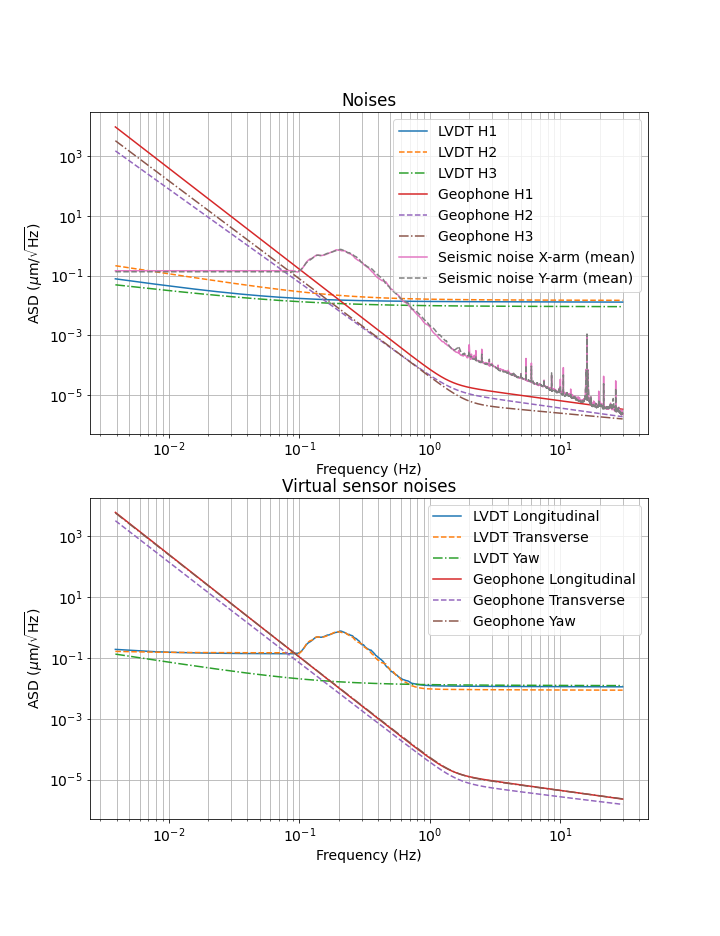
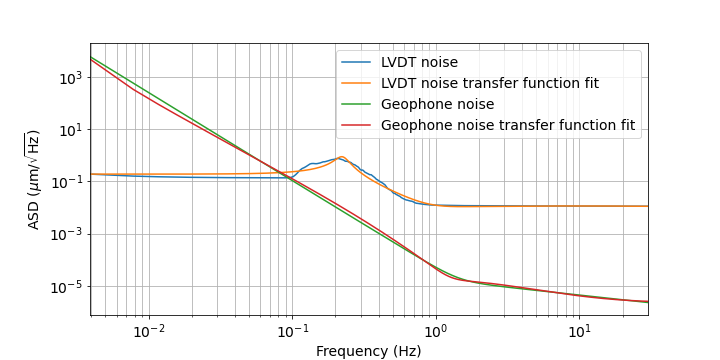
With LVDT and geophone sensor noises and sensing matrices obtained, I was able to project the sensor noises to the longitudinal, transverse, and yaw direction. Fig. 1 shows the empirical fit of the sensors noise in longitudinal, transverse, and yaw directions. Here, I assumed that the LVDTs are coupled with seismic noise. The seismic noise spectra here were the mean spectra measured by Miyo, which is available here. At lower frequencies, I suspect the measurements were dominated by seismometer noise so I make the spectra flat by setting them to the 1st or 2nd local minima. The key feature here is the microseism that is introduced in the LVDT readout noises.
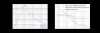
Fig. 2 shows the transfer function modeling of the LVDT and geophone readout noises in the longitudinal direction. These will be used later for H-infinity synthesis. The modeling of the LVDT noise was not visually well fitted but I don't want to fit-tune this now because this was sufficient to demonstrate the power of this method.
