This morning it was reported the BS was moving too much in yaw at 100 mHz or below.
I measured the residual motion of the optic and checked the coherence with other relevant channels in ALIGNED and FLOAT states. The motivation of measuring in FLOAT state is to search for control noise. Additionally, in ALIGNED state measurements were done with inertial damping on and off. When the inertial damping was off LVDT damping was used instead.
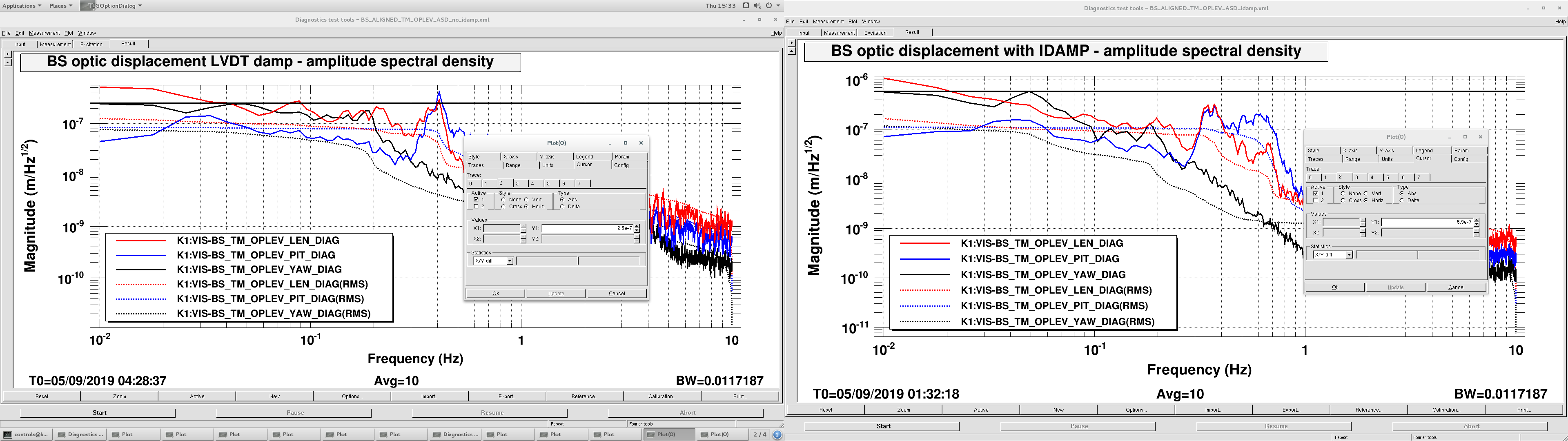
Inertial damping versus LVDT damping
- There's a maximum of TM-Y at about 50 mHz which is 2.36 times larger with inertial damping. See 1st figure.
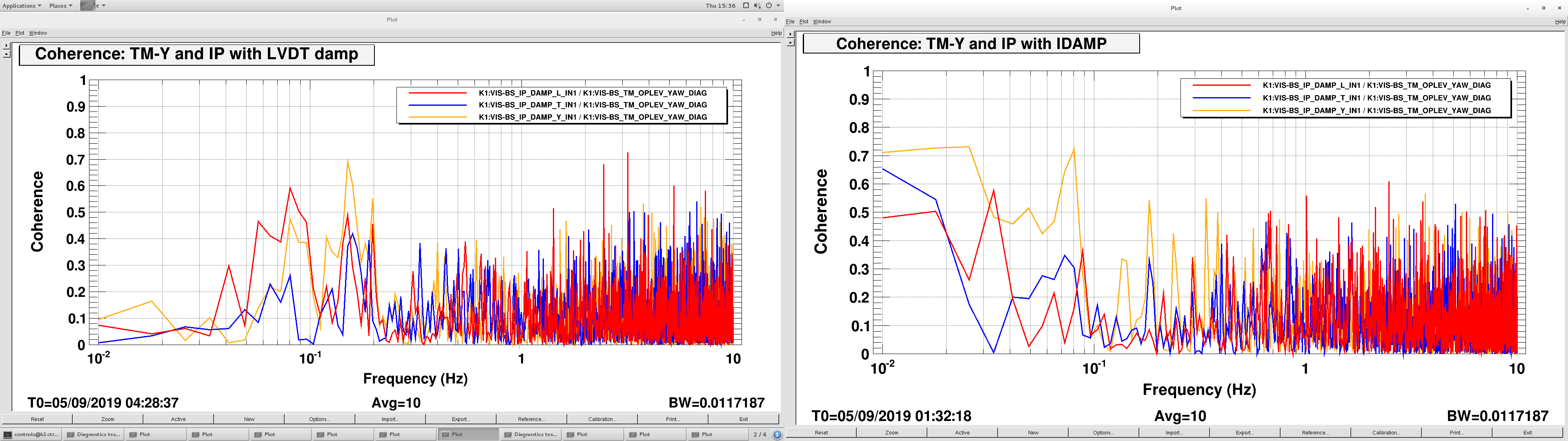
- The coherence between TM-Y and IP-Y is clearly larger with inertial damping below 100 mHz. See 2nd figure.
