In the First version of ID implemented at ETMY, using geophones, I set the blending frequency for L and T at 180 mHz: in this configuration the loops were stable, but seismic noise was not suppressed.
So I tried to implement a new version of ID moving the blending frequency from 180 mHz (in L and T) to 130 mHz.
Before I worked a bit on the optimization of the geophone signal:
1) I added a DC cutoff at 3 mHz
2) An integrator convert the output signal of each geophone into displacement
3) Taking into account that the output signal is displacement, I calibrated the geophones and I measured again the sensing matrix (following the procedure describe in the see klog 8327)
In this way, we should avoid instabilities, crossover oscillation in to the loops, and re-injection of the geophone noise, when we reduce the blending frequency.
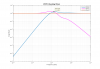
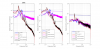
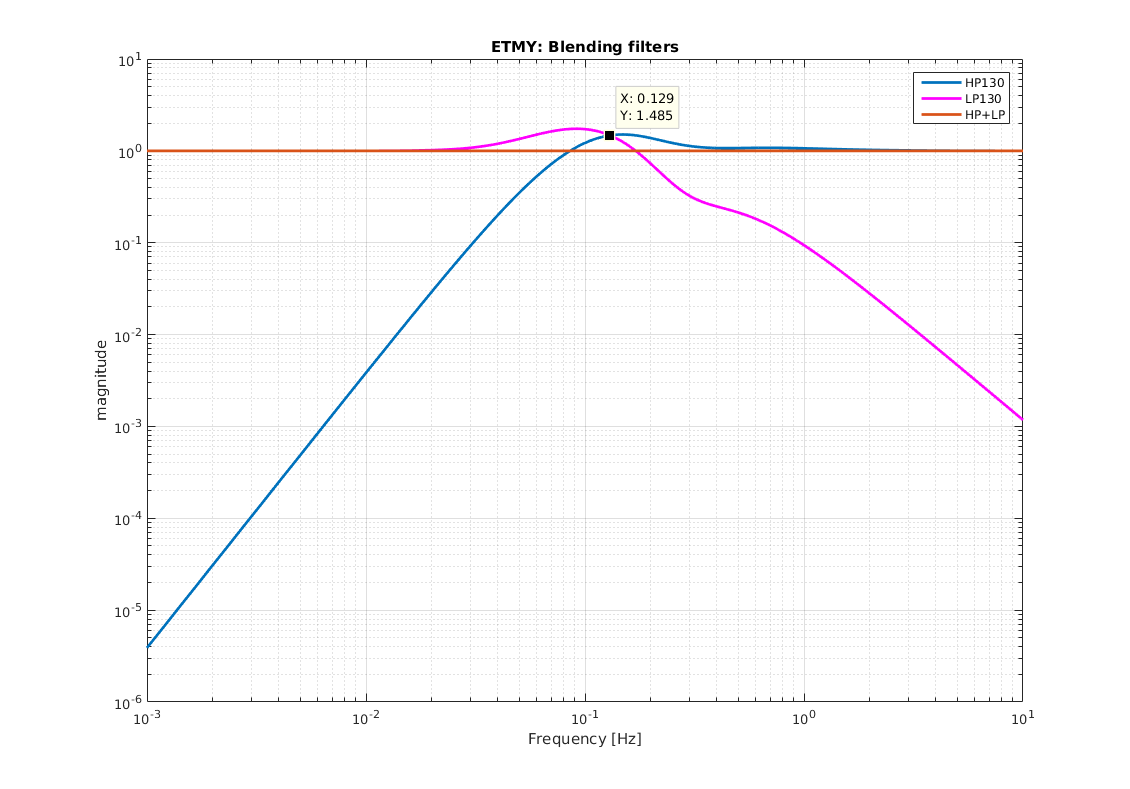
4) I implemented the the new blending frequency (LP130, HP130 Pic1).
5) I turned on the ID only along L and T with UGF at 0.12 mHz.
6) Y is controlled with LVDT.
The loops are stable.
