I restored the BF local damping filter around 12:15 according to Nakano-kun's suggestion.
[Ushiba, Nakano, Kenta]
We applied the same filters of PR3 for BF and tuned the gain of L,T to 0.2, the gain of P to 0.3 because of the noise in IM OSEM signal in P. we also applied the same filters of PR3 for IM YAW, furthetmore applied for IM PIT. but in > 1 Hz region TM oplev signal has the noise, so we tuned the gain to 0.1.
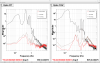
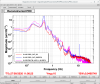
Finally, we also can go to ALIGN STATE of PR2. Here are the plots of PR2. Black line is TM Oplev spectra of PIT and YAW when PR2 is free swinging, blown is when engaged previous damping control, red is after we modified damping filters. As you can see, in whole region, the red lines got lower than brown ones
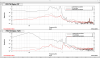
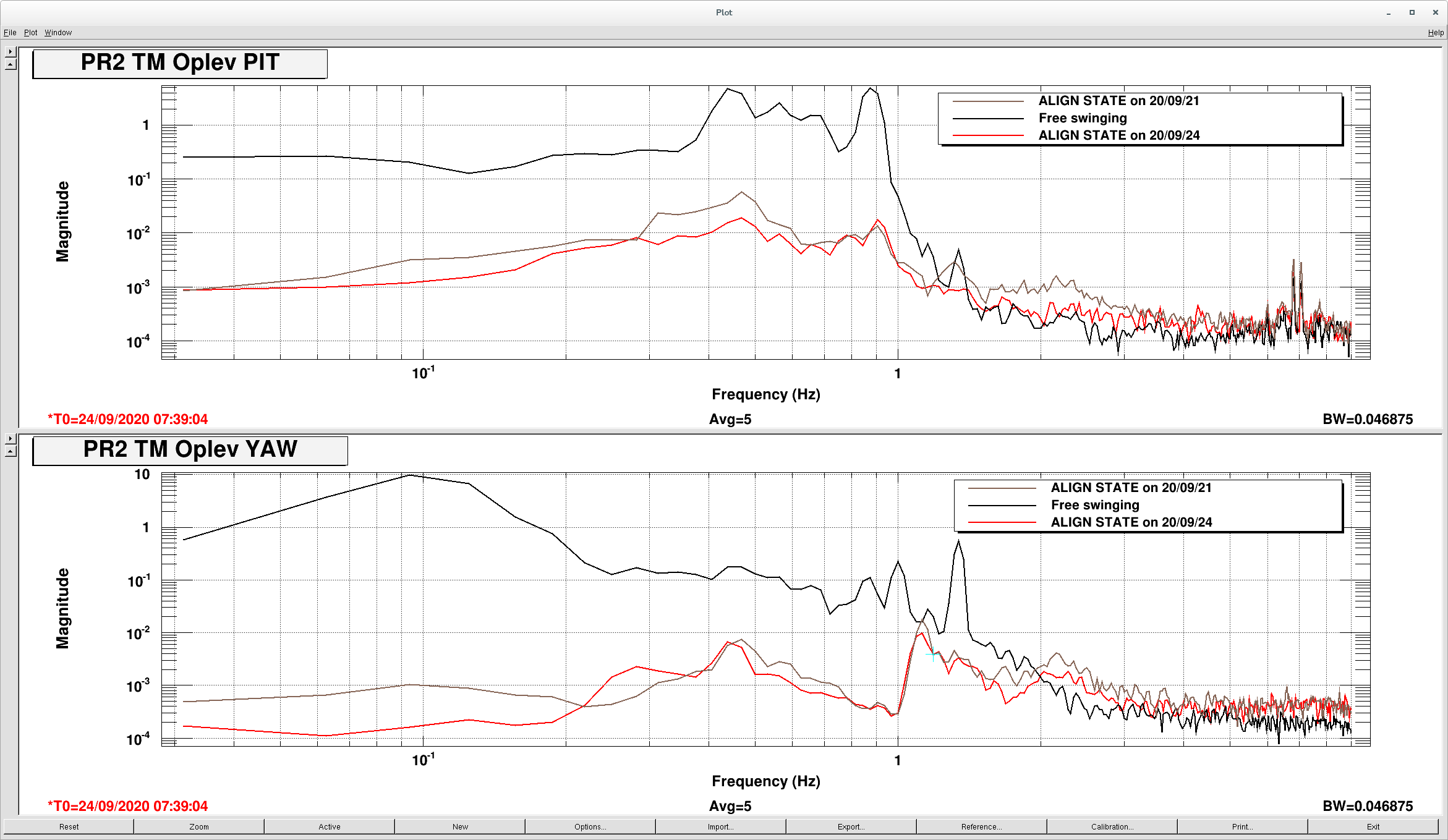
On the way to the PRM control loop modification, I need to modify the oplev loop. As the result, the PRM motion has been reduced drastically. The attached figure shows the oplev PIT and YAW. Red is the ones with new loop, brown is the ones previous one, and black is the ones of free swinging.
