Sorry for late report.
Sensor noise measured last week on 2021-06-15.
Fabian locked the preisolator so I get to measure the sensor noise of the IP sensors. These will be useful for designing the filters for sensor correction, blending and control.
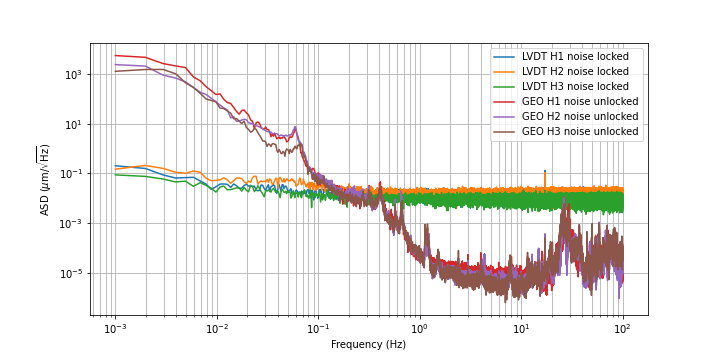
I measured the LVDT, geophone, and seismometer readouts, when the suspension is locked and unlocked.
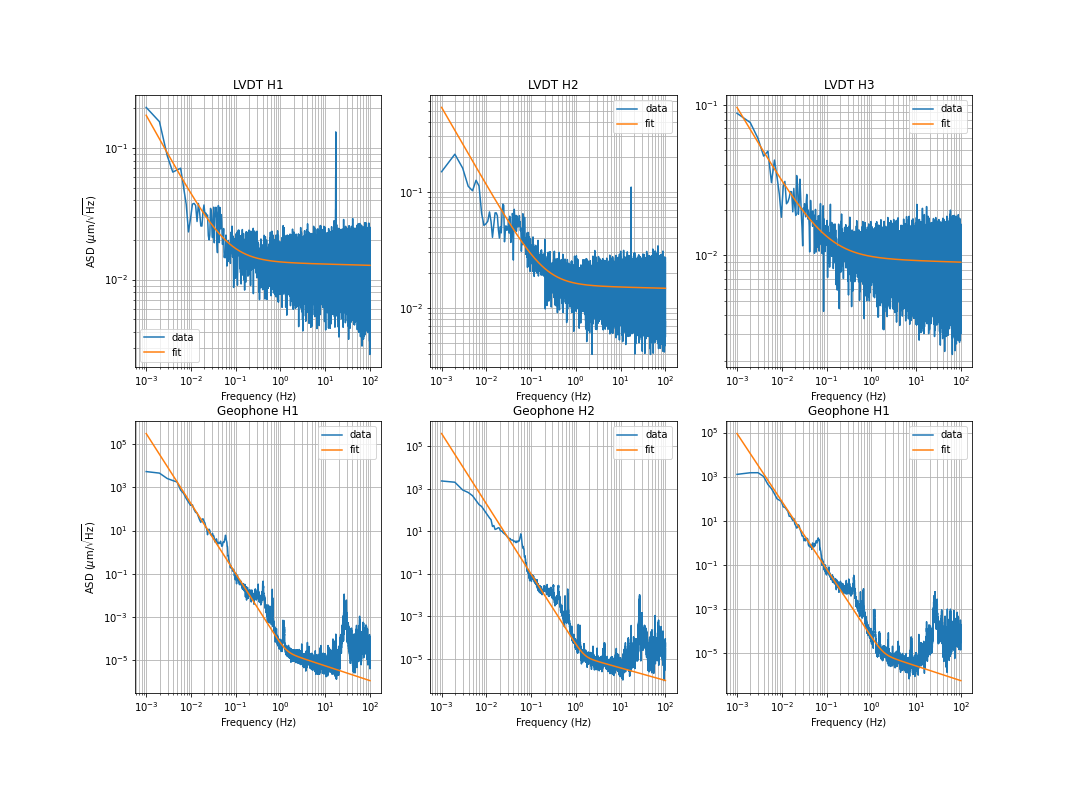
I used the locked spectra to estimating the LVDT noises, while using the unlocked spectra to estimate the geophone noise.
The fit was done using a weighted logarithmic least square cost function.
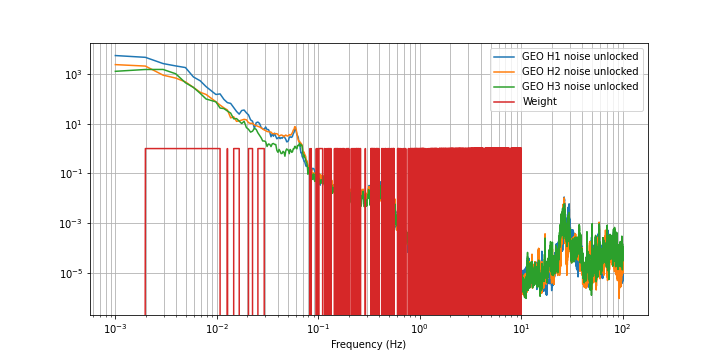
The weighting function for fitting the geophone noise is set such that when the geophone readouts have high coherence, the weight is zero, otherwise 1. This way, the motion of the suspension will be filtered out, leaving out the uncorrelated stuff which is supposed to be the noises.
General description of this method is described in the noise modeling section in https://github.com/gw-vis/vis-commissioning-tex/blob/main/main.pdf
All files and scripts (notebooks) are included in /kagra/Dropbox/Personal/Terrence/vis_comissioning/.
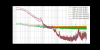
Fig. 1 shows the raw data of the LVDT and the geophone readout.
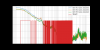
Fig. 2 shows the weighting function for fitting the geophone noises.
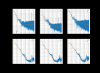
Fig. 3 shows the fitting results.
Note: I have recently intecalibrated the geophones with the LVDTs again. The geophone noises estimated here are off by a small factor.
{kind=link}
{kind=link}
{kind=link}