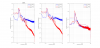
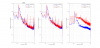
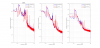
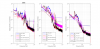
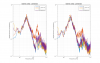
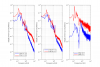
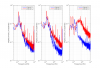
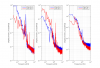
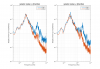
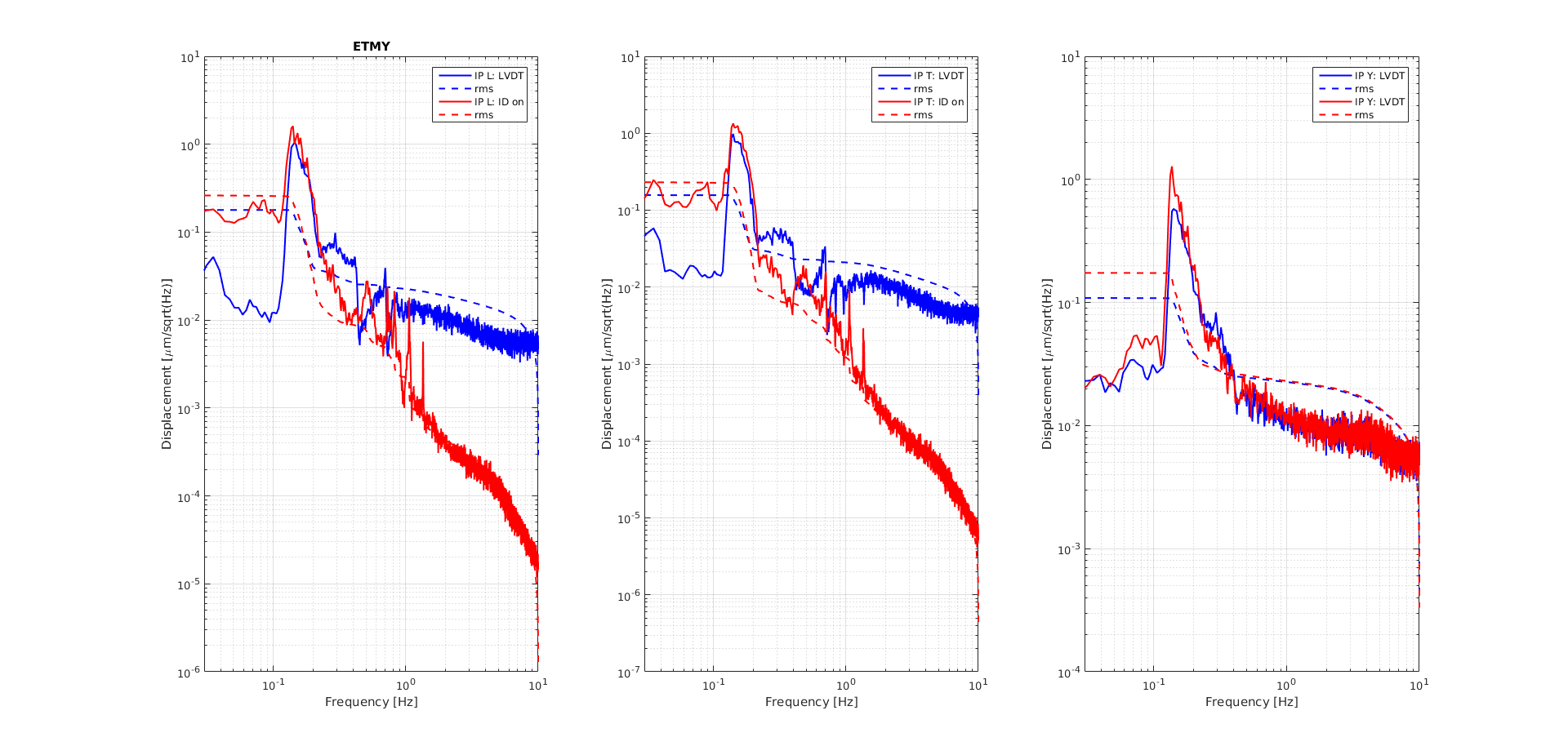
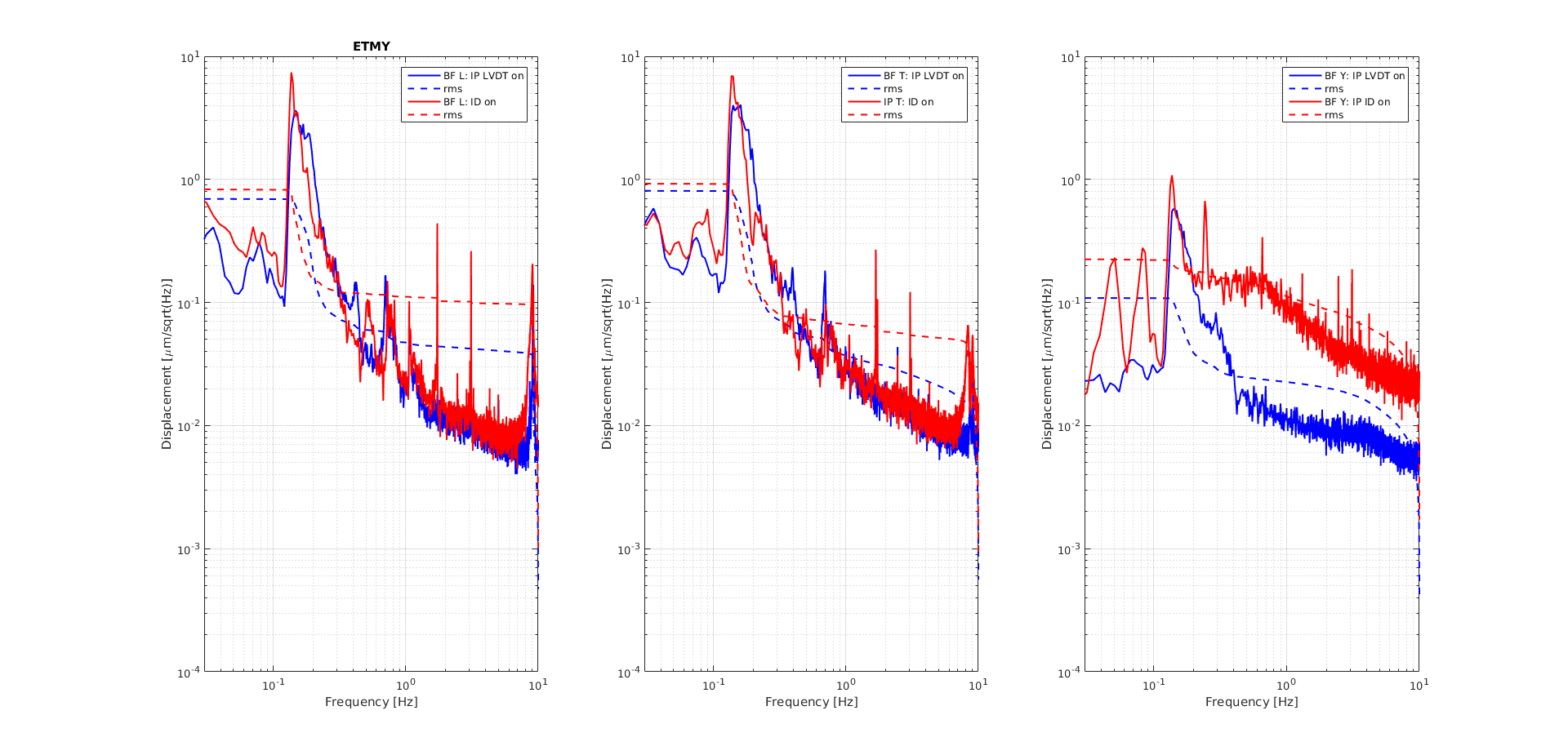
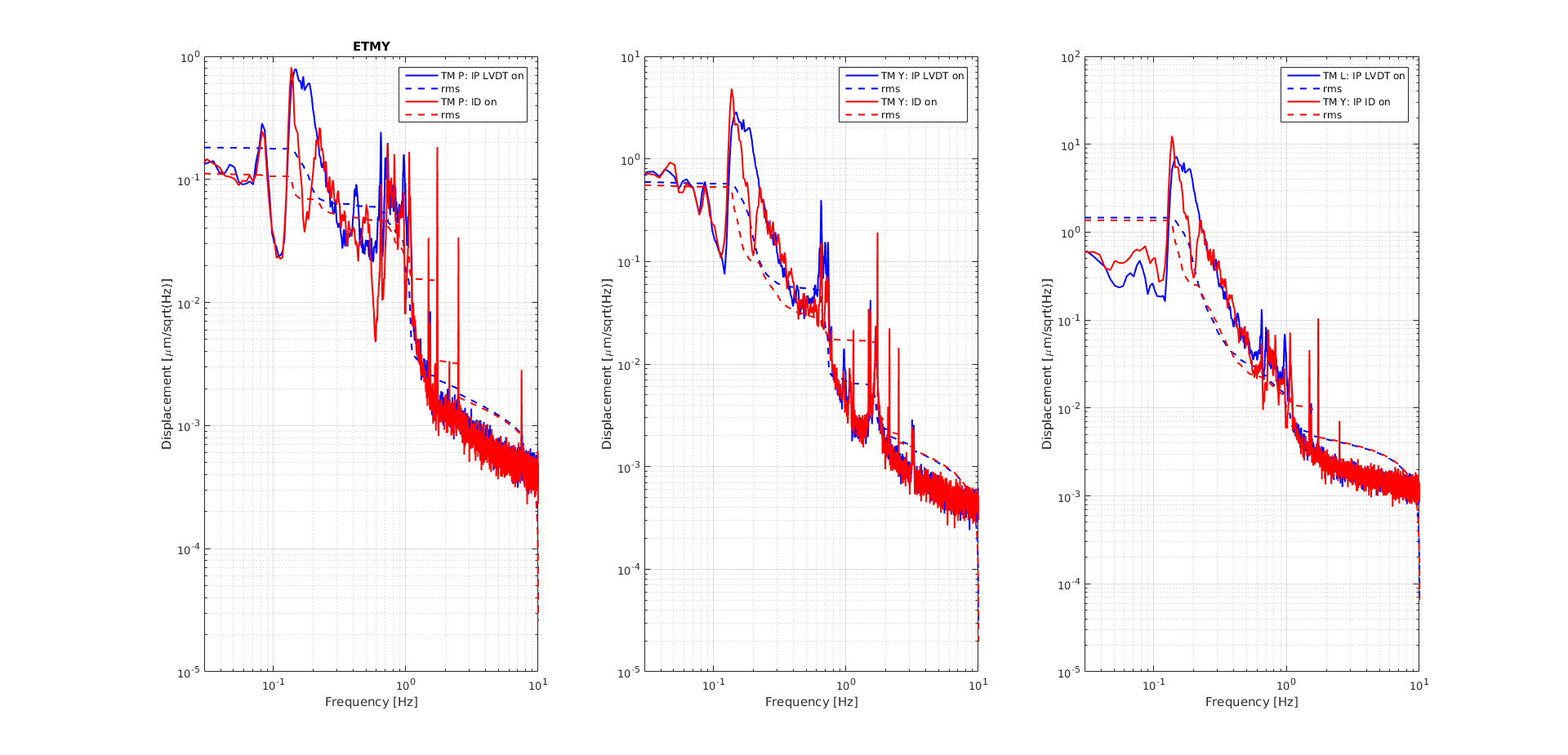
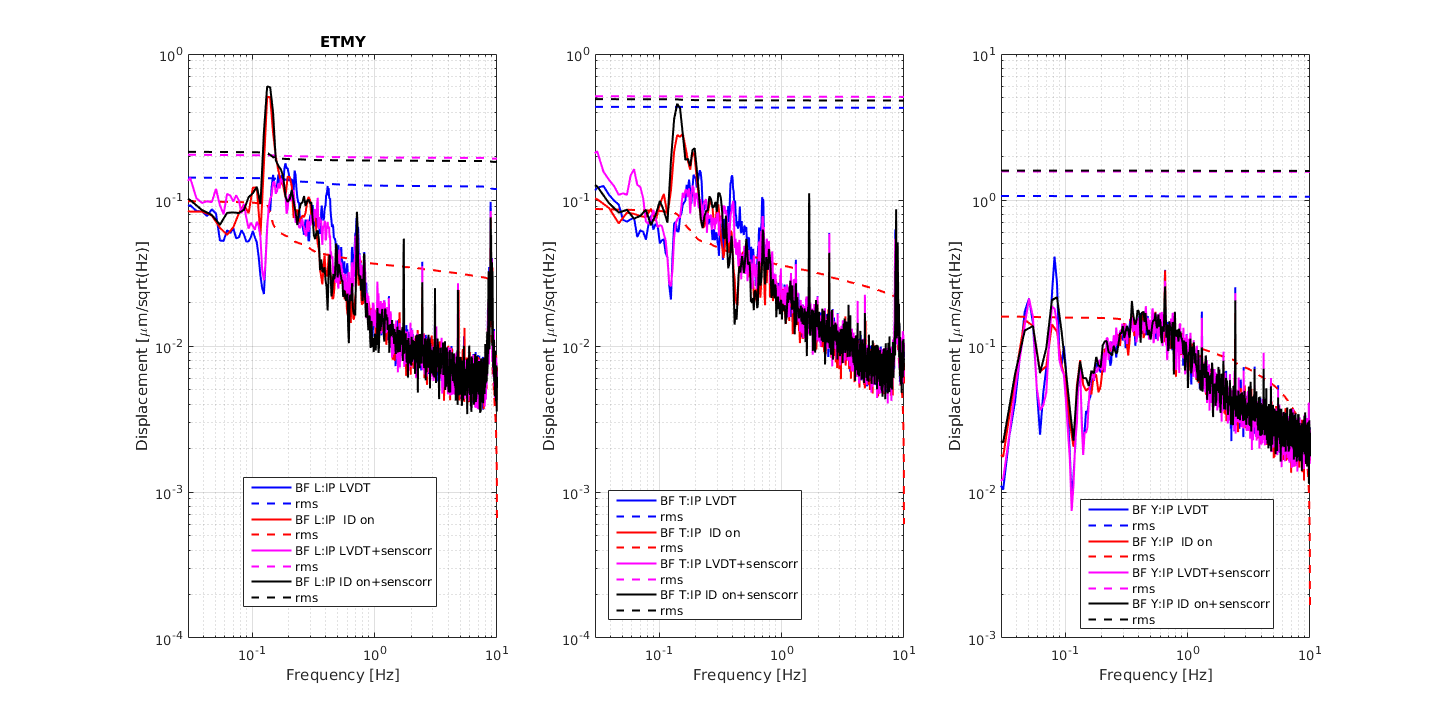
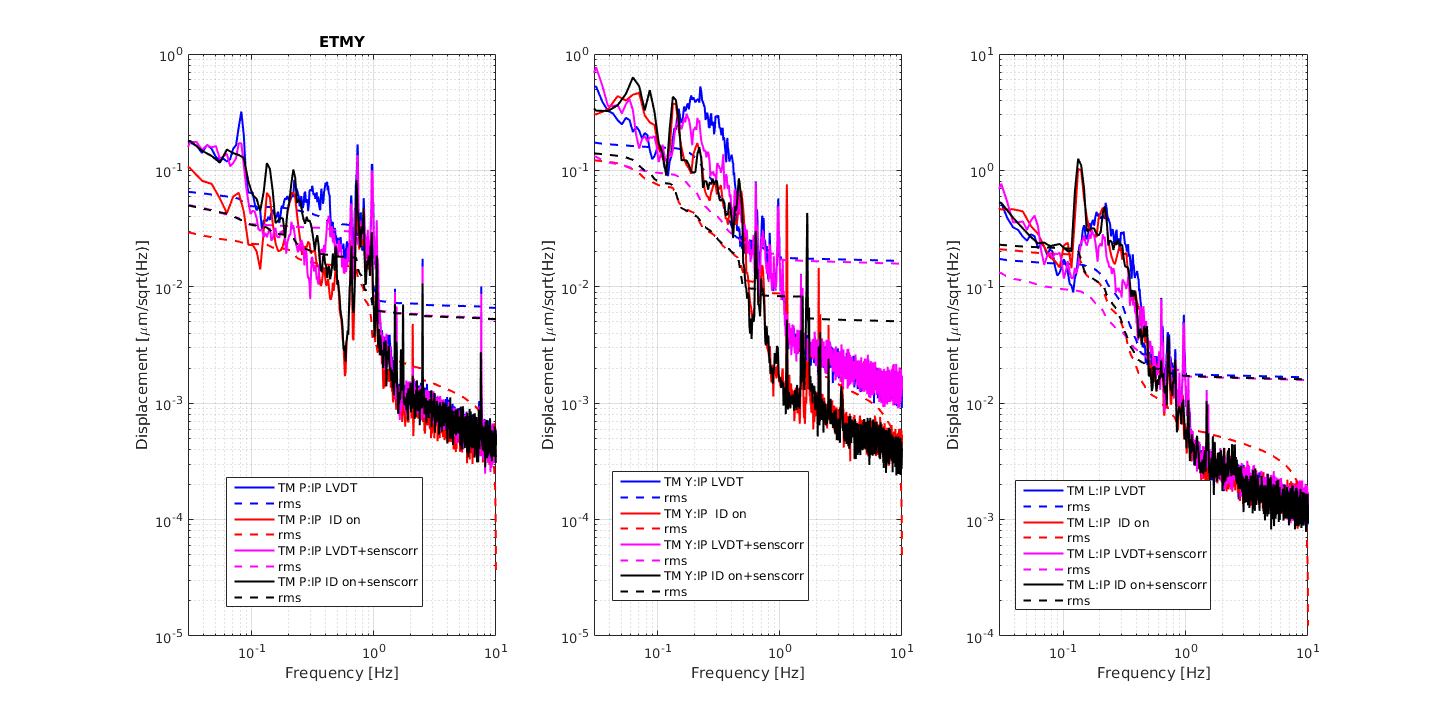