- The OSEM yaw loop was over-damping loop as well as the other loops. Due to this overdamping loop, the phase delay around the resonance was very shallow. Thanks for that shallow phase delay, the oplev loop was stable. However, we reduced the damping gain, then the oplev loop got unstable.
- I re-designed the filter, then the residual motion of the mirror has been reduced.
- 1 Hz peak disappeared. This peak was gain peaking. due to the resonance.
- I asked to Ushiba-san to implement this loop to the other PRs.
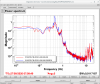
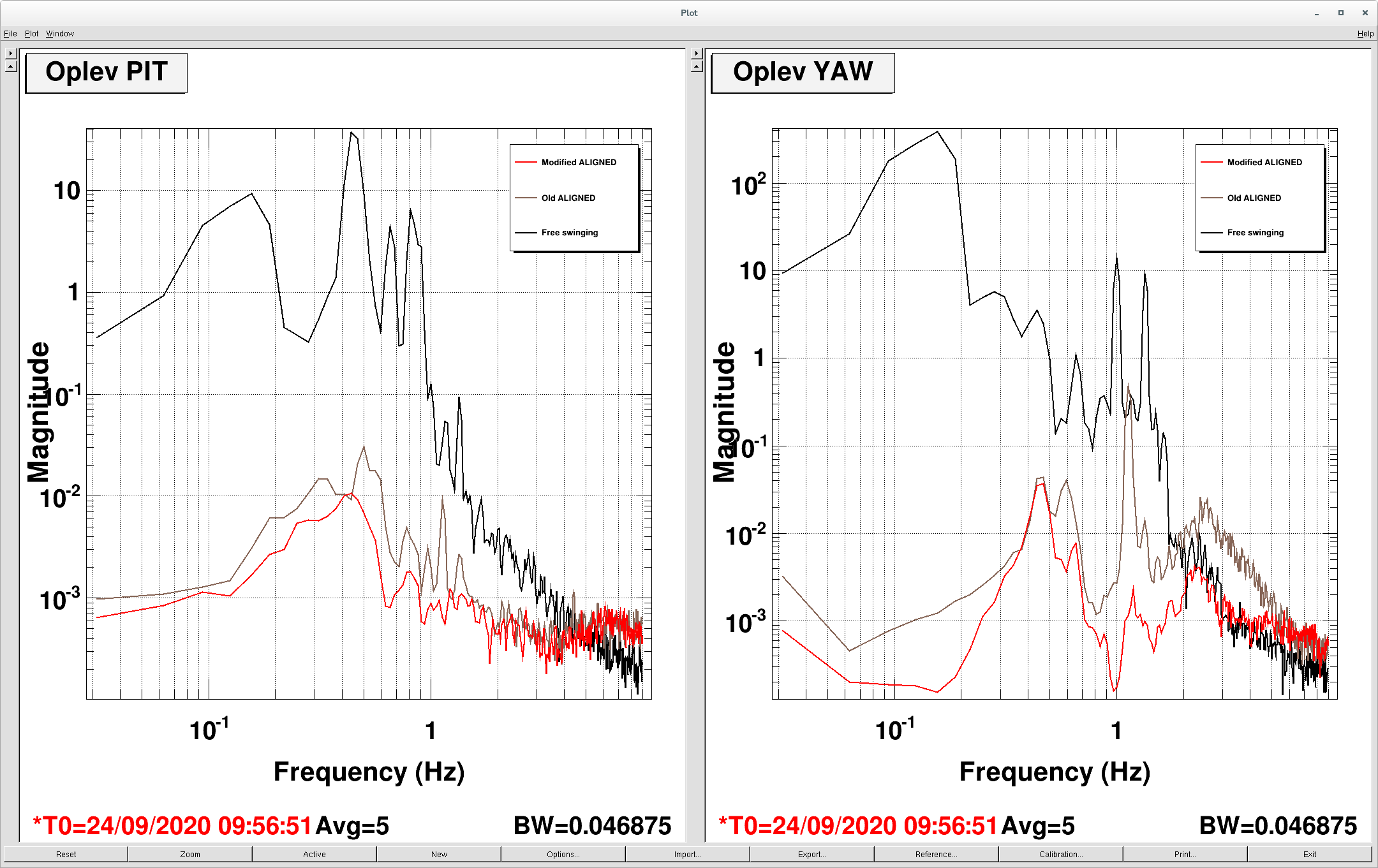
I succeeded to damp the 0.45 Hz length peak by feeding back the length oplev signal to the BF. Attached figure shows the spectra with (red) and without(blue) new damping loop.
