This work related to ticket of#342.
Takahashi, Miyo
Today, we put three geophones of ITMX on the IXV floor to evaluate these sensor noise.
This work related to ticket of#342.
Takahashi, Miyo
Today, we put three geophones of ITMX on the IXV floor to evaluate these sensor noise.
Miyo
Summary: Today we calibrated the signals of the three Geophones (H1, H2, H3) used at ITMX against the IXV seismometer. In the 0.2 - 1 Hz band where the ground is shaked by micro seismic, the three geophones agree with the seismometer to within +/-2%.
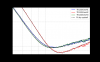
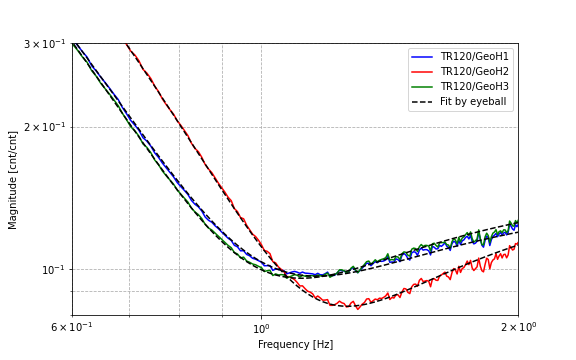
As reported in klog#16559, the three Geophones used in ITMX are installed with their connectors aligned with the +X axis of the IXV seismometer, so we decided to calibrate the Geophone signals against the seismometer signals. The method is as follows. First, we measure the transfer function between the IN1 signal of the Geophone and the EW signal of the seismometer. Note that the Geophone's IN1 is the count value of the Geophone's output signal, and the seismometer's EW signal is the count value of Trillium 120 seismometer amplified 30dB. The measured transfer function was fitted by eye ball to an error of +/-5% in the 0.2 - 1 Hz band. A comparison between the fitted transfer function and the measured data is shown in Fig. 1,2. The Python code used in the fitting was placed in my working directory "/users/Miyo/dropbox/LOG/210426/calibration.pynb".
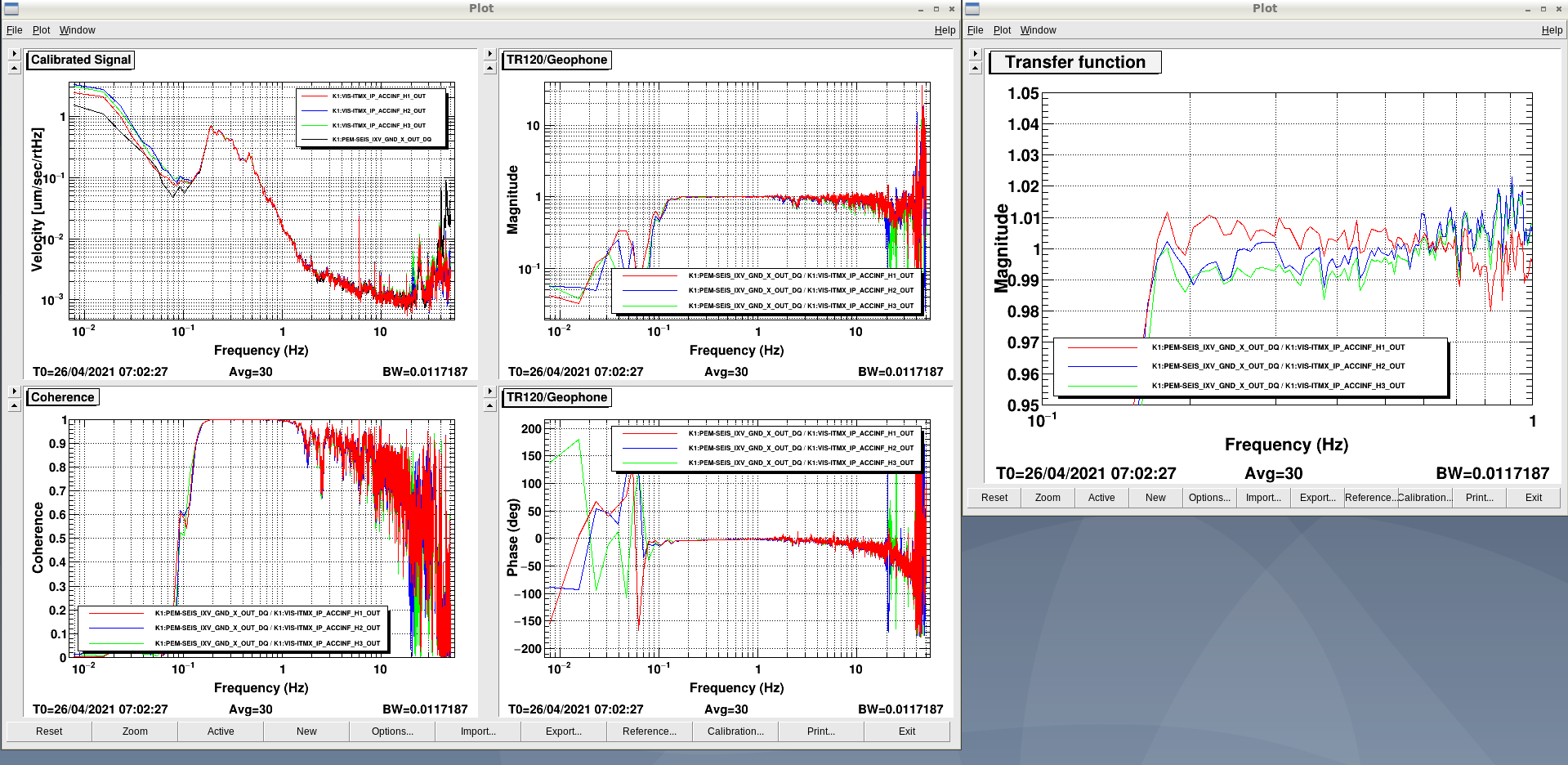
The transfer function of the Geophone and seismometer calibrated to velocity is shown in Fig. 3. The error was about +/-2% in the band of 0.2-1Hz, where the ground shakes greatly due to the micro seismic and there is enough coherence. The Geophone filter used in this calibration was committed in the following commit: https://github.com/gw-vis/userapps/commit/e9d85f950ef5aa73f14919cae3f23e16f48568c5.
