Continued to this report
ASC fedback config was changed to use PRM and PR3. They seem to work OK for both PIT and YAW. Implemented in Guardian, should work at least for today. We will see how it goes tomorrow and after. Today mode hopping doesn't occur, and everting seems happy.
Before changing the config, I saved a bunch of things: the old setup params for the PRM and IMMT2 feedback, ASC.py and iscparams.py are checked in the svn as the revision 2858 and 2859, respectively. Snapshot of the old setup is save as k1asc_snap_20200111.snap in target.
(DoF PRC1_P, PRC2_P)
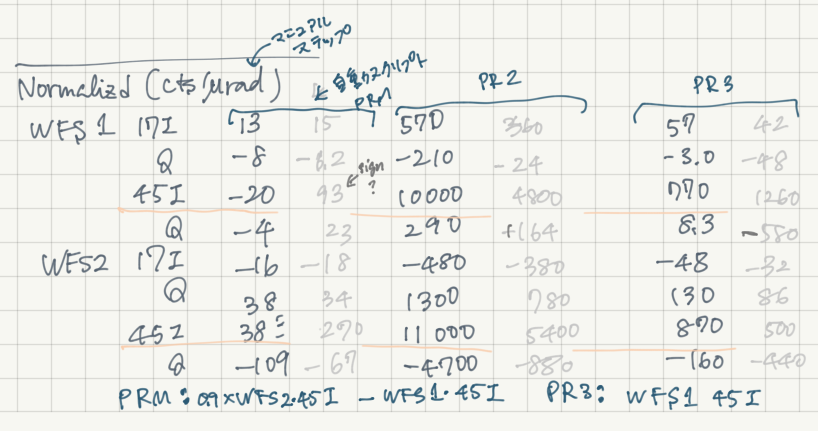
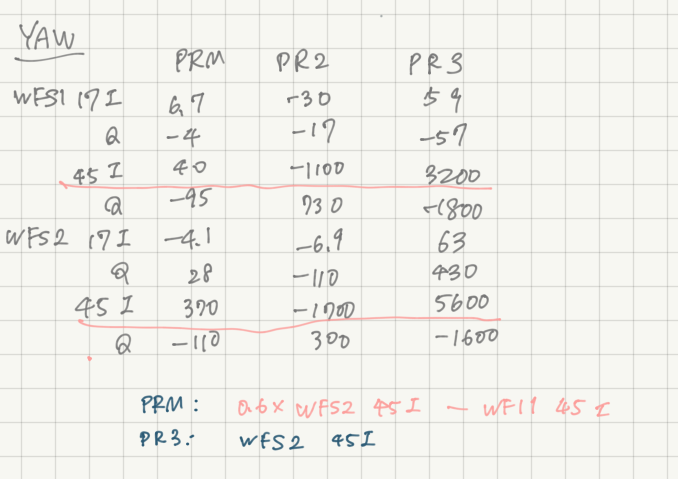
Since the asc loops for PRMI feeding back to PRM and IMMT2 did not work stably, we measured the sensing matrix of PRM, PR2, PR3 and tried the feedback with PRM (for PRC1 DOF) and PR3 (for PRC2 DOF), instead of IMMT2. Used sensors are now the combination:
PRM: REFL WFS2 45I - WFS1 45I (the ratio is tuned to cancel PR3/2)
PR3: REFL WFS2 45I
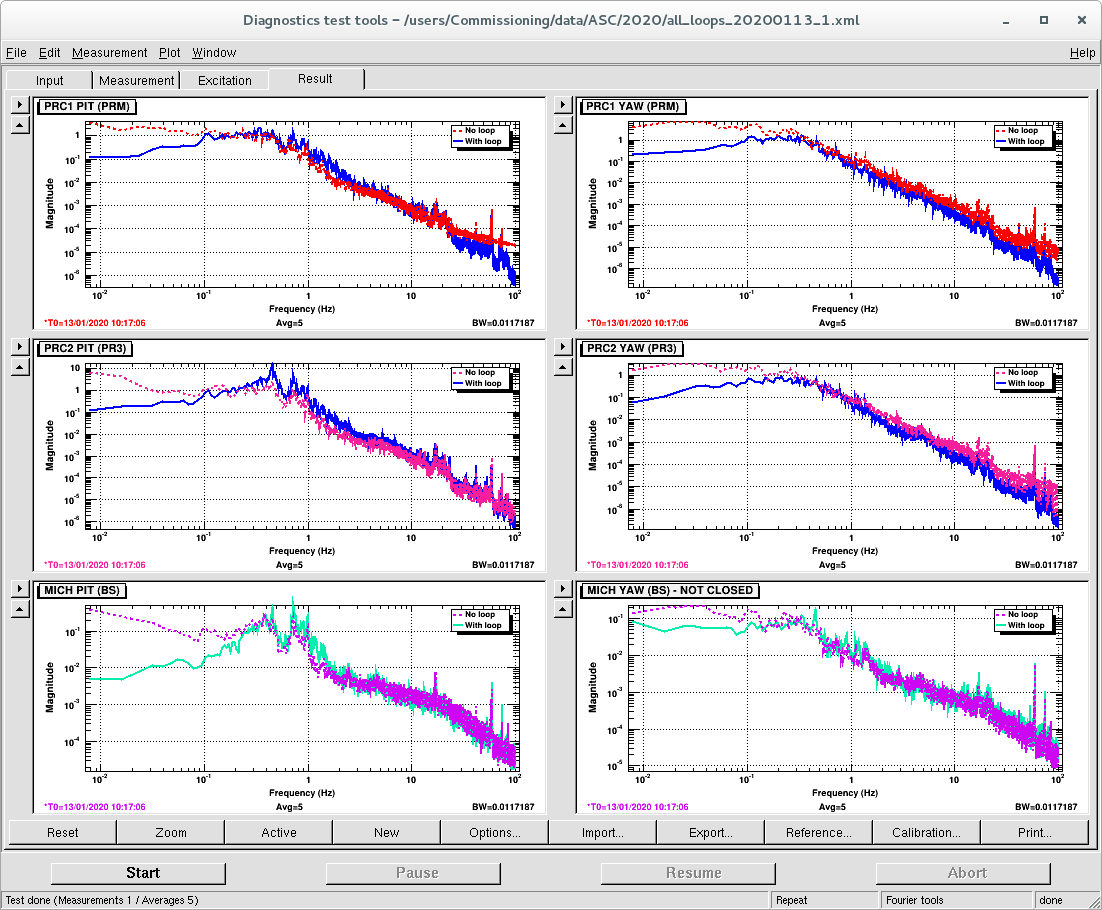
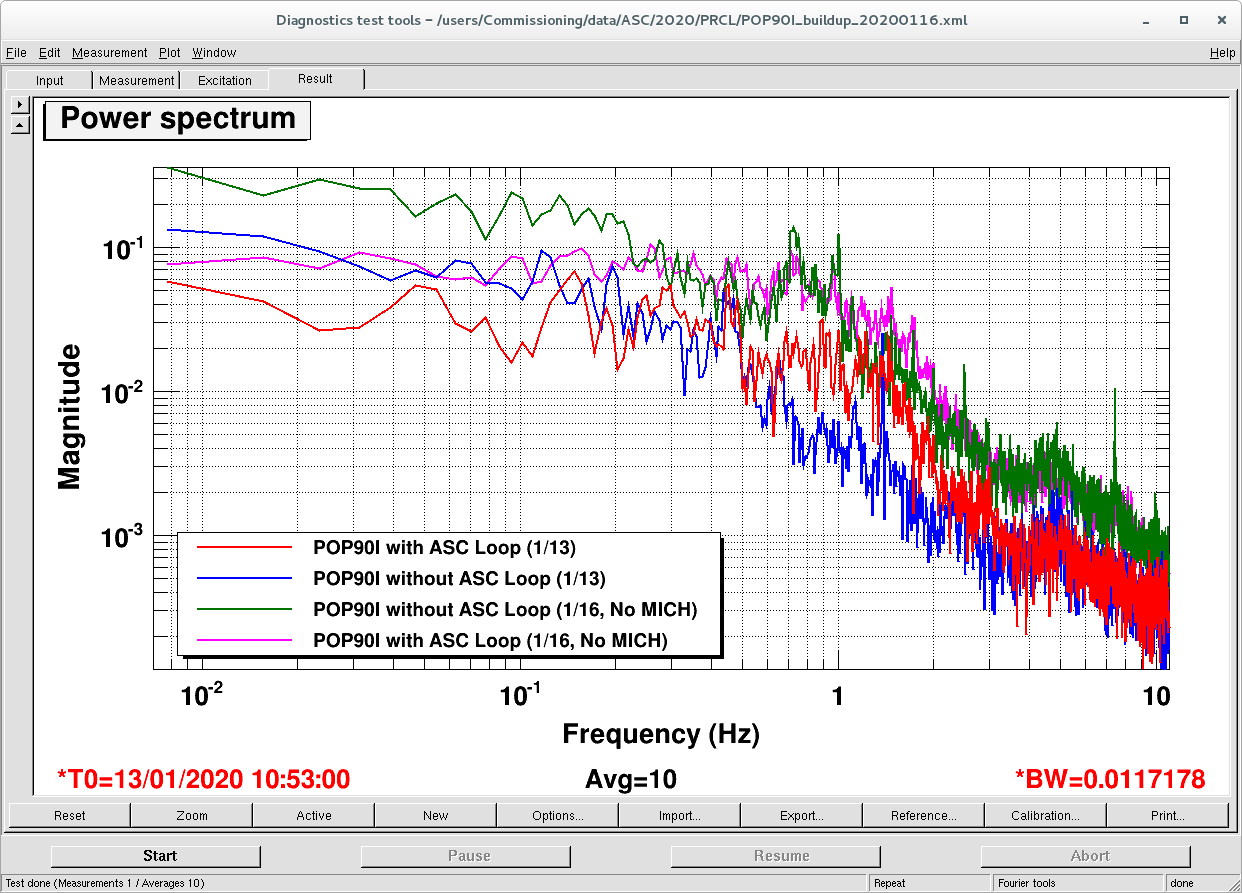
Both PIT loops worked OK, bringing the POP90I buildup to the best point :) Let's see how they go tomorrow...
