C. Hirose, K. Tanaka
### Choose DOFs and made DOF sensors
Based on Hirose'-san s previous sensing matrix results (see klog 17414), we decided on the combination of sensors that are most sensitive to the DoF in each of the MCE, COM and DIF modes between MCI and MCO of YAW direction. The sensing matrix shows that the REFL WFS is equally sensitive to MCE motion and {COM. DIF} modes motion, while the MCE TRANS has greater sensitivity to MCE motion than the other degrees of freedom. Therefore, the motion of the MCE is first detected by MCE TRANS DCQPDs, and then the motion of the MCE is controlled with MCE TRAMS DCQPDs. Then, in its control band of MCE angular motion, the motion of the MCE becomes small, and the REFL WFS can be used to detect the motion of the {COM, DIF} modes. The following is the summary.
YAW
- DOF1: REFL WFS1 - 0.7675*REFL WFS2 -> COM YAW
- DOF2; 0.5648*REFL WFS1 + REFL WFS2 -> DIF YAW
- DOF3: MCE TRANS DCQPD1 + 0.7212*MCE TRANS DCQPD2 -> MCE YAW
### model
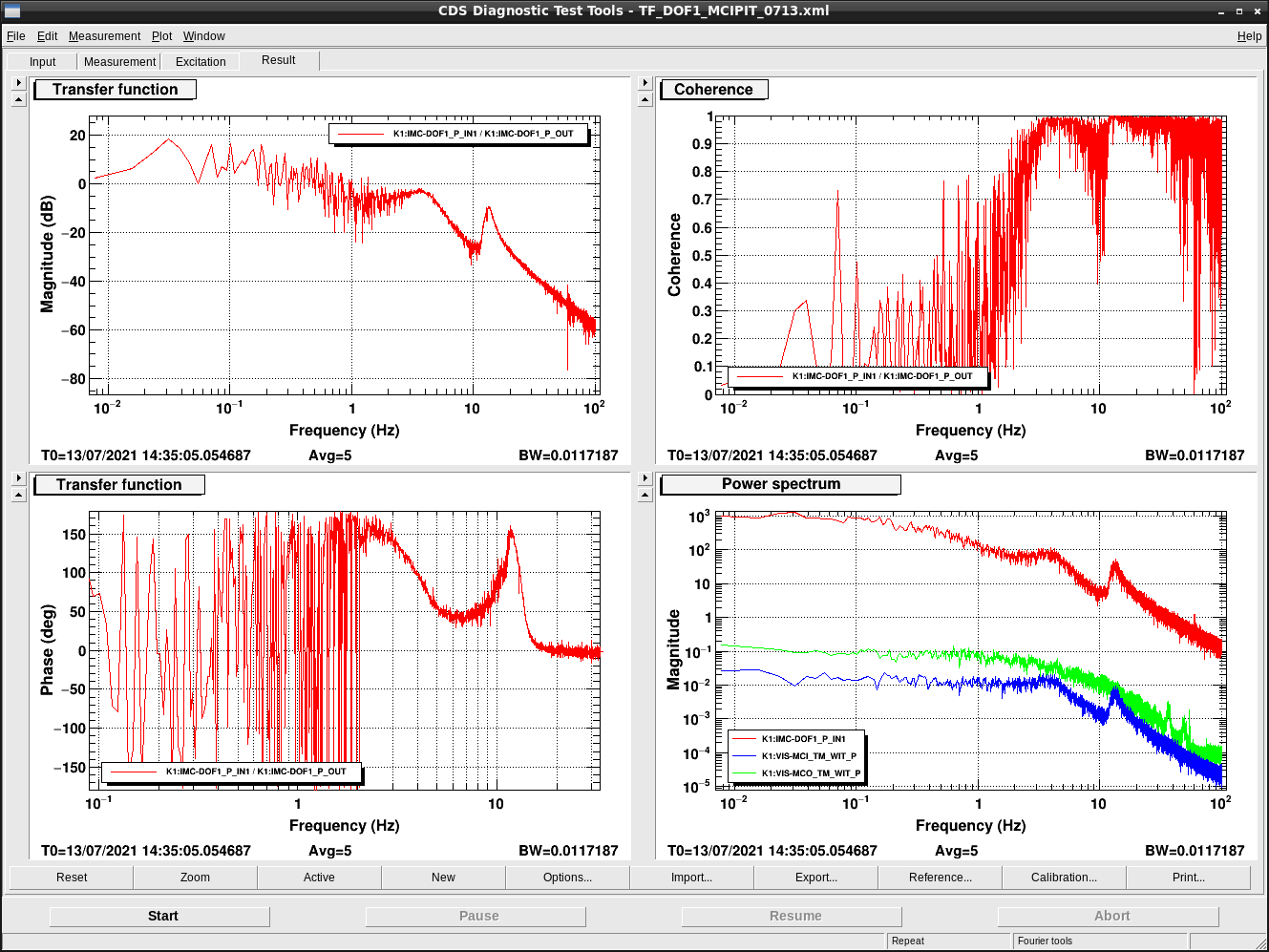
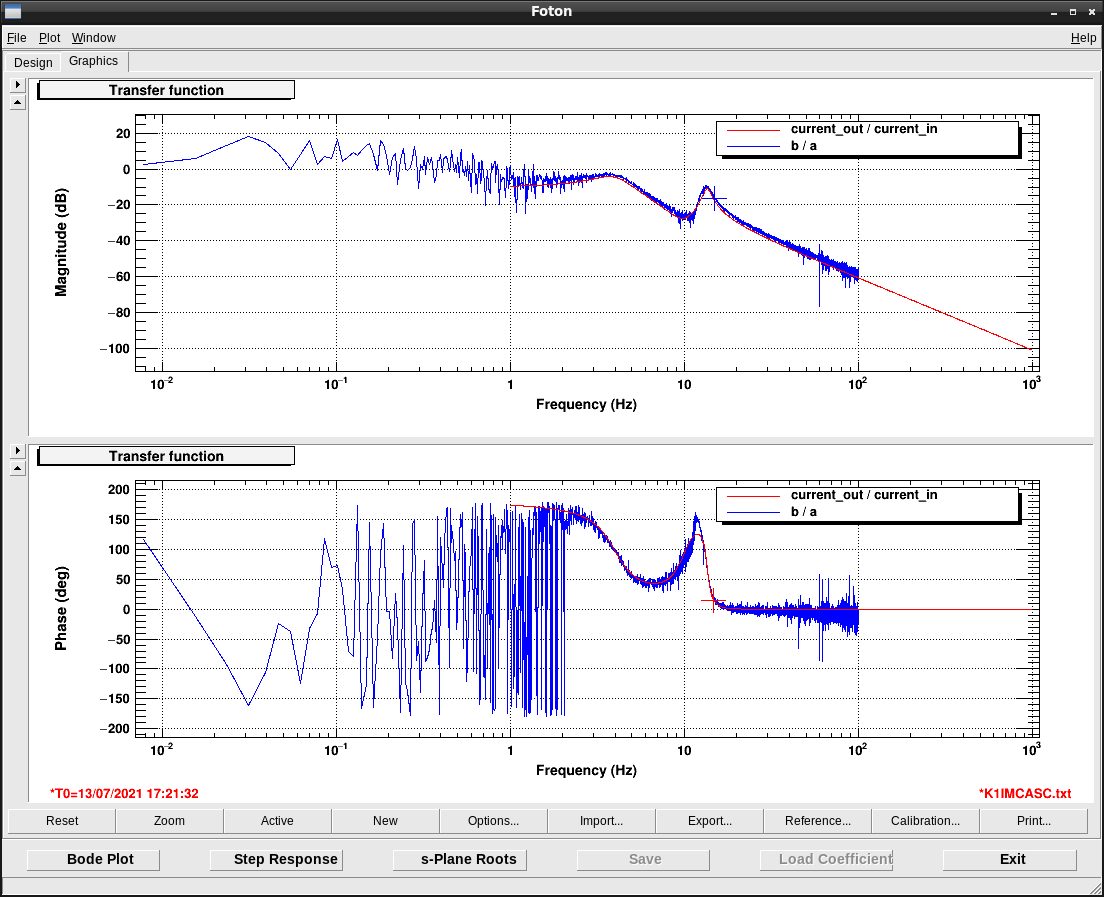
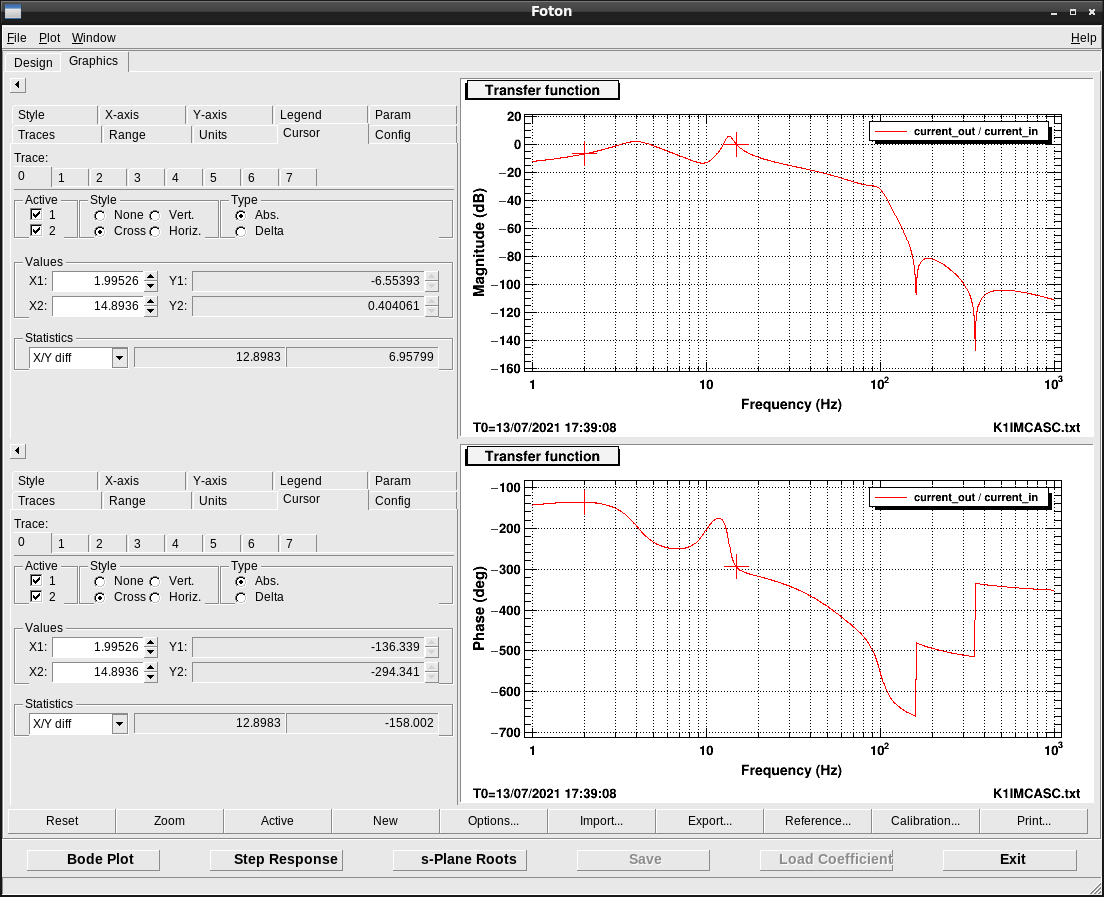
Using the above sensor, the transfer function from A to B was measured by inserting an excitation signal, as shown in Fig. 1. We created a model of the transfer function by using a zpk filter to visually match the measured transfer function. For example, in the case of COMYAW, it was created as shown in Figure 2. The measurement results for the other degrees of freedom are placed in /users/Commissioning/data/IMC/2021/TF_sup
### Open-loop TF
By using the models of the measured transfer functions, we create filters for controlling the MCE YAW, COM YAW, and DIF YAW degrees of freedom. We then closed the control loop for these degrees of freedom. Fig 3, 4, 5 show the OLTFs of MCE YAW, COM YAW and DIF YAW. we summarized each U.G.F and phase margin below a table. Fig 6, 7, 8 show the angular fluctuations in each degree of freedom with and without control, as seen by the in-loop sensor and the oplev.
Looking at the COM oplev signal, it is louder on the low frequency side than it was before the control was applied. > <
| U.G.F | phase margin | |
| MCE YAW | 4 Hz | 44 deg |
| COM YAW | 3 Hz | 22 deg |
| DIF YAW | 3 Hz | 25 deg |























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}