With Hirata-san and Miyo-kun.
See pictures in album PR2 Remedying Work.
We proceeded to tighten all the clamps. We followed these steps:
- Tightened the weight holding clamps with a 10 Nm torque.
- At the sides of the RM, underneath the wire breakers, we put spacers between the clamped tungten wires and the RM side faces. The clamp at the +Y side was loose so we tightened a little before inserting the spacer.
- Removed outer wire locating clamps at the IM.
- Removed the coil bodies from the RM.
- Released the mirror from the RM, taking care of moving the stop screws a safe distance from the mirror.
- Placed the jack underneath the RM (Ref. 16355) and moved it up until it was clearly felt it was about to lift the RM.
- Then we lifted the RM by 2 mm in 500 um steps until the tension in the tungsten wires had decresed enough to be moved aside at the clamps level. We used the RM lower stop screws to keep it at a suitable horizontal level.
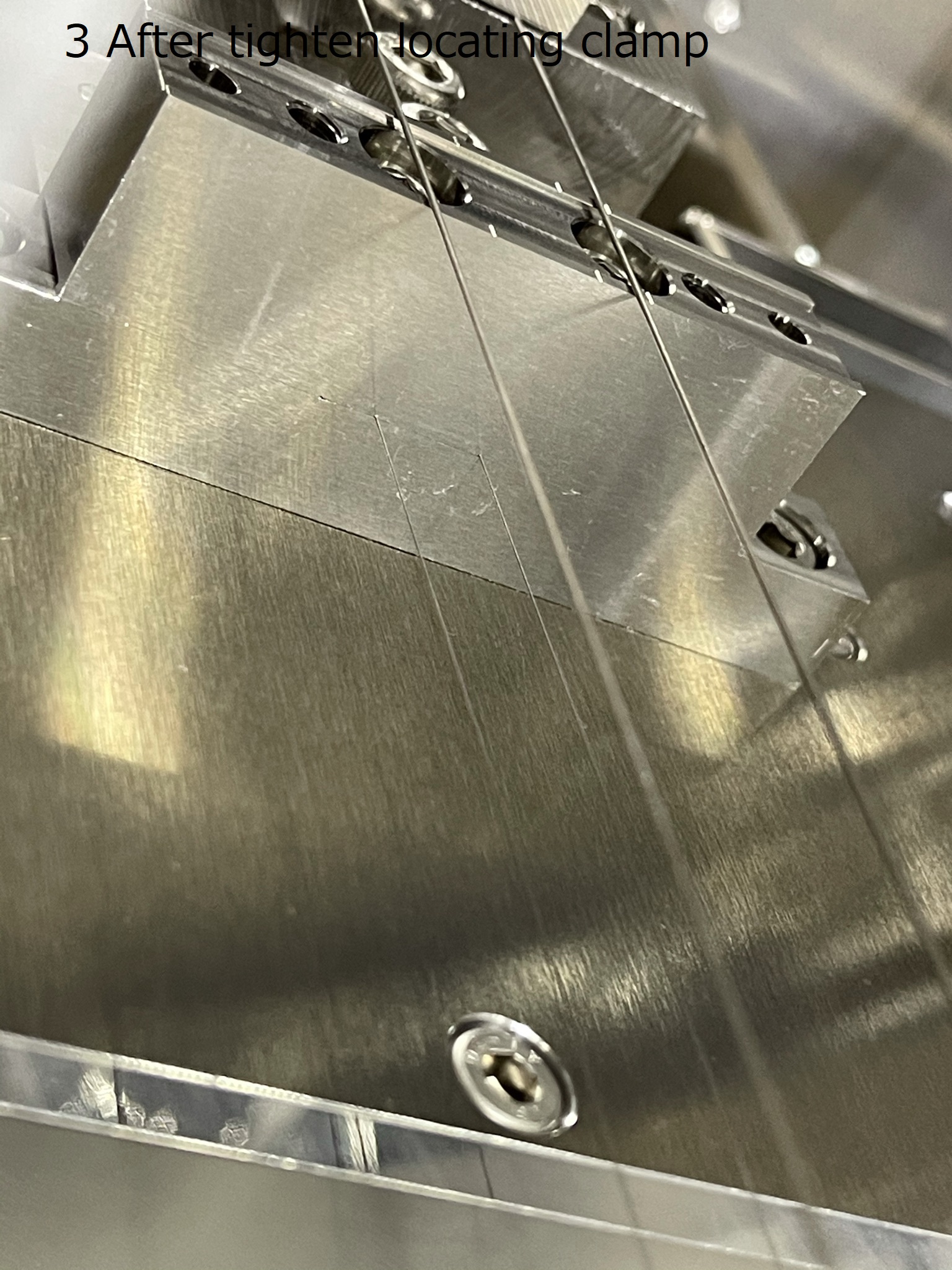
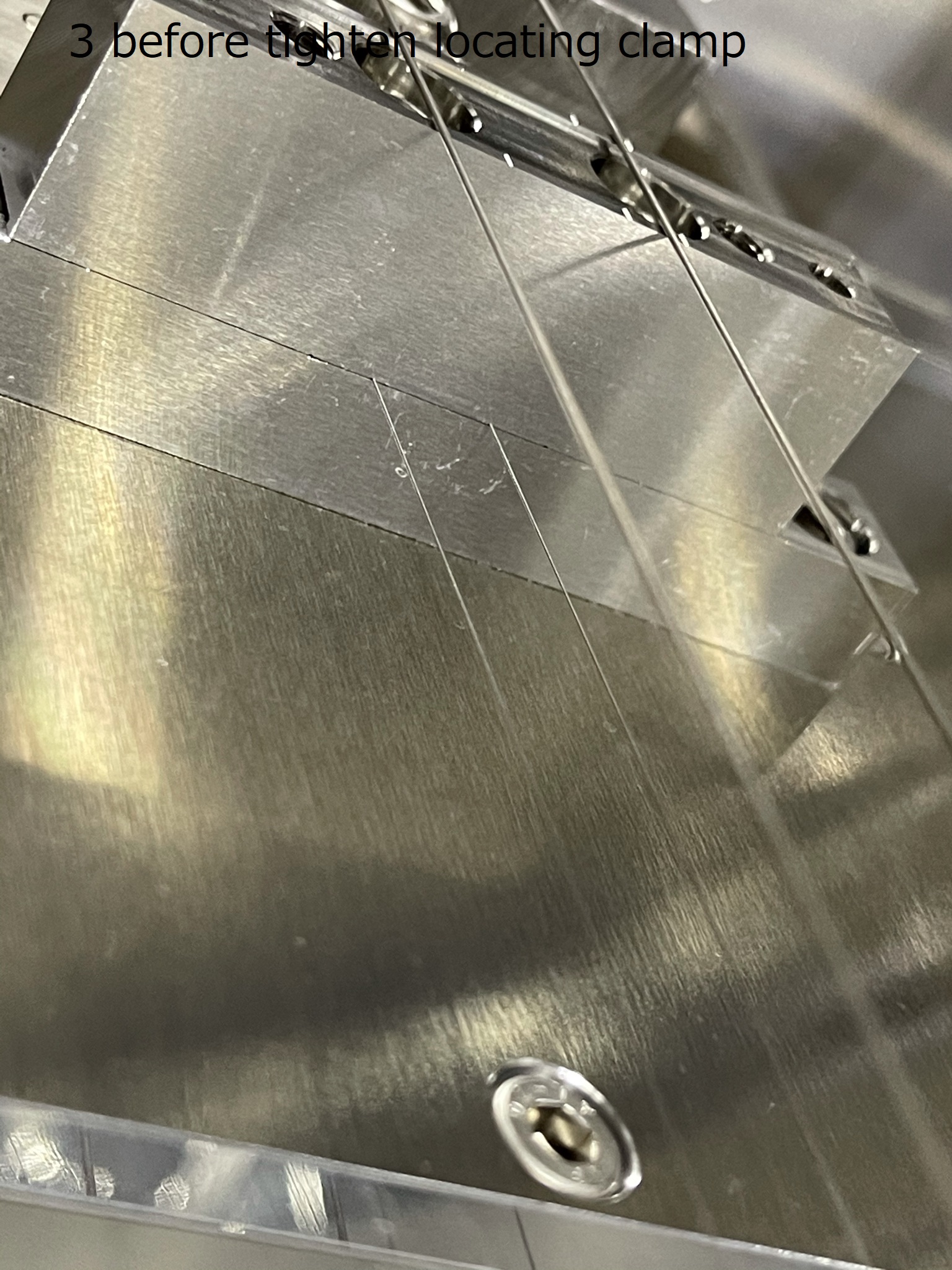
- We tightened the inner wire locating clamps with a torque of 2 Nm. Highlights:
- The -Y side was easy because the wires were in the grooves already.
- However, the +Y side was hard because one wire was not in the groove.
- The clamps had to be opened a little more to make it easy to put the wire in the grove.
- The wire was pushed with a PEEK cable tie.
- Originally, the screws in the +Y clamp were completely loose.
- We released the mirror from the RM.
- We lowered the RM and removed the jack.
- We locked the RM to the security structure and the mirror to the RM.




{kind=link}
{kind=link}
{kind=link}
{kind=link}