with Fabian
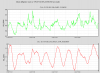
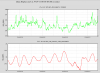
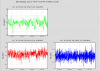
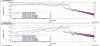
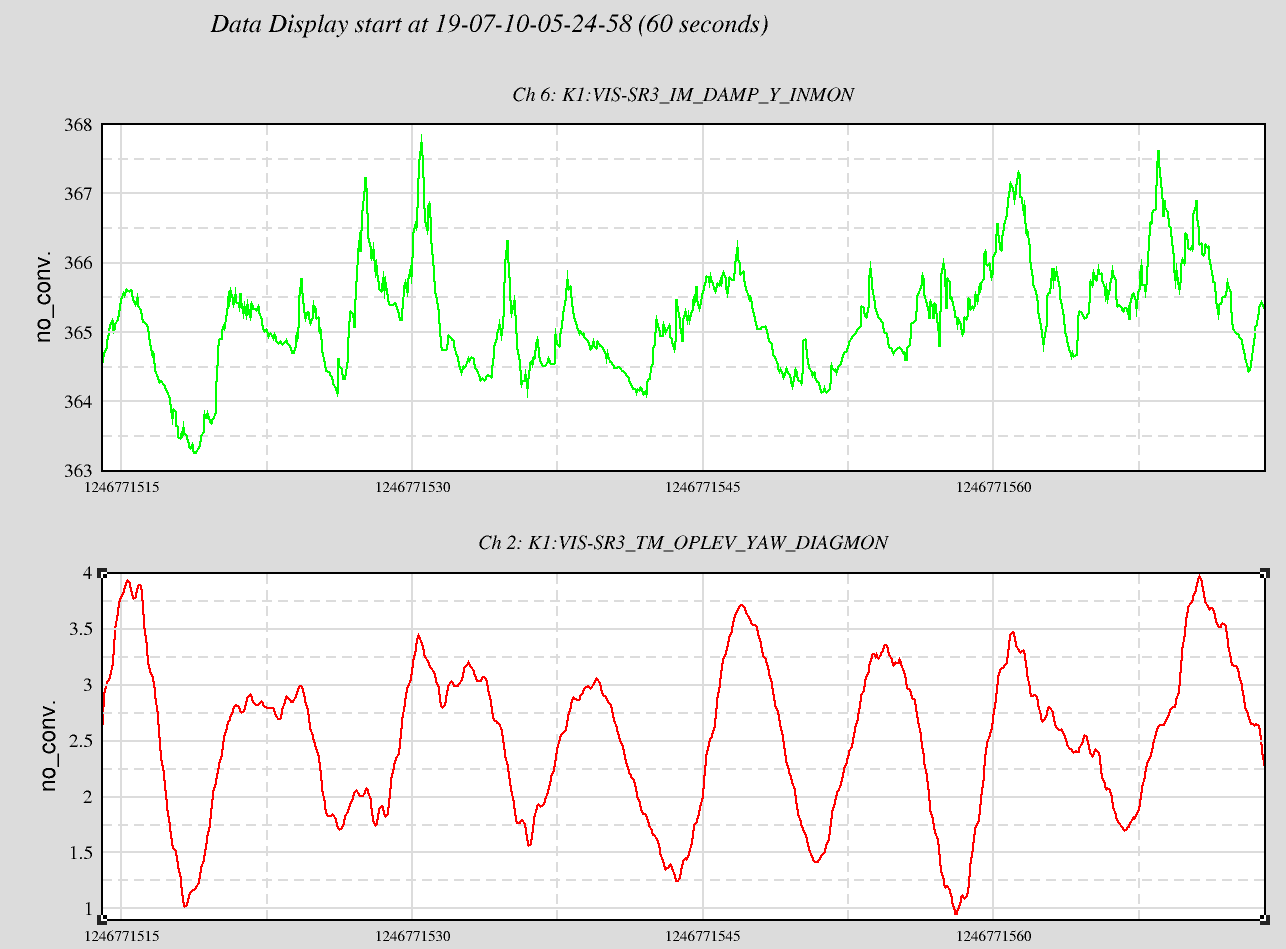
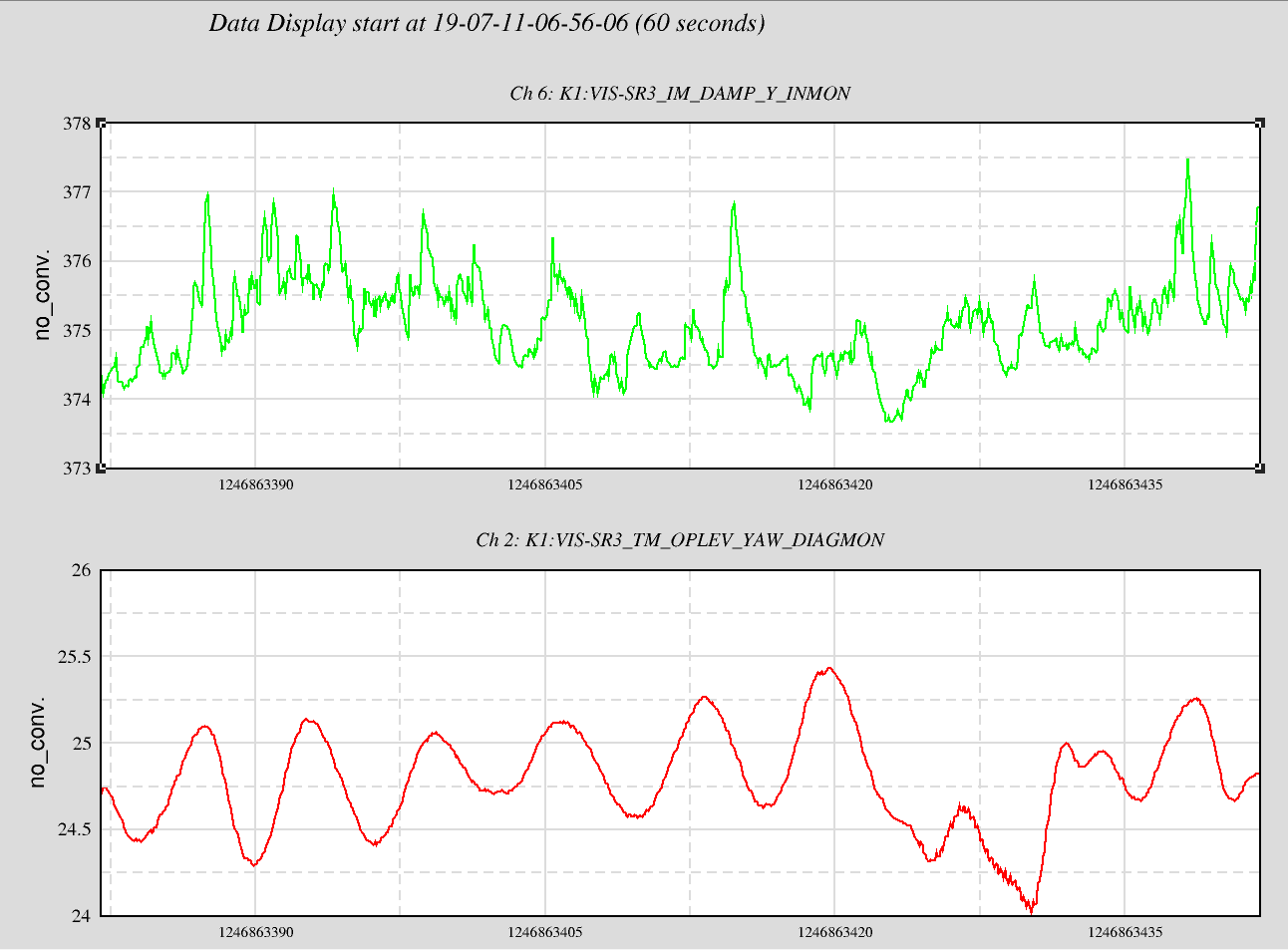
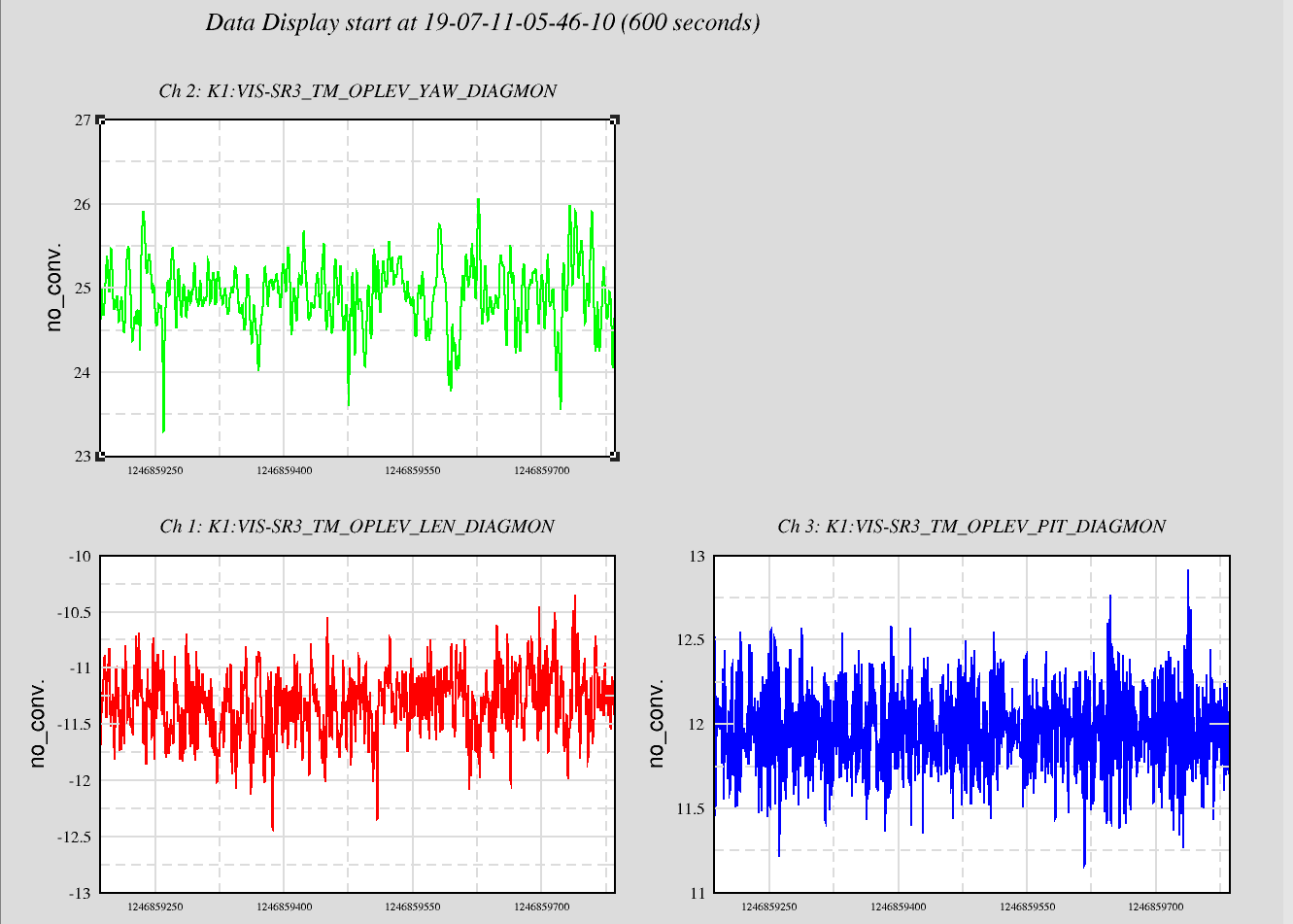
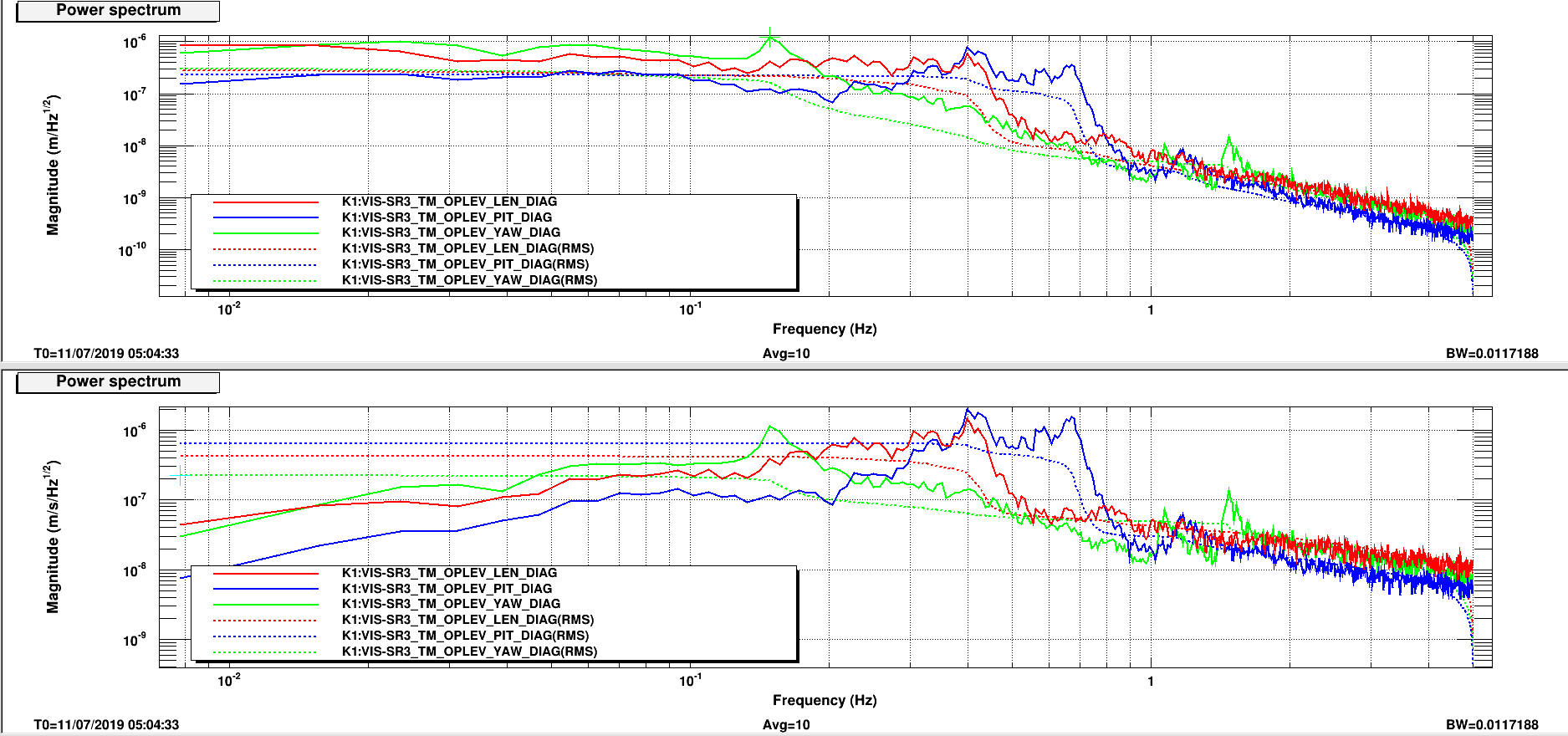
To study this residual motion, I plotted the time series of both IM yaw and TM yaw and I discovered strange behavior in the IM