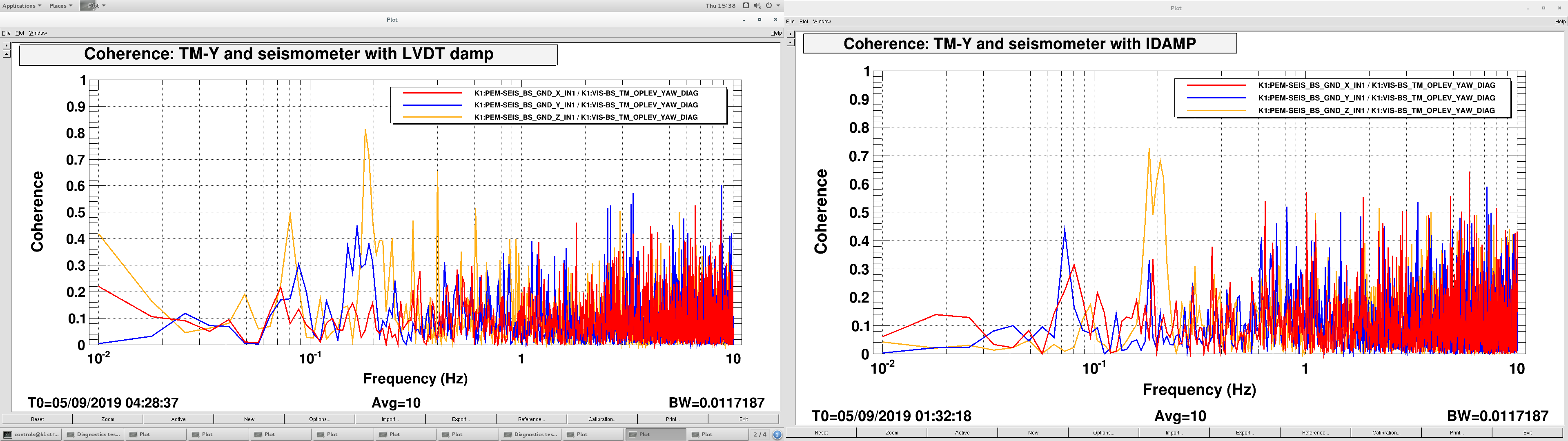
- Surprisingly, the coherence of TM-Y with the seismometer is not so different in the two cases. See 3rd picture. This suggests the inertial damping may be introducing other type of disturbances other than just injecting ground motion. Maybe geophone noise is leaking at low frequencies. More investigation may be necessary.
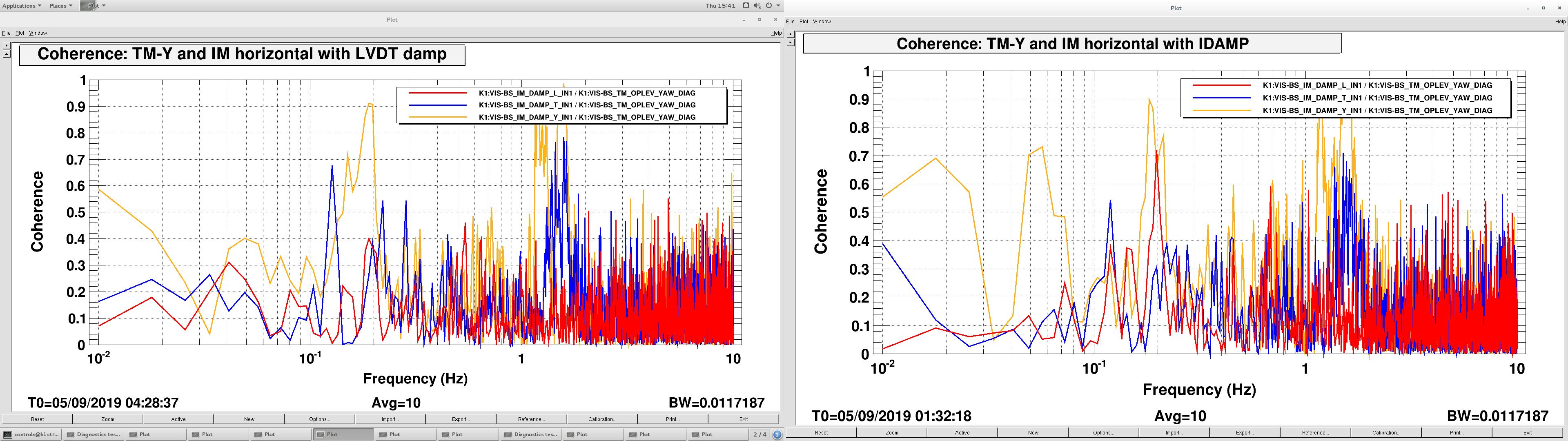
- The coherence between TM-Y and the IM horizontal degrees of freedom is clearly higher with inertial damping. See 4th picture. This also suggests inertial damping is introducing noise.
As a conclusion we can say the inertial damping seems to be introducing additional noise below 100 mHz. According to Terrence this is not surprising because he set a high gain for it. We should use LDVT damping only until a better strategy for inertial damping is implemented. According to entry 9991 the inertial is currently not that effective.
The comparison with the FLOAT state will come later.
Directory:
/kagra/Dropbox/Subsystems/VIS/TypeBData/BS/Noise/Measurements/20190905/
Files:
- BS_ALIGNED_TM_OPLEV_ASD_idamp.xml
- BS_ALIGNED_TM_OPLEV_ASD_no_idamp.xml
- BS_FLOAT_TM_OPLEV_ASD.xml




{kind=link}
{kind=link}
{kind=link}
{kind=link}