(PRC1_Y, PRC2_Y)
Loops were closed fine with the same sensors as above. PR3 was accidentally kicked and cannot come back (see the independent post).
(DoF MICH)
Continued to the last time, MICH_Y doesn't work with a strange offset. Setting the error point offset to the initial offest, it doesn't work. MICH_P works good.
(Comments)
* UGFs are set to be around 0.1. See the second last attachment.
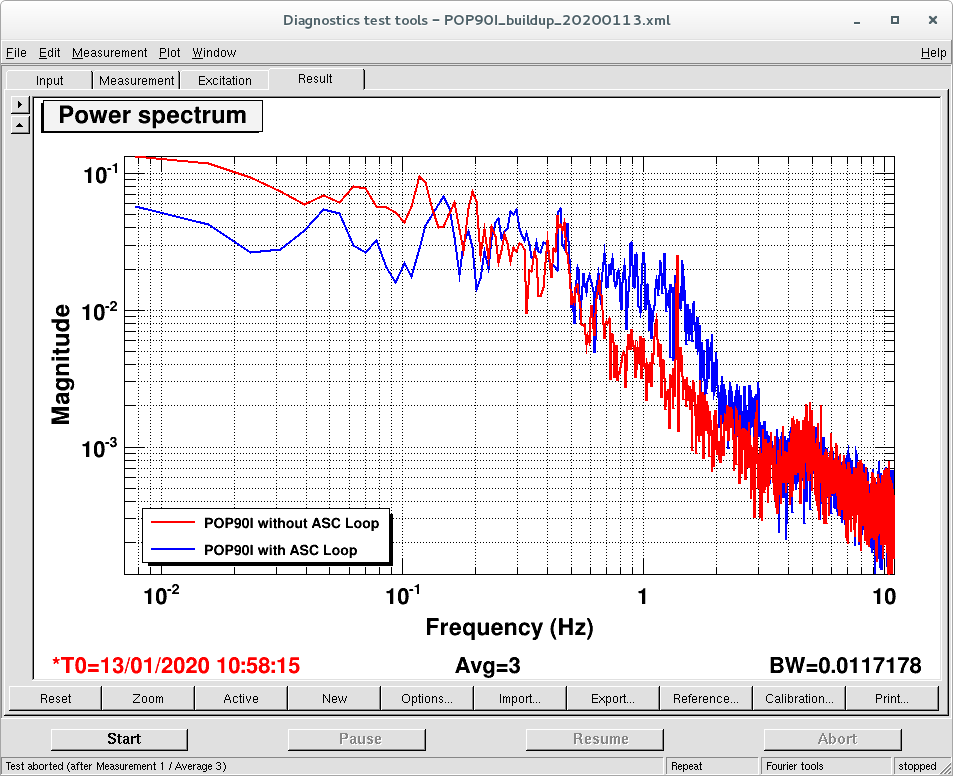
* POP90I buidup get quieter in low freq, however got noiser around 1Hz with the loops. See the last attachment.
