[K Tanaka, Kokeyama, Ushiba]
We measured the sensing matrix of TMSY for Y-hard and Y-soft mode.
Result is as follows:
YSOFT PIT: QPDA1=0.046 count/urad, QPDA2=-0.056 count/urad
YHARD PIT: QPDA1=0.19 count/urad, QPDA2=-0.013 count/urad
YSOFT YAW: QPDA1=0.053 count/urad, QPDA2=0.13 count/urad
YHARD YAW: QPDA1=0.16 count/urad, QPDA2=0.072 count/urad
For both YAW and PIT motion, QPDA2 is not sensitive for HARD mode.
So, we decided to use only QPDA2 signal for controling Y-arm SOFT mode.
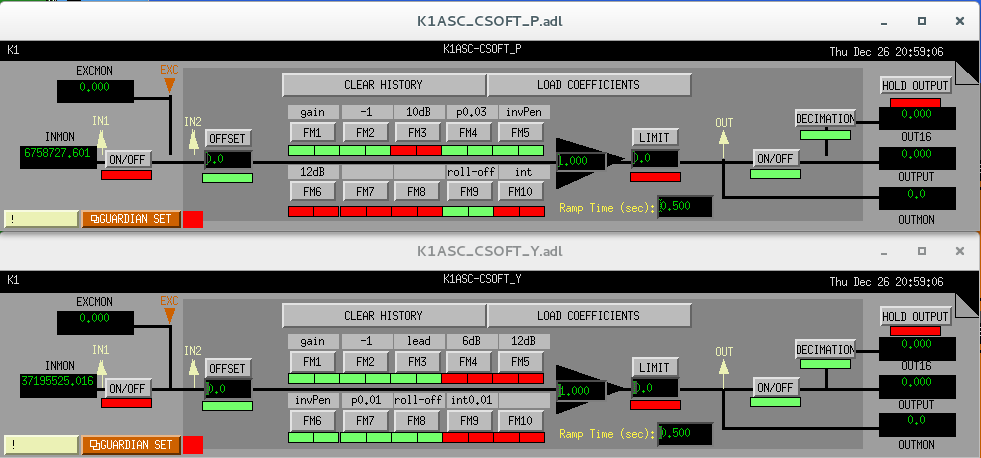
Current filter setting is attached one but engagement is a little bit complex to avoid the kicking.
First we turn only on the attached filter setting (Of course we should turn on INPUT even though INPUT is off in the attached filter bank).
After that we should change the gain to 1.
Then, we turn on the "int" or "int0.01" filter.
At last, we should tuen on "12dB".
It takes about 10 seconds that suspension follows the set point.

{kind=link}