Y. Basically, what I discovered is that there were fast transients in the IM Y channel. When that happens, the TM Y is kicked by the IM local control and starts to oscillate. This was why one of the yaw mode was continuously being excited. See figure 1 for reference. I decided to turn off the IM yaw local control and the TM Y oscillation reduced from ~4 µrad peak-to-peak (figure 1) to ~1 µrad (figure 2). I also measured the same residual motion in amplitude spectrum and in time series again as a comparison to yestarday's plot. see figure 3 and figure 4. The yaw rms displacement decreased to the 0.3 µrad level and velocity to 0.2 µrad/s level so there is clearly improvement in residual motion despite a clear peak at 0.14 Hz can still be observed. From the 10 minutes time series, peak-to-peak yaw amplitude is around 2.5 µrad as opposed to yestarday's 6 µrad.
Fabian discovered that the the IM H2 is way more noiser than the IM H3 and the cause of this issue is to be investigated.
Enomoto-san pointed out that the IM2TM OL DC yaw control might be marginally stable and that could further worsen the situation. So, I measured IMY to TMY transfer function and carefully design the filter again to make sure that there is enough phase margin at 0.14 Hz. This lowered the rising time of the control so it takes much longer for the TM for be aligned.
{kind=link}
{kind=link}
{kind=link}
{kind=link}