* Do we want to use PR2 instead of PR3 for the gren X alignment? PR2 has same response to PR3, but the signals are 1/3 smaller and the SN may be not good.

The loops still work OK.
- At first, the loops did not close and broke the lock. After a bit of initial alignment tweak, it worked ok. (How can we automate this?)
- We noticed that the REFL DC centering can be done better with PRM, not REFL_WFS picomotors. This is also good for the PRM initial alignmnet with the WFS diodes as references.
- Because of the OSTM install and so on, today the beam seemed not to going to AS WFS, therefore no MICH loops were closed.
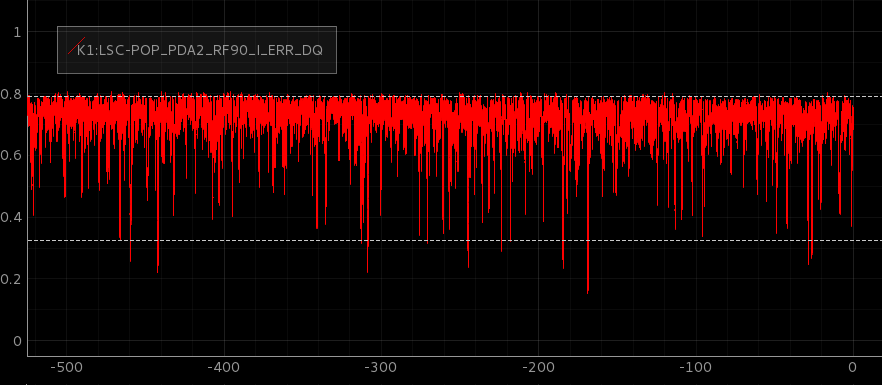