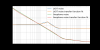
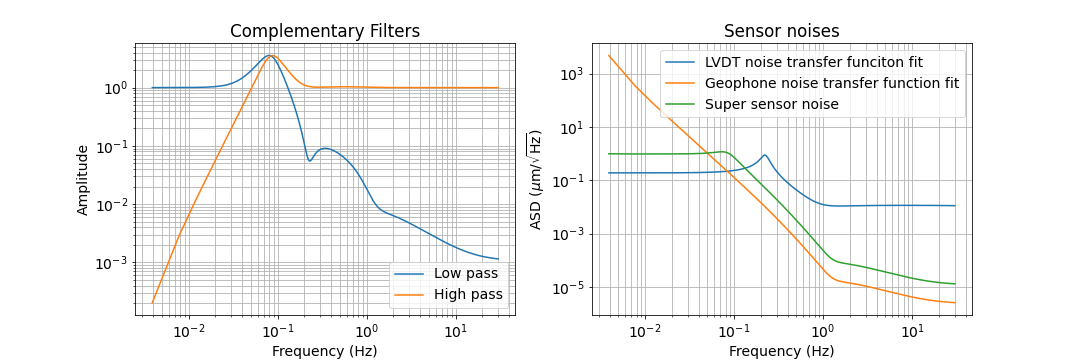
Fig. 3 shows the complementary filters synthesized using H-infinity method. The cost function is roughly equal to the log difference between the sensor noise and the lower bound of the sensors. So, it follows that the resultant super sensor noise resembles the shape of the lower bound, as shown on the right plot. Note that this super sensor noise was estimated using the transfer function models of the LVDT and geophone readout noises.
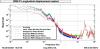
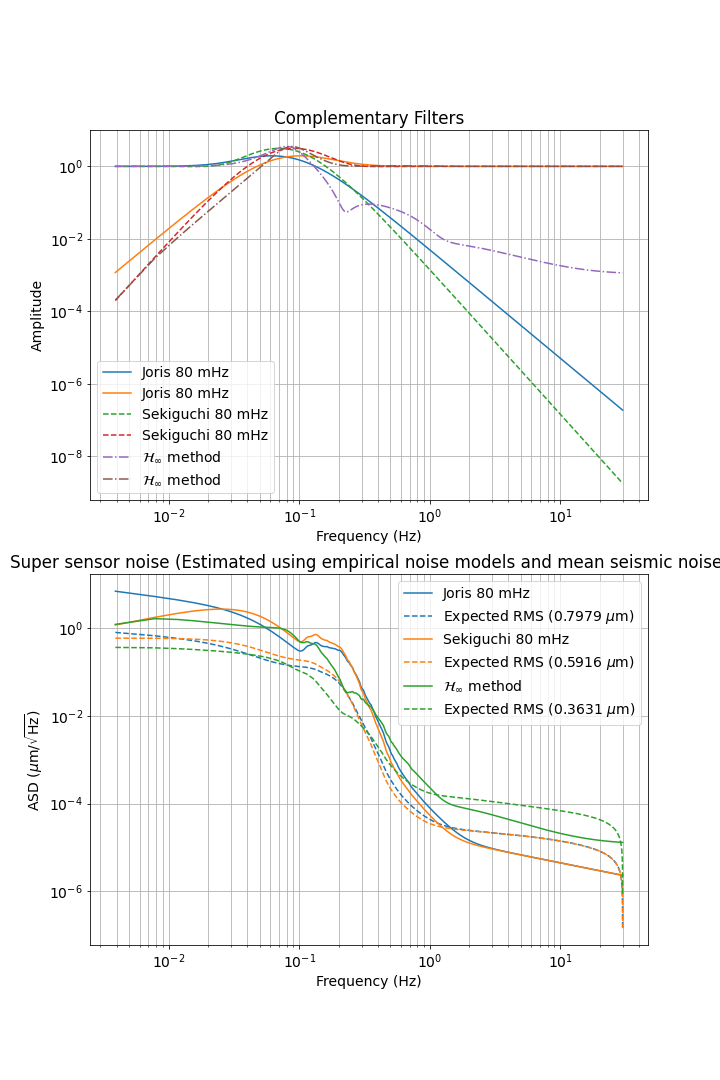
I benchmarked my complementary filters with the current ones installed (Joris' filter blended at 80 mHz I think) and also with Sekiguchi's filters also blended at 80 mHz, for good measures. The complementary filters and the super sensor noises were compared. And here, we used the empirical model (right plot in Fig. 1) to estimate the super sensor noises so they're much closer to the actual ones. The results are shown in Fig. 4. The top plot shows the filters, but it's kind of messy so it's just here for reference. The bottom plot shows the super sensor noises and their expected RMS (integrated RMS). As can be seen, the super sensor noises using the H-infinity filters have much lower expected RMS and has 1-order of magnitude lower sensitivity to seismic noise at microseism, but with the cost of higher sensor noise at higher frequencies.