What to do next
We will calibrate the out-of-loop Geophone called H4 in the same way. Once that's done, we'll use the differential signal between the Geophones to evaluate the noise level.
Relationship between the serial number and sensor name is here.
| S/N | Name | |
| 24-195 | Geo01 (ACC_H1) | |
| 29-197 | Geo02 (ACC_H2) | |
| 25-196 | Geo03 (ACC_H3) |
Miyo
Summary
1. H4 calibration
We did. please see the diaggui file in /users/Miyo/dropbox/LOG/210427/itmx_geohone.xml.
2. Noise level estimation for H1,2,3 Geophones
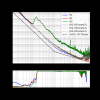
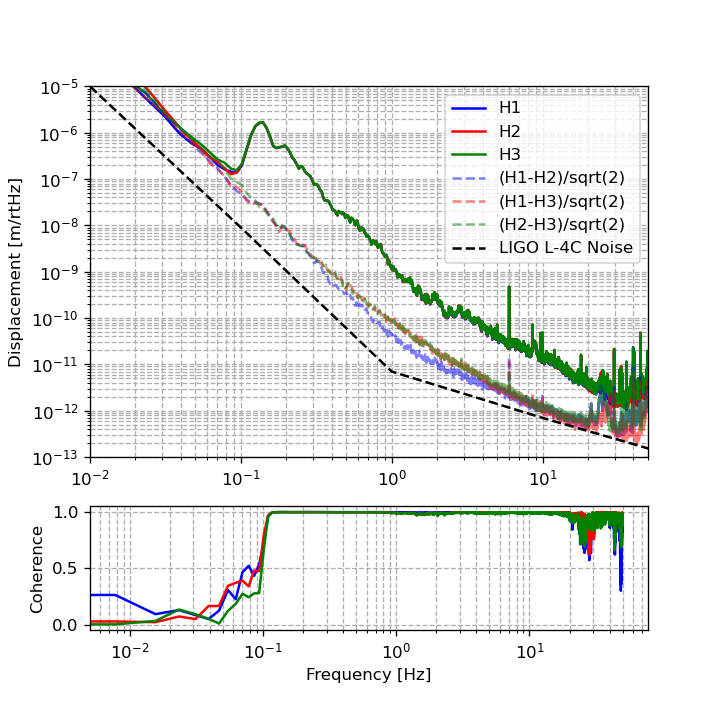
The noise level was estimated by measuring the differential signal between the each signal of Geophones placed in the same location as we reported in past klog entry. Since these Geophones are placed in the same location with the same orientation, the ground vibration motion is measured as an common signal with good coherence. This means that if we calculate the differential signal between the Geophones, only an uncorrelated signal left in the differential signal. This is the noise we are interested in. The measurements were performed as follows. First, in order to create the difference signal, we temporarily set the ACC2EUL matrix so that the In1 signals of the downstream ACCL, ACCT, and ACCY are H1-H2, H1-H3, and H2-H3, respectively. In this condition, the signals of H1, H2, and H3 and the difference signal were measured.
The results of the measurements and a plot of the LIGO Geophone noise[1] are shown in Fig. 1 for reference. First, comparing the three difference signals obtained from the three seismometers with each other, the overall noise level is almost the same, which is 1e-7 m/sec/rtHz at 0.1Hz. Looking at the details, the H1-H2 signal is smaller around 1 Hz than the other combinations, which probably means that the noise level of H3 is larger than the others. Furthermore, comparing these noise levels with LIGO, we can see that LIGO is one order of magnitude more sensitive at 0.1Hz. therefore, we need to investigate the cause of this, but on 04/26 we amplifired the geophone signal by 12dB with Whitening Filter and briefly checked if the signal was masked by ADC noise, but the coherence around 0.1Hz did not improve, so it is probably limited by the Geophone noise. Incidentally, the noise level found in the difference signal should be the remaining signal component due to the variation of the calibration coefficients (there is indeed a small amount of coherence between the differential signal and the individual signals), but this is only an upper limit of the noise level. In any case, we are able to measure the ground vibration with sufficient S/N above 0.1Hz, so we plan to use them to perform the Inertial Damp next.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}