With Washimi-san.
See pictures in the album BS Remedying work after O3.
- Following entry 15769, yesterday I modified the medm screen entries for the transformation from virtual sensors toreal ones and from virtual actuators from real ones.
- I moved the IP using the horizontal fishing rods to the neighborhood of zero, where the new setpoint is.
- I took a snapshot of the new IP setpoints and turned the IP control system on using Guardian, however, Guardian keeps using the old setpoint values. I don't know the reason.
- Today I turned the control system on by hand and it worked fine.
- I moved the BF close to zero using the fishing rod.
-
I tried to recover the readout of the oplev from the control room, however, it was not possible. Then, wee went to the tunnel and inspected the position of the beam:
- The beam coming out from the chamber was reaching the edge of the first folding mirror and was divided in two beams, situation which was confusing at the begining.
-
After we assessed the situation correctly we moved the F0-Y stepper motor (recent addition
 ) and brought the beam onto the centres of the QPDs.
) and brought the beam onto the centres of the QPDs.
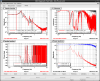
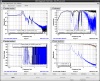
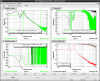
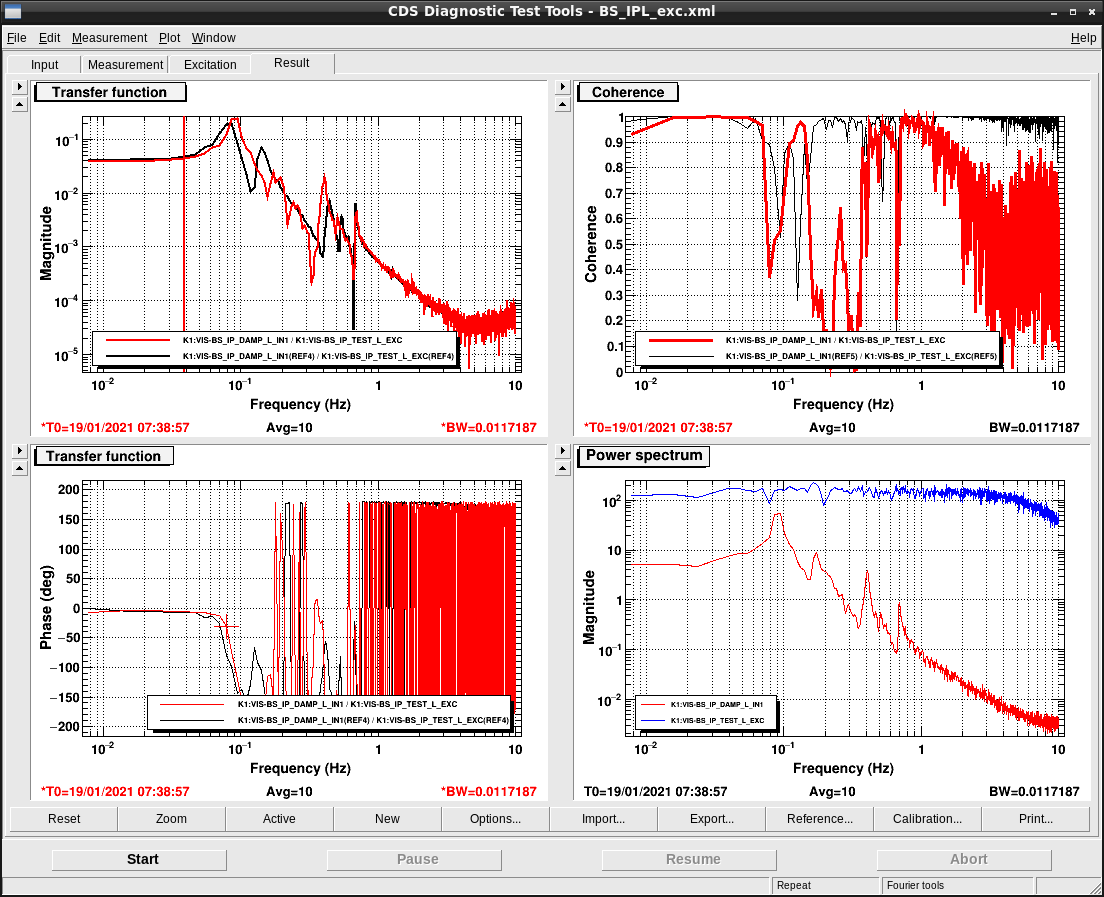
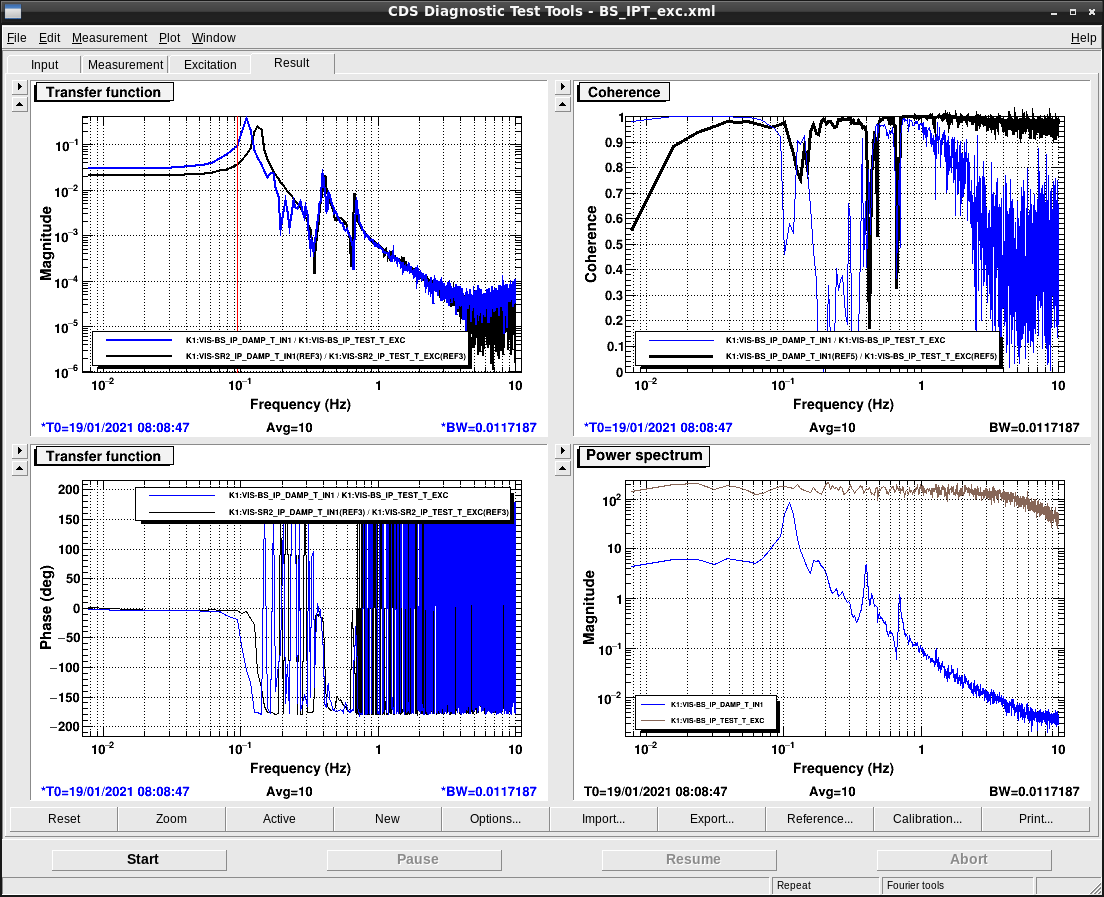
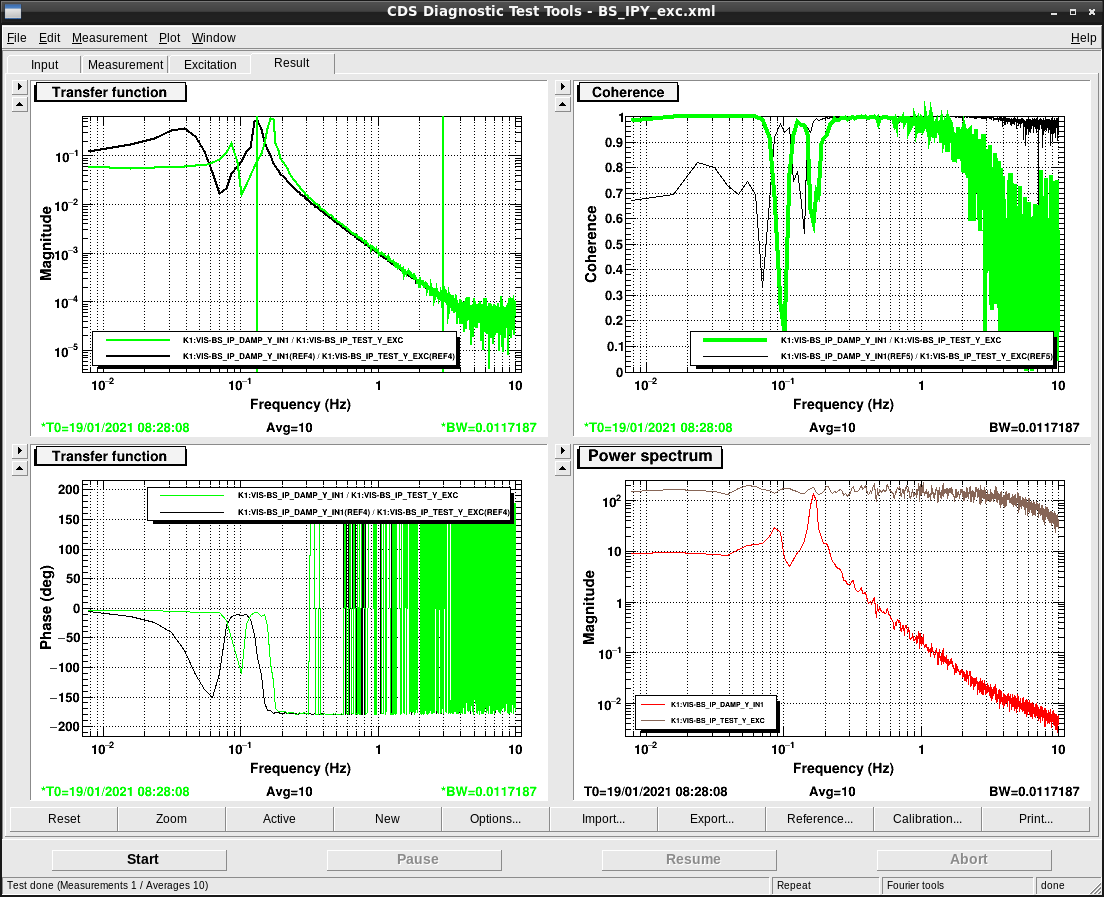
- I measured transfer functions of the IP (see pictures attached). The system looks relatively healthy but in the TFs for IP-L and IP-T the coherence is low between roughly 150 mHz and 400 mHz. We should investigate.
{kind=link}
{kind=link}
{kind=link}