Abstract:
I tested the damping loop with MN OpLev for R, P, Y degrees of freedom.
P and R loops seem good but Y llop need to be considered.
Detail:
I measured the transfer function from MN_TEST_{R,P,Y}_EXC to MN_OLDAMP_{R,P,Y}_IN1 and designed damping filters for those degrees of freedom.
For desingning of damping filters, I made each PLANT (TF of suspension) in the FM10 of MN_OLDAMP_{R,P,Y}.
This transfer function is the transfer function without PS damping.
Damping filter was designed as engaging without photosensor loop because I would like to turn off PS loop if MNOLDAMP will be succeeded.
The filter is designed at FM1 with the name of "damp_temp" because they are not fully checkd at this moment.
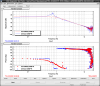
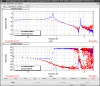
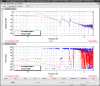
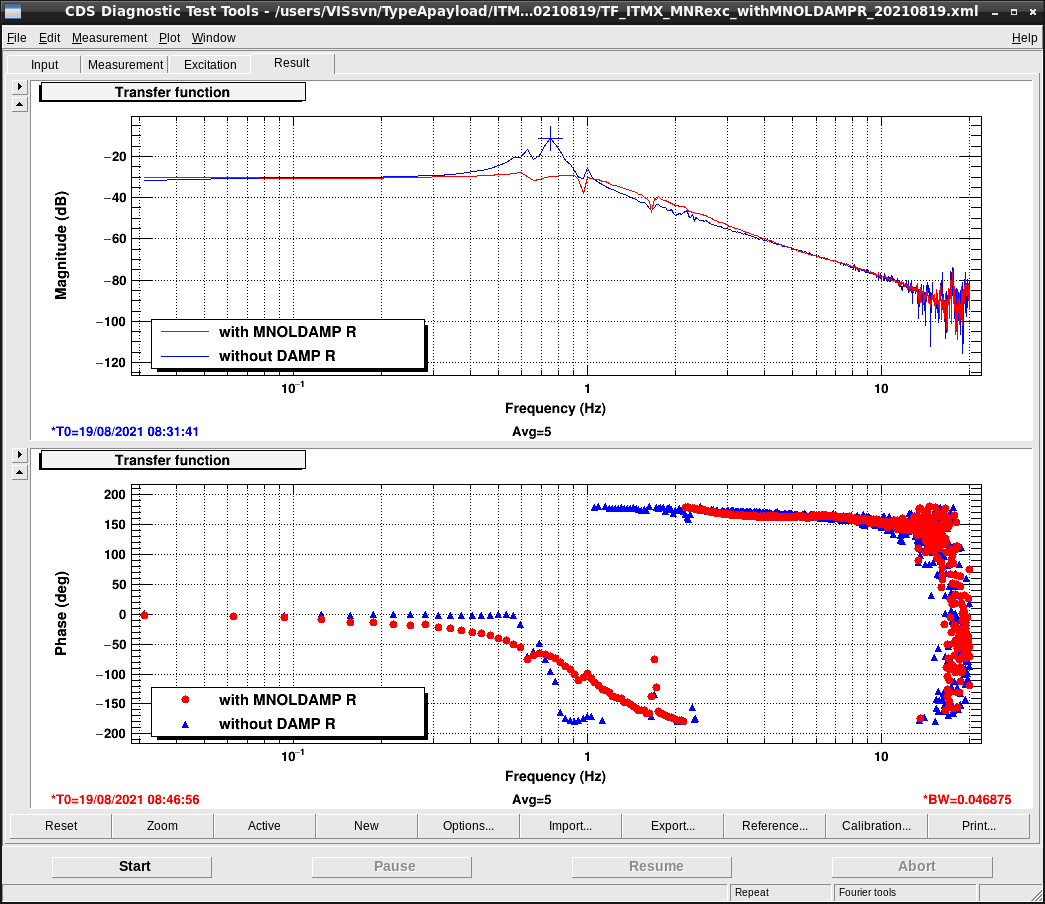
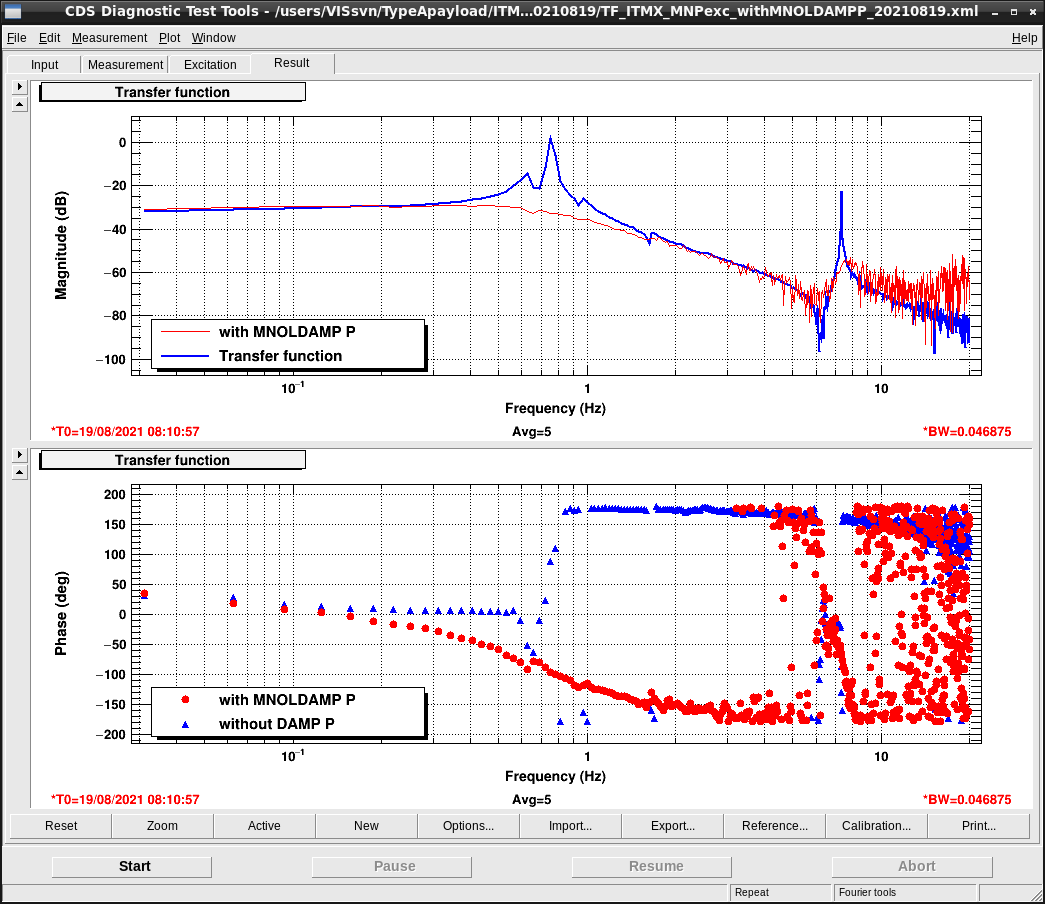
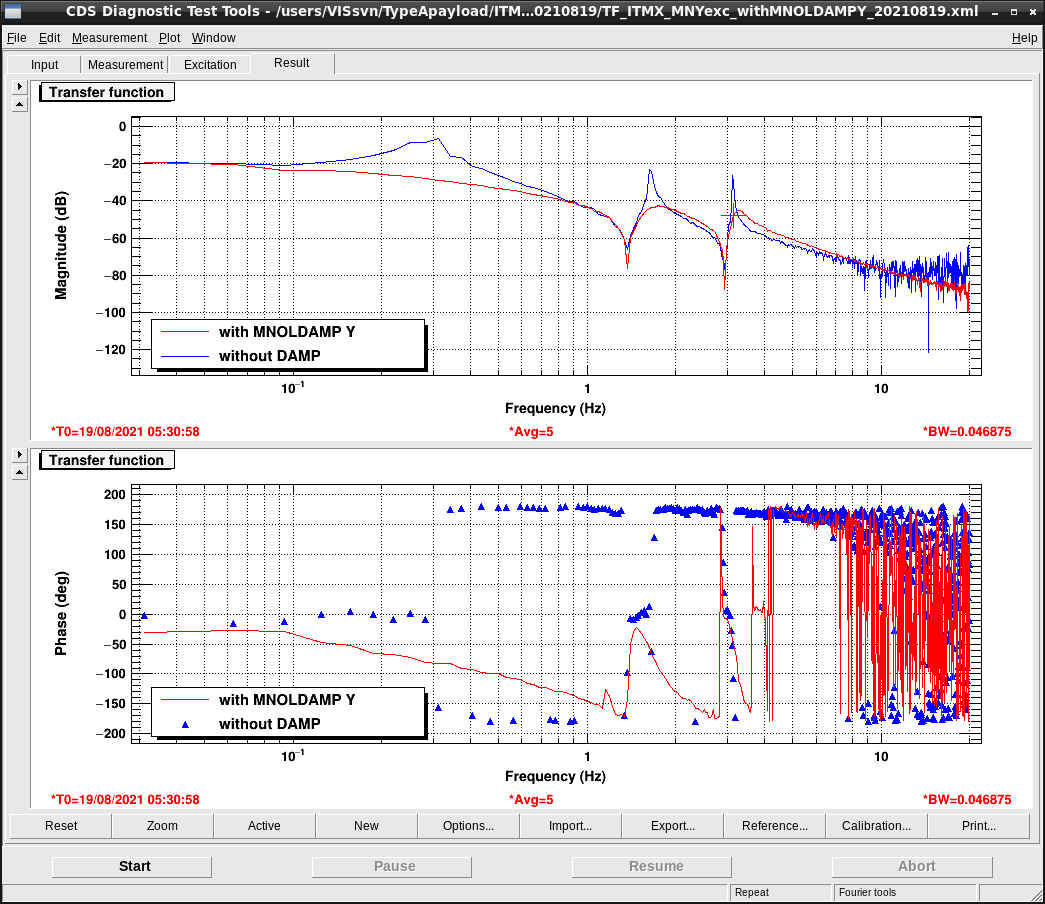
Figure 1, 2, and 3 show the comparison of the transfer functions with (red) and without (blue) control loops for R, P, and Y, respectively.