- The POP90I fluctuation is much bigger today than when this main post (see the attachments for the time series and fft). We are wondering what is the difference between the quiet day and noisy day. It seems to be related to the PRM YAW motion. Akutsu-san noticed that PRM TM L coil outputs are saturated from the length feedback, but we are not sure if it's related to the POP90I buildup. We lower the LSC PRC gain so that the coil outputs were not saturated, and there were no change.
- We started writing an offloading script to offload the asc output to the suspensions.
PRMI is left locked.
Akutsu, Kokeyama
nah
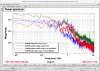
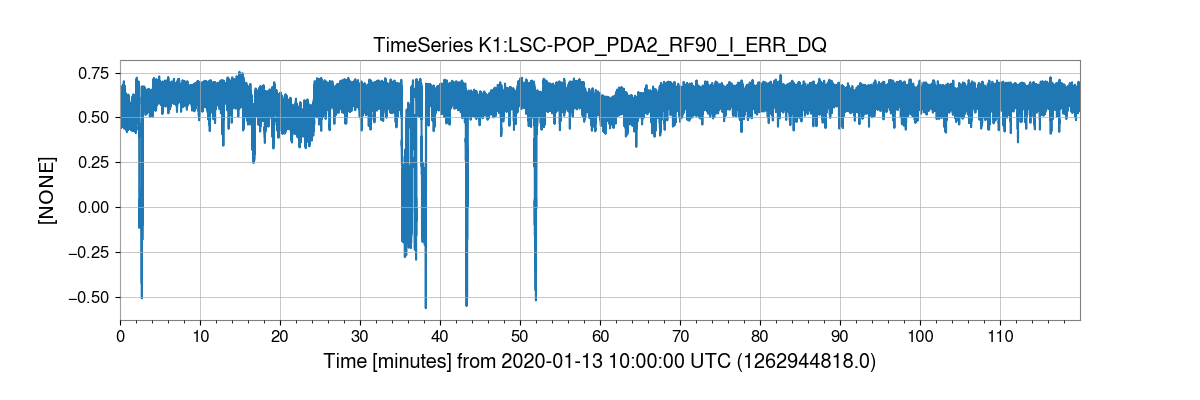
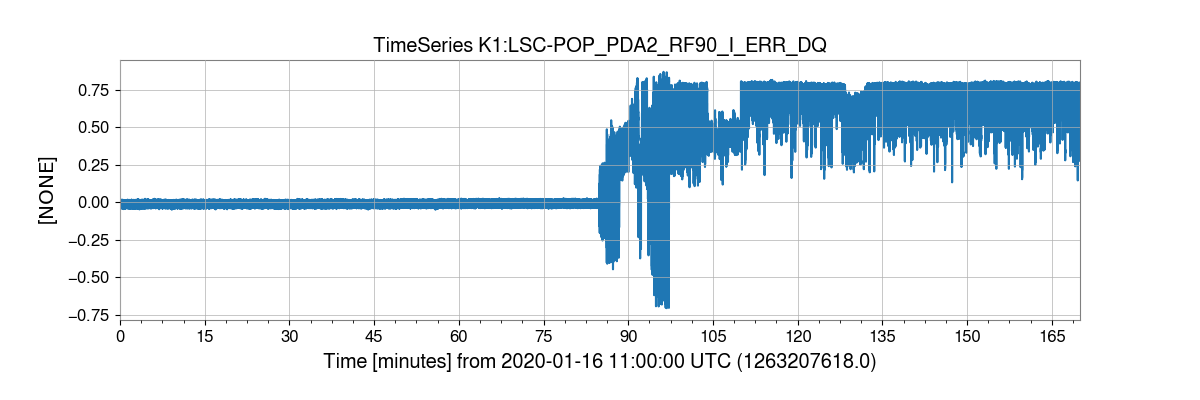