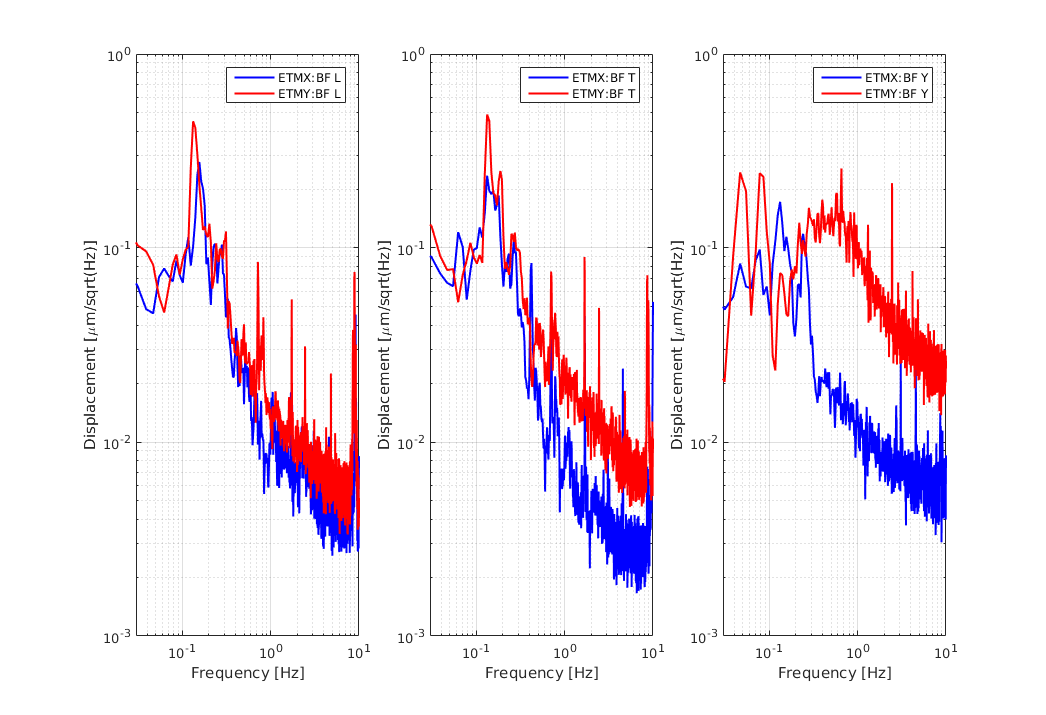
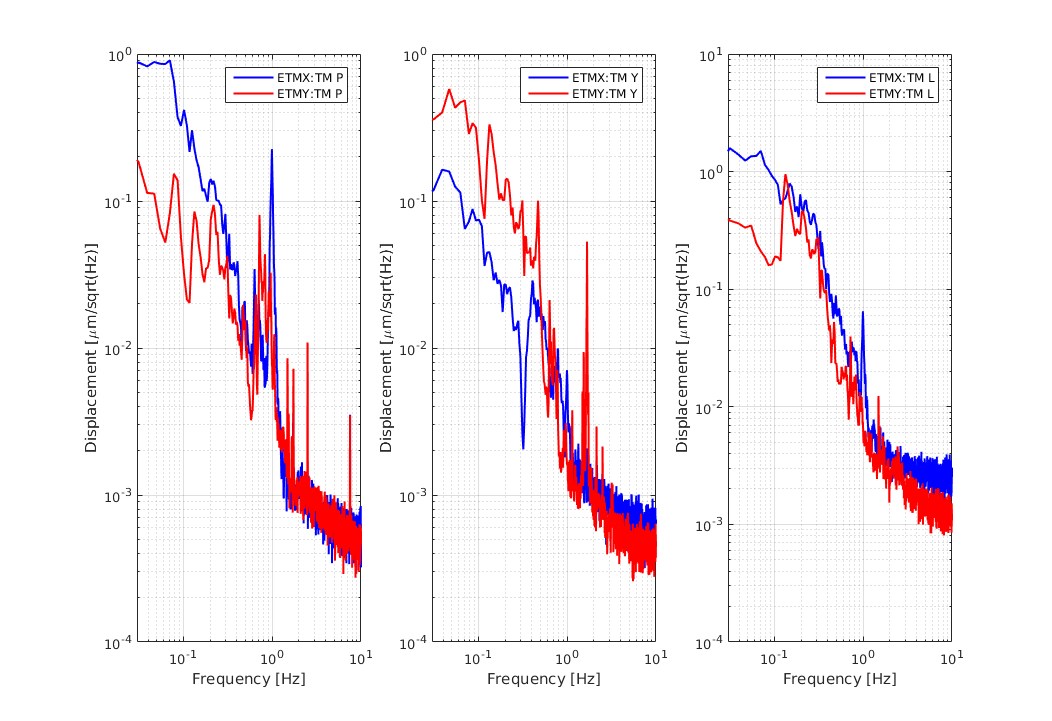
In Pic 2, Pic2 and Pic4 the SPectra of IP (with and without ID), BF (L,T,Y) and TM (P,Y,L) are shown.
We can see that
1) the residual motion and RMS of TM and BF (L and T) in both configuration are not so differents, whil BF Yaw has a strange shape: to investigate.
2) From 0.1 to 0.3 TM P, Y and L motion is reduced because of the ID, but the peack at 150 mHz is dominat.
Note: In both configuaration BF_L , BF_T damping loops and the IP sensor correction were also turned on.
%% RMS values
| IP | BF | |
| ID: rms L | 0.2 micrometers | 0.8 micrometers |
| ID rms T | 0.2micrometers | 0.8 micrometers |
| ID: rms Y | 0.2 microradians | 0.2 microradians |
| LVDT: rms L | 0.15 micrometers | 0.8 micrometers |
| LVDT: rms T | 0.15micrometers | 0.8 microradians |
| LVDT: rms Y | 0.2 microradians | 0.1 micrometers |
| TM: rms P | ID: 0.1 micrometers | LVDT:0.1 microradians |
| TM : rms Y | ID: 0.1 micrometers | LVDT: 0.1 microradians |
| TM: rms L | ID: 1.1 microradians | LVDT: 1.1 micrometer |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}