Allpeaks below 10 Hz are well damped in all 3 degrees of freedom.
During this work I accepted the SDF related to MNOLDAMP filters (ramp time and filter setting).
Since I have no time to check the long-term stability today, I disengage MNOL loops and keep the nominl ALIGNED state tonight.
Note:
In fact, current damping filter for YAW was kicking the recoil mass chain at 4.1 Hz, which is its resonant freuency.
This mode cannot be damped with MN OpLev because we cannot see any peak in the transfer function (fig 3).
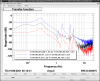
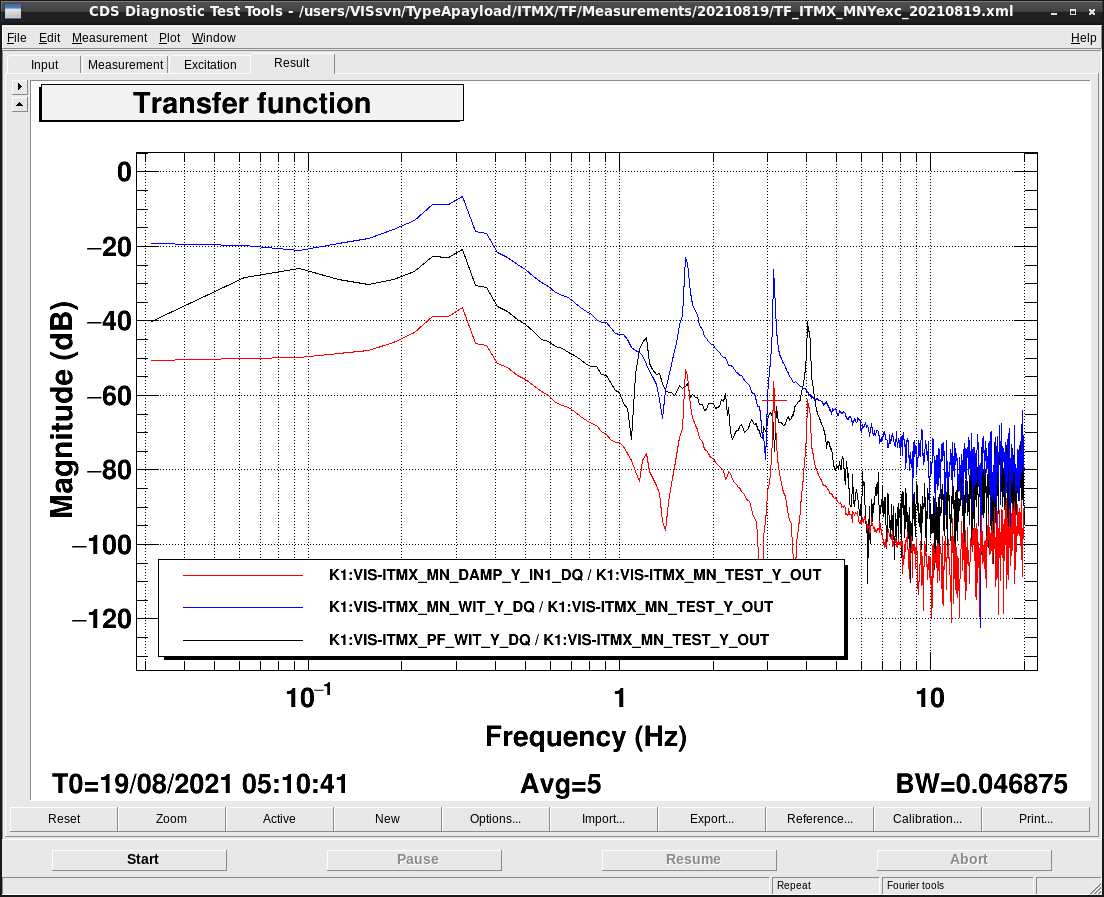
However, this mode can be seen in PF OpLev because PF stage obtined the back action from the recoil mass chain.
Figure 4 show the transfer function from MN_TEST_Y_EXC to PS (red), MN OpLev (blue), and PF OpLev(black).
As you can see in the graph, PD OpLev has the peak at the same frequency of PS peak, which cannot be sen in the MN OpLev.
So, next step is to us PF OpLev, which will be implemented in the maintanance tomorrow.
Data taken today was stored at /users/VISsvn/TypeApayload/ITMX/TF/Measurement/20210821/
{kind=link}
{kind=link}
{kind=link}
{kind=link}