Using pastavi, we confirmed the difference of the stability of the build-up amounts of the power recycling between the stable day (Fig 1) and today (Fig 2; fluctuating...) while the PRMI locks. Althoug it is not so noisy the ground today, the build-up power is more fluctuating than that on Jan 13.
We really like to know what is the reason of the different fluctuation level. It would be urgent... DetChar folks, could you please kindly help us...? Which singals are related to those differences?


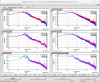
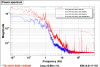
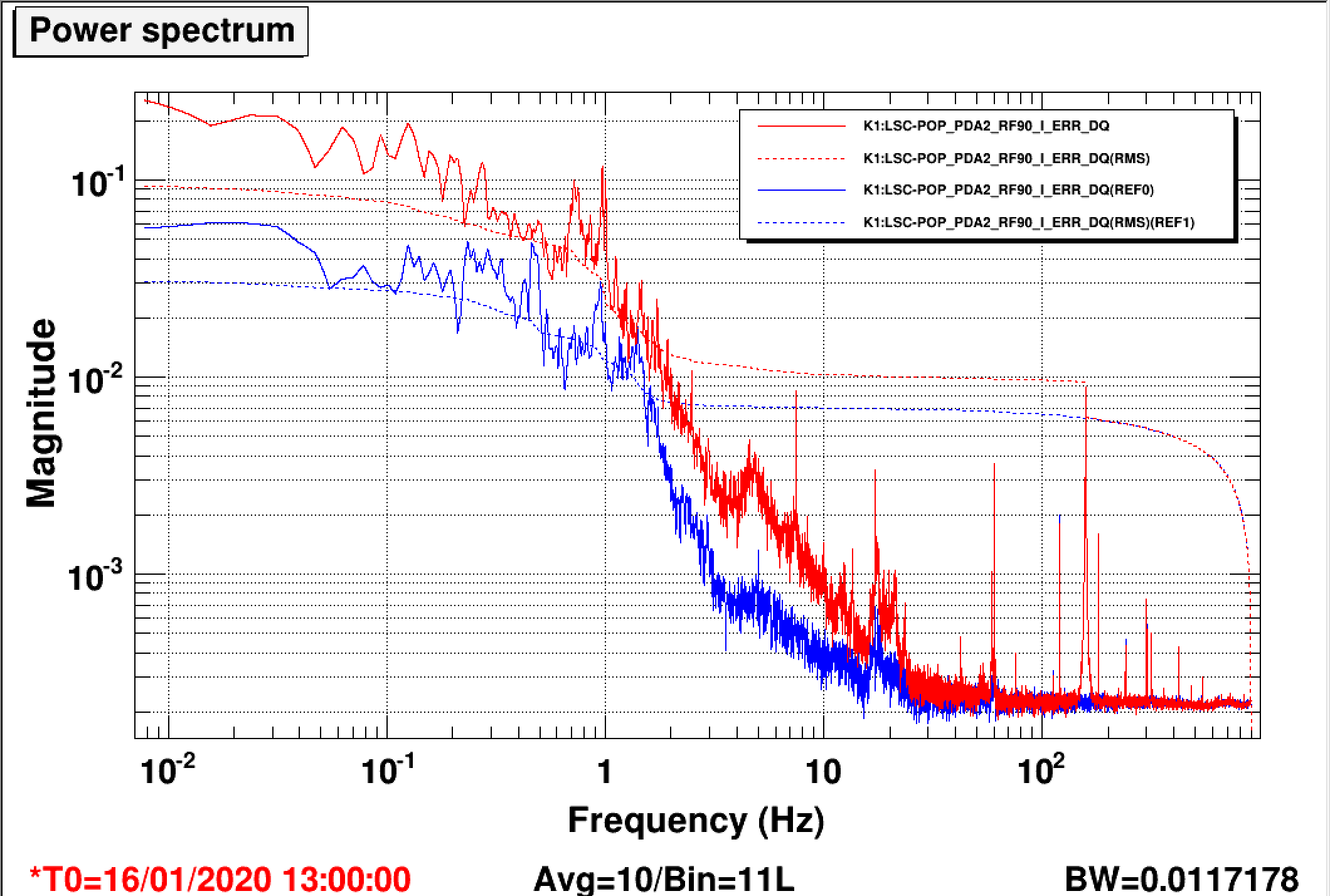
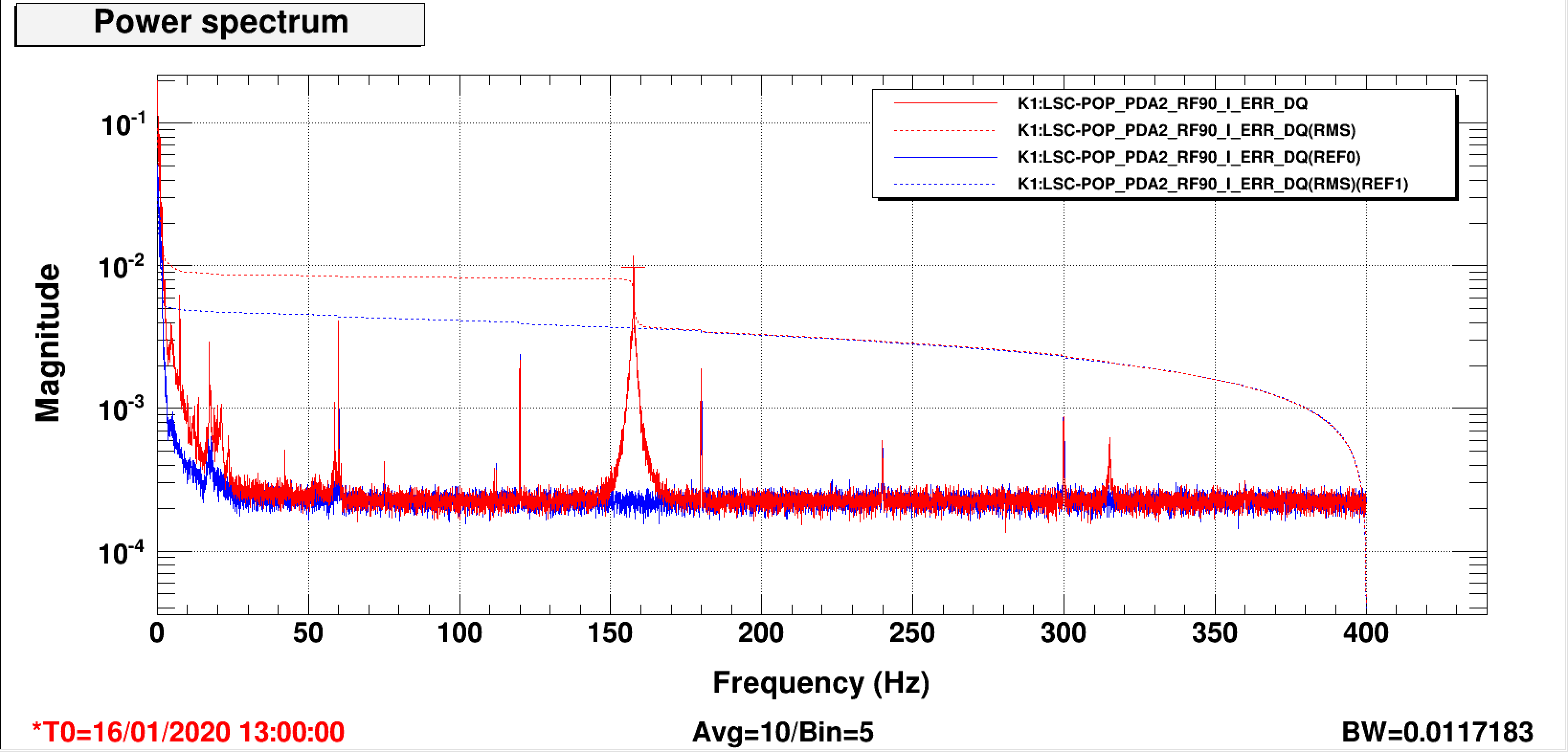
I compared the spectrum for silent day and noisy day(Fig.1 and Fig.2.).