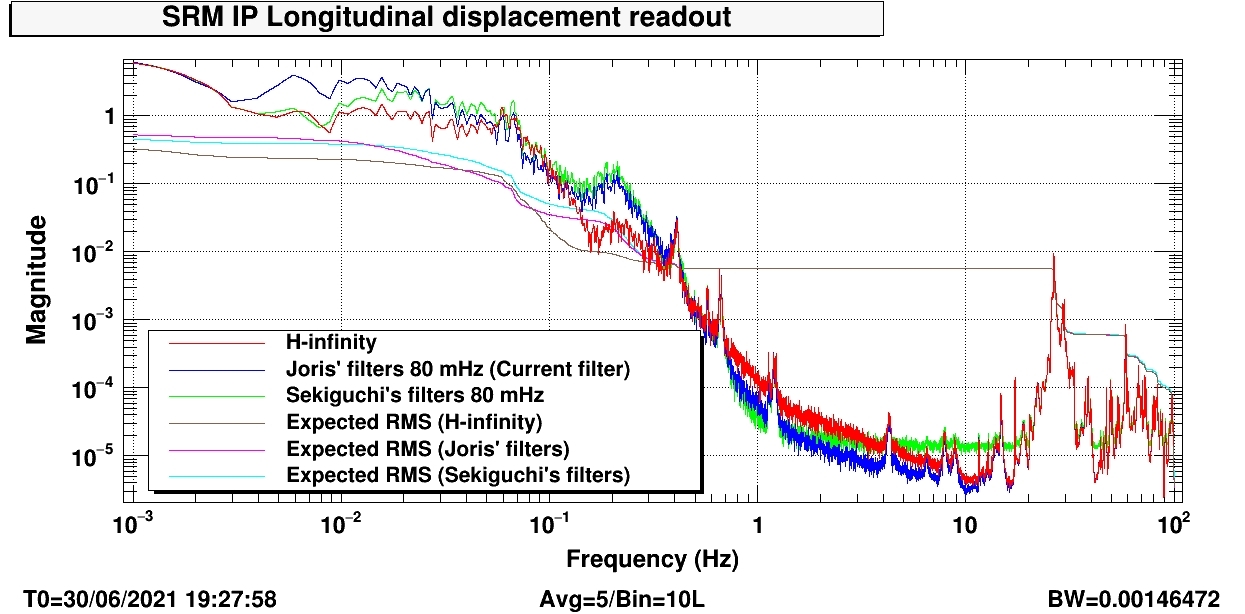
I installed all three filters into the IP and measured the free swing spectra simultaneously. The results are shown in Fig. 5. As can be seen, the results pretty much agree with the simulated ones, with the exception that the sensitivity of my super sensor at higher frequencies (say 10 Hz) isn't that much worse from that of Joris' or Sekiguchi's (Sekiguchi's was actually the worst at higher frequencies for some reason).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}