I measured the transfer functions from TEST_{L, T, Y} to LVDT L, T, and Y and observed some sensor coupling from L, T to Y at the L, T resonances.
I proceed to reduce the couplings using the LVDTALIGN matrix. This was done in an iterative way but I won't go into details.
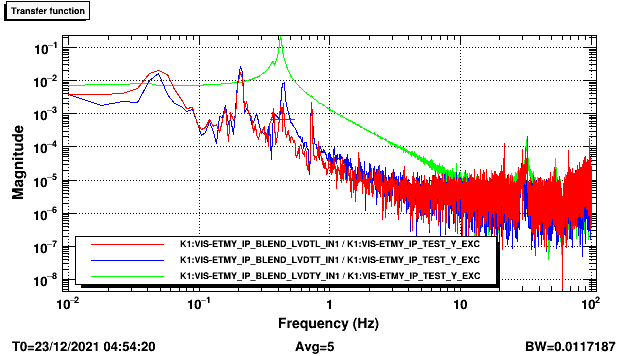
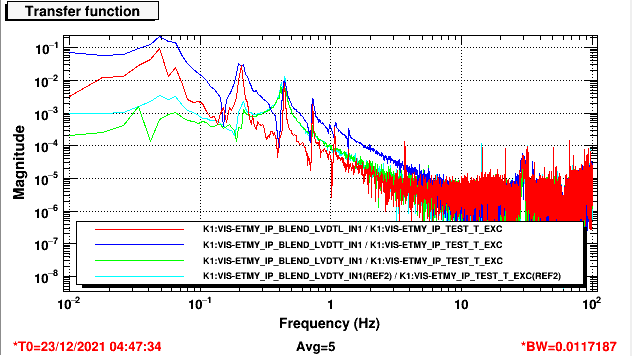
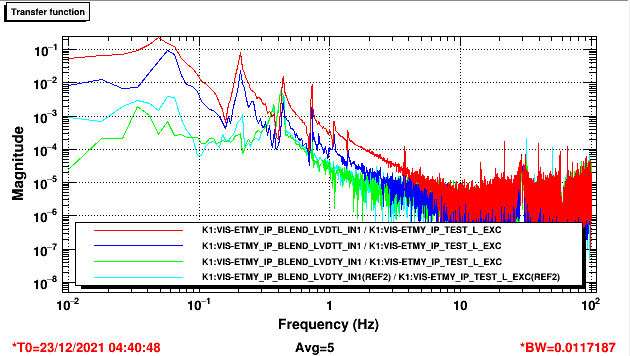
The transfer functions are shown in Fig 1-3. Reference plots are L/T actuation to LVDT Y readout before the diagonalization.
As can be seen, the L2Y and T2Y coupling reduced at the IP resonances (~50 mHz).
It's unclear whether there's strong Y2L and Y2T coupling because the yaw frequency (~0.416 Hz) is very close to one of the pendulum modes (~0.440 Hz). (Fig. 1)
But the coupling ratios are small anyways so it might not matter.
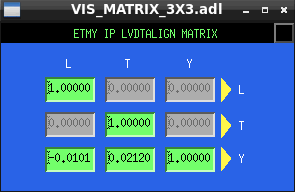
The new LVDTALIGN matrix is shown Fig. 4.
Calculation was done in /kagra/Dropbox/Subsystems/VIS/vis_commissioning/etmy/notebook/diagonalization/ip_lvdt.ipynb

{kind=link}
{kind=link}
{kind=link}
{kind=link}