMY may have been severely misaligned now and we need to recover it.
I will do a healthcheck of the suspension soon to see if there's anything indicative.
Edit: Takahashi-san said that the BF secondary coils are shifted so the position of the BF may appeared shifted and the LVDT position cannot be used as references.
But this doesn't change that fact that we may have lost the oplev reference.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}