The motivation was that:
To close the PRCL, we need to control this 0.45 Hz only with TM for now. Since this 0.45 Hz peak is the pendulum mode, it is not really optimal way to control it only with TM-RM actuator. It is better to damp it somehow.
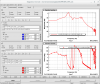
I again optimized the local damping loops of the PR mirrors. The gain of several BF and IM local damping loop was reduced.
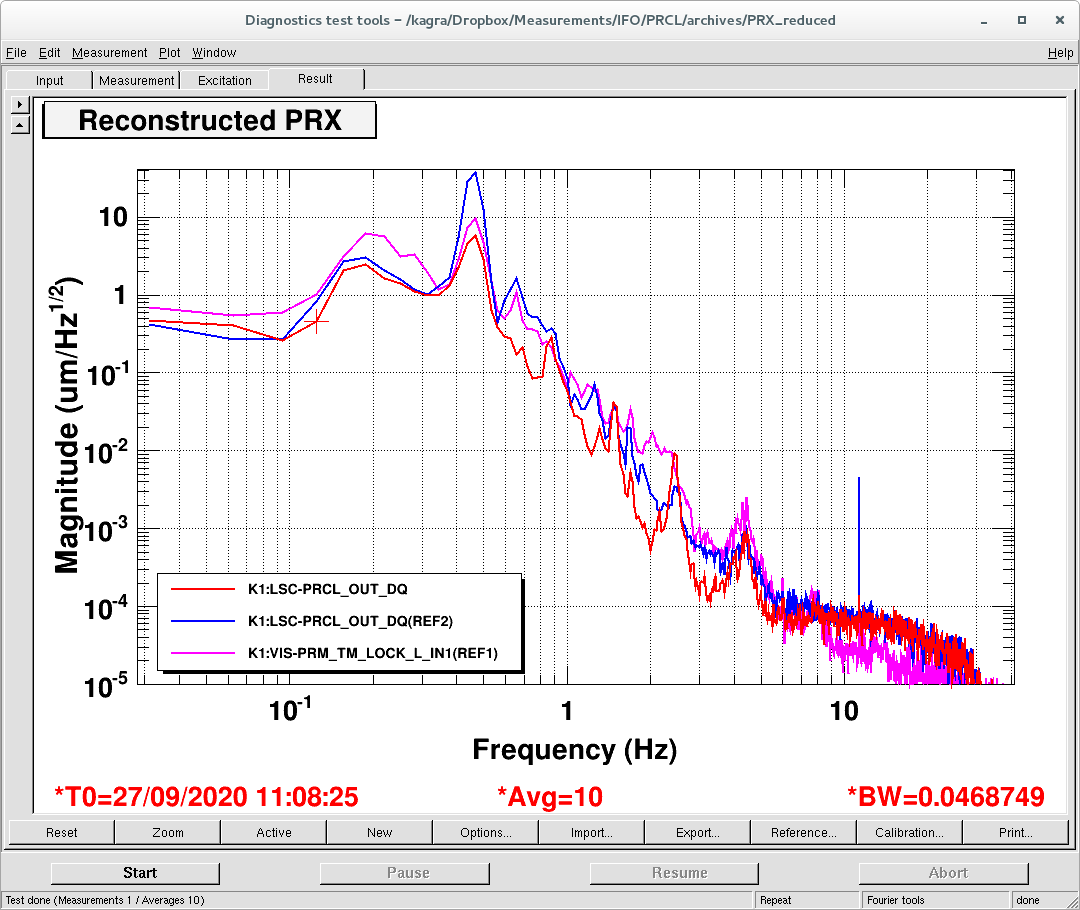
As the result, the longitudinal motion has been drastically reduced. The attached spectrum shows the reconstructed PRX signal (actuator efficiency * feedback signal). Purple one is the one we took first of this PR mirrors modification, and the blue is the one I posted on klog15092. The red one is the current PR mirrors motion.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}