So far, with QPD DC loops had some problems. So apparently it's difficult to use IMMT1TRANS QPD because of scattering lights when PRFPMI RF locked. Also I want to avoid to use MCO as a combination of MCI because it's off centered.
So the configuration changed to:
* WFS loops
DOF3 P => 1.14*WFS1 - WFS2 => IP PZT1
DOF4 P => WFS1 + 1.29*WFS2 => MCE
DOF3 Y => WFS1 - 4.9*WFS2 => IP PZT1
DOF4 Y => WFS1 + 2.15*WFS2 => MCE
- they are adjusted to have ~0.1Hz UGF.
- somehow DOF4Y had an offset of -1800. I need see how this goes in a long term.
- sensmat data is in /users/kokeyama/imcasc/20200331/
- they seem happy. I am not sure what were the problems last time - but still not sure if they are good for a long term.
* QPD loops
DOF1P/Y => MCE TRANSQPD with offsets => MCO
- They are adjusted to have ~0.05-ish Hz UGF, slower than the WFS loops.
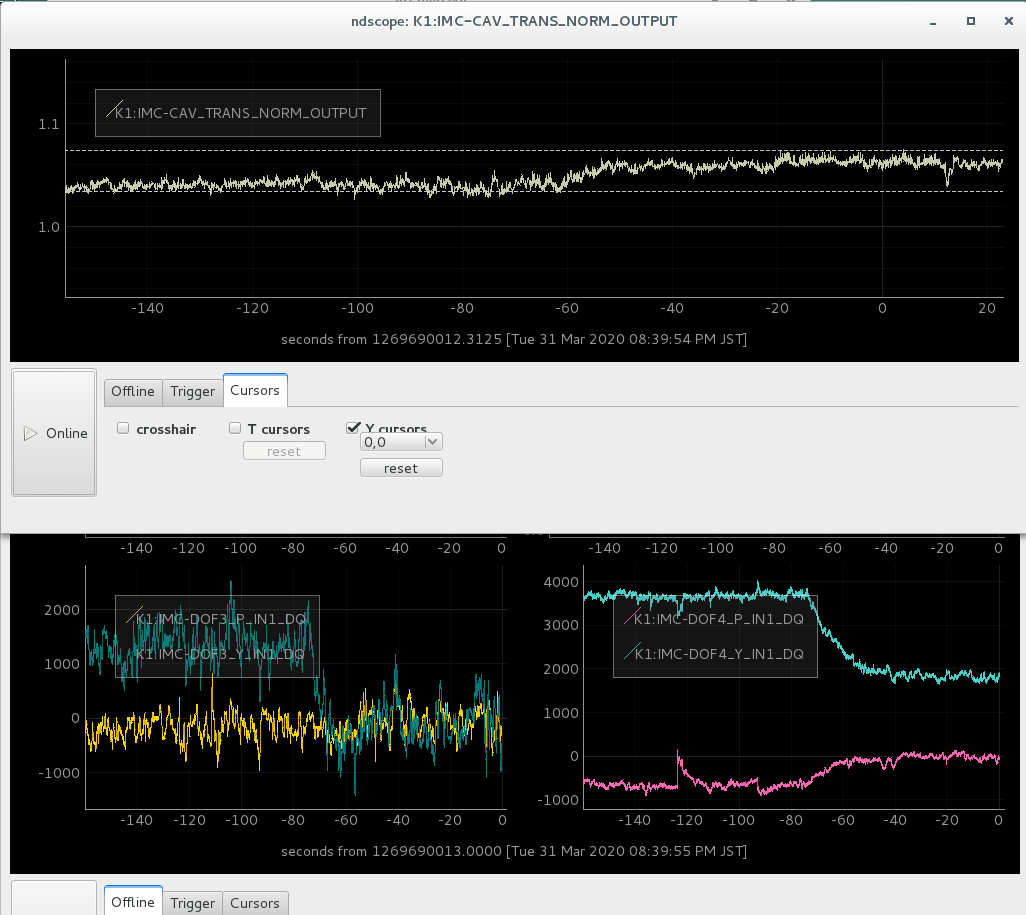
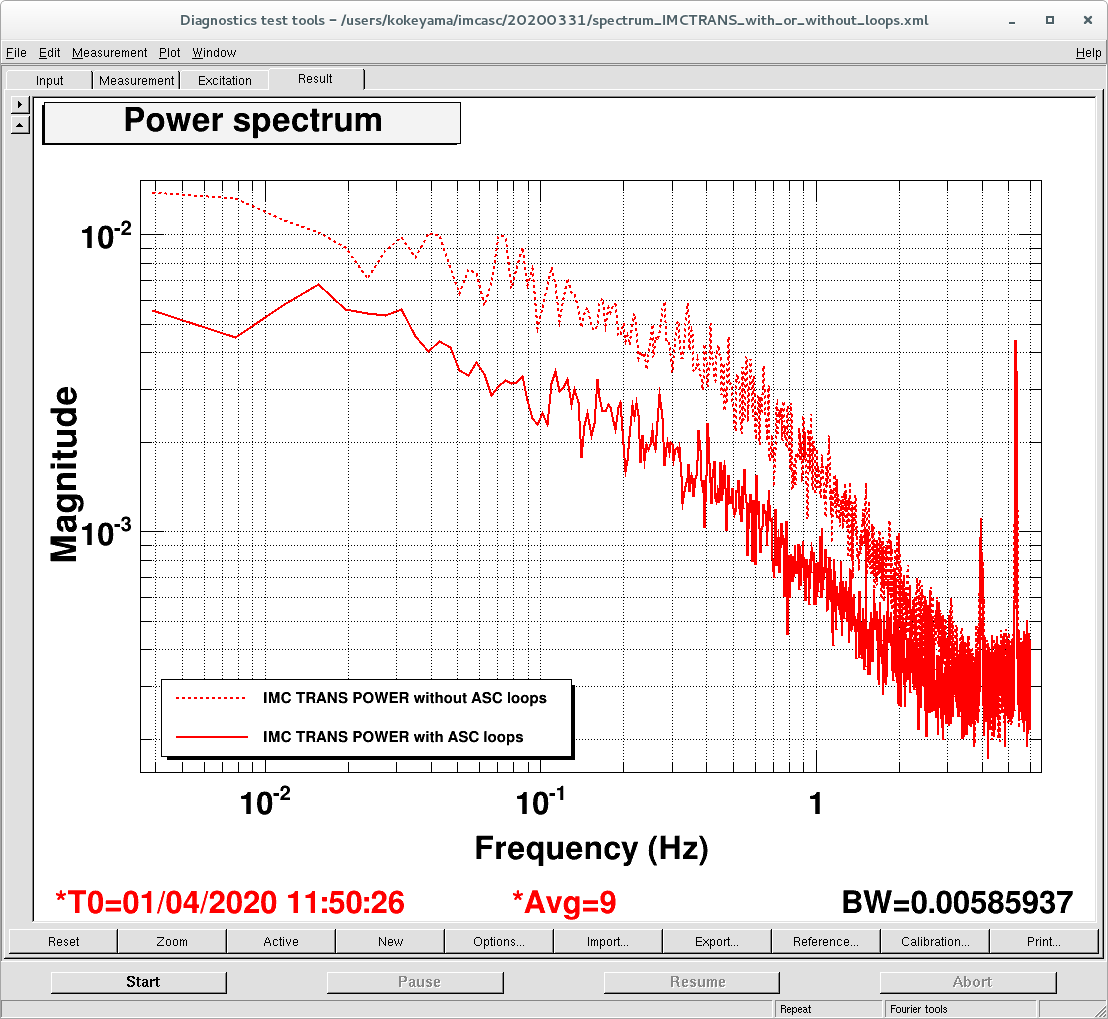
As attached, the TRANS power build up was improved, whereas QPD DC values are stable. IMC guardian and IO guardian were updated accordingly. Please request IMC_LOCKED instead of LSC_LOCKED for IMC.py (and let me know if it's not working). In case it doesn't work well, the IO.py was checked in svn version 2930. The new one is version 2931.
Let me see how it goes for a long time. I am worried especially if the suspension actuator and PZT ranges are not enough for the long term drifts.

