With Fabian,
The SR3 hadn't had an optical lever windshield for past period and could potentially jeopardize the lock of the DRMI because the residual motion and TM damping was not properly studied. Therefore, Fabian and I decided to put on a windshield on the SR3 OL. After that I measured the spectrum of the TM motion to confirm that the diaognalization matrix is still good.
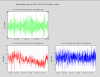
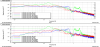
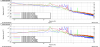
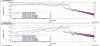