As you can see, there is difference in below 20Hz and 157Hz peak.
By applying the Bruco, there is many coherence between various RFPDs. But I could not find the clear reason for 157Hz peak.
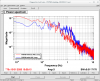
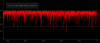
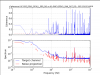
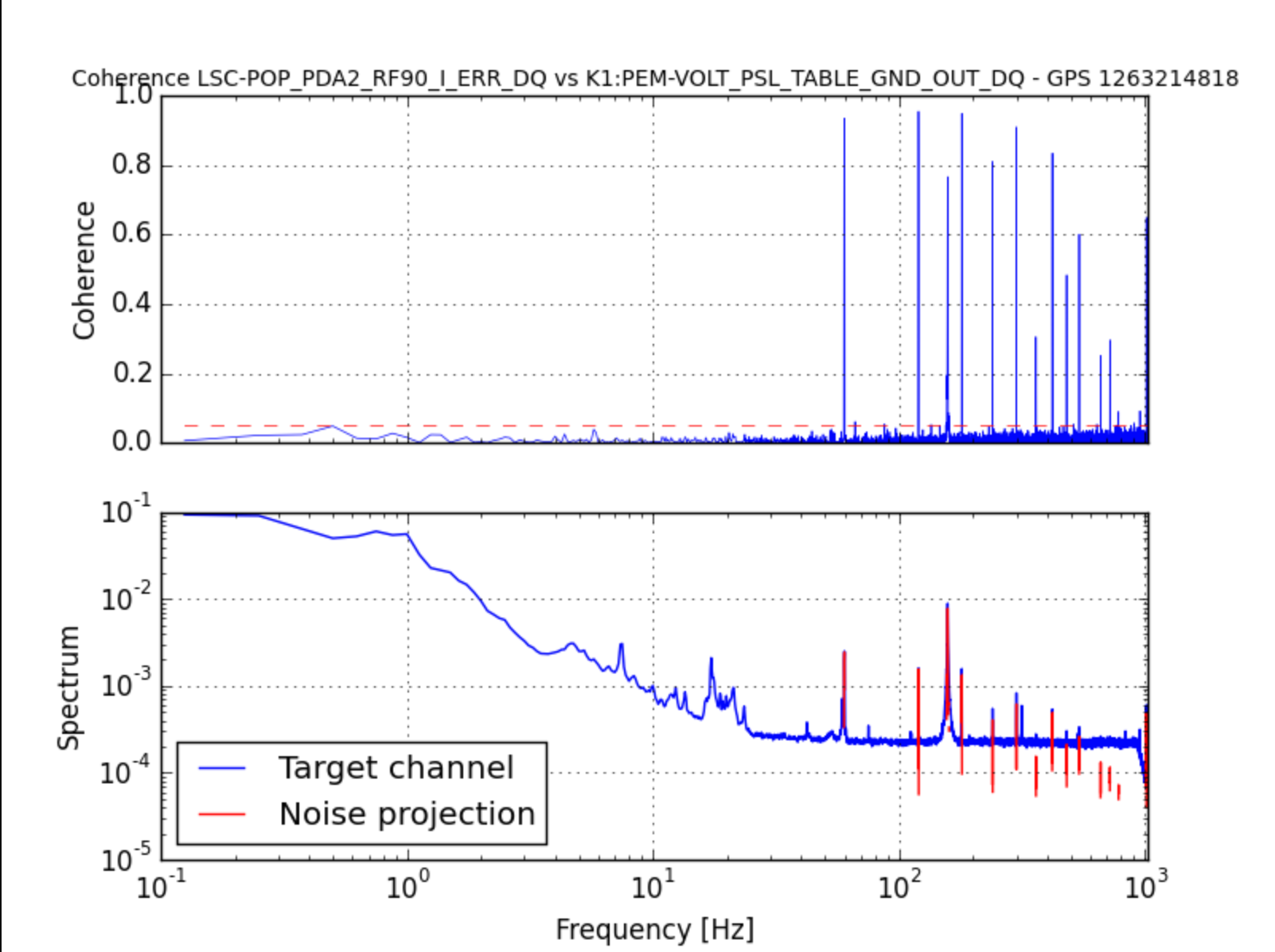
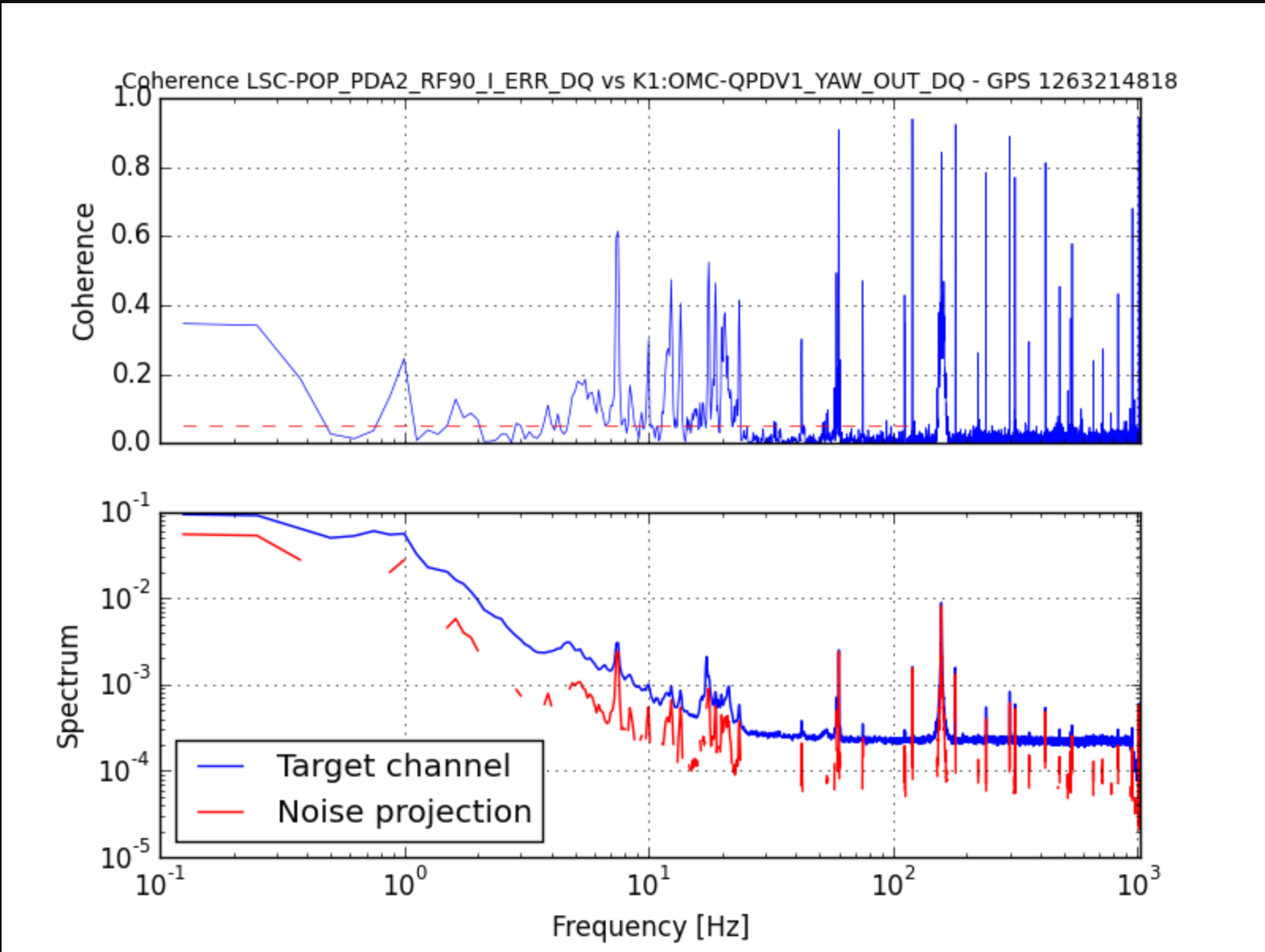
Twohints were (1) PSL volt monitor(Fig.3.) (2) OMC QPDV1 YAW(Fig.4.)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}