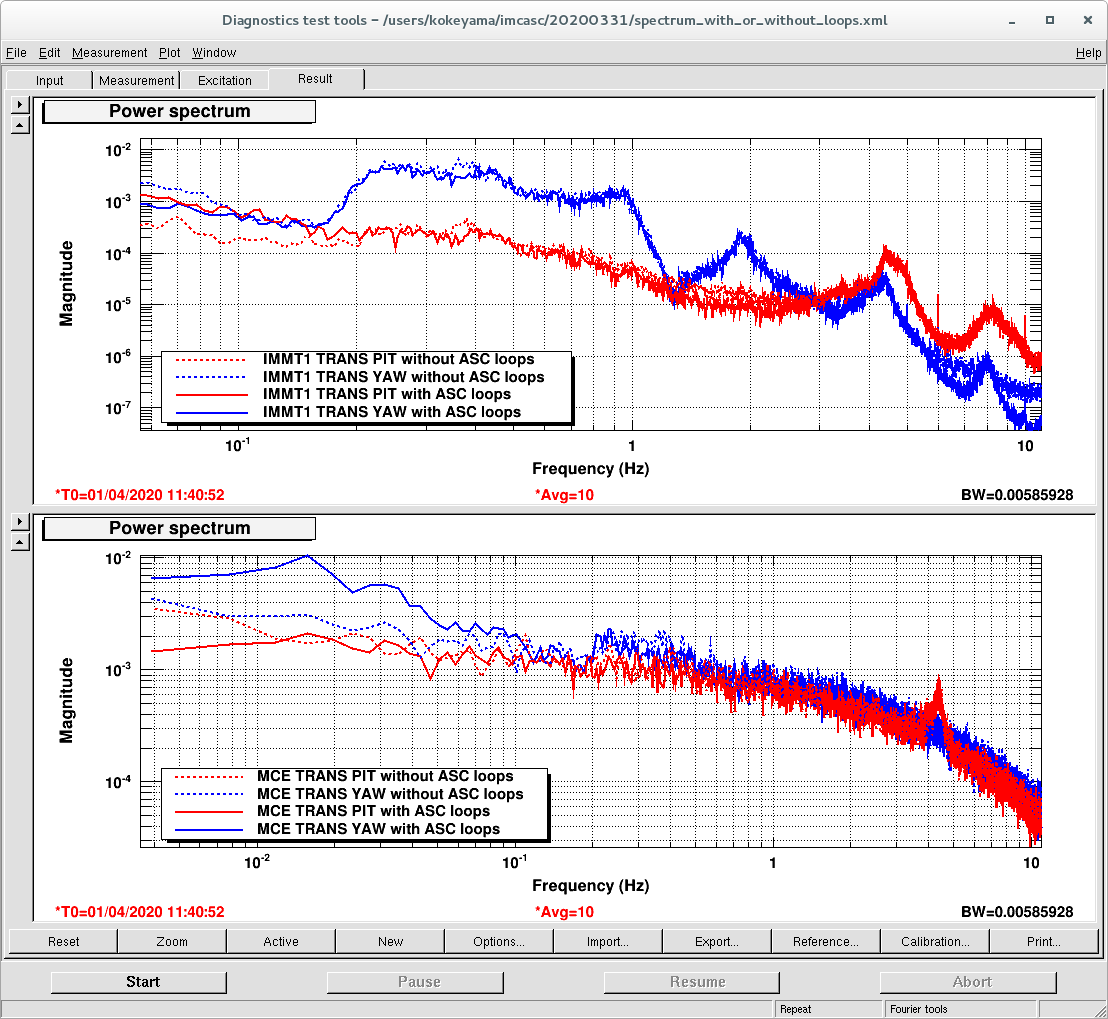
* Some characteristics *
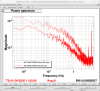
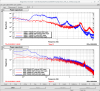
Some trans QPDs are noiser wiht the asc loop (which was seen also before)
MC TRANS power - flactuation is reduced below 1Hz (but why from such high freq? UGFs should be designed below 0.1Hz)
(in-loop, DOF4)
MCE trans PIT - suppressed the motion below 0.01 Hz.
MCE trans YAW - noisier with the asc loop. (to be tuned)
(out-loop)
IMMT1 TRANS PIT - noisier with the asc loop (to be tuned)
IMMT1 TRANS YAW - slightly better with the asc loop?
---------------
DOF3 PIT, UGF 0.01 Hz. Tuned to be 0.1 Hz (DOF3 gain increased for 20 dB)
{kind=link}
{kind=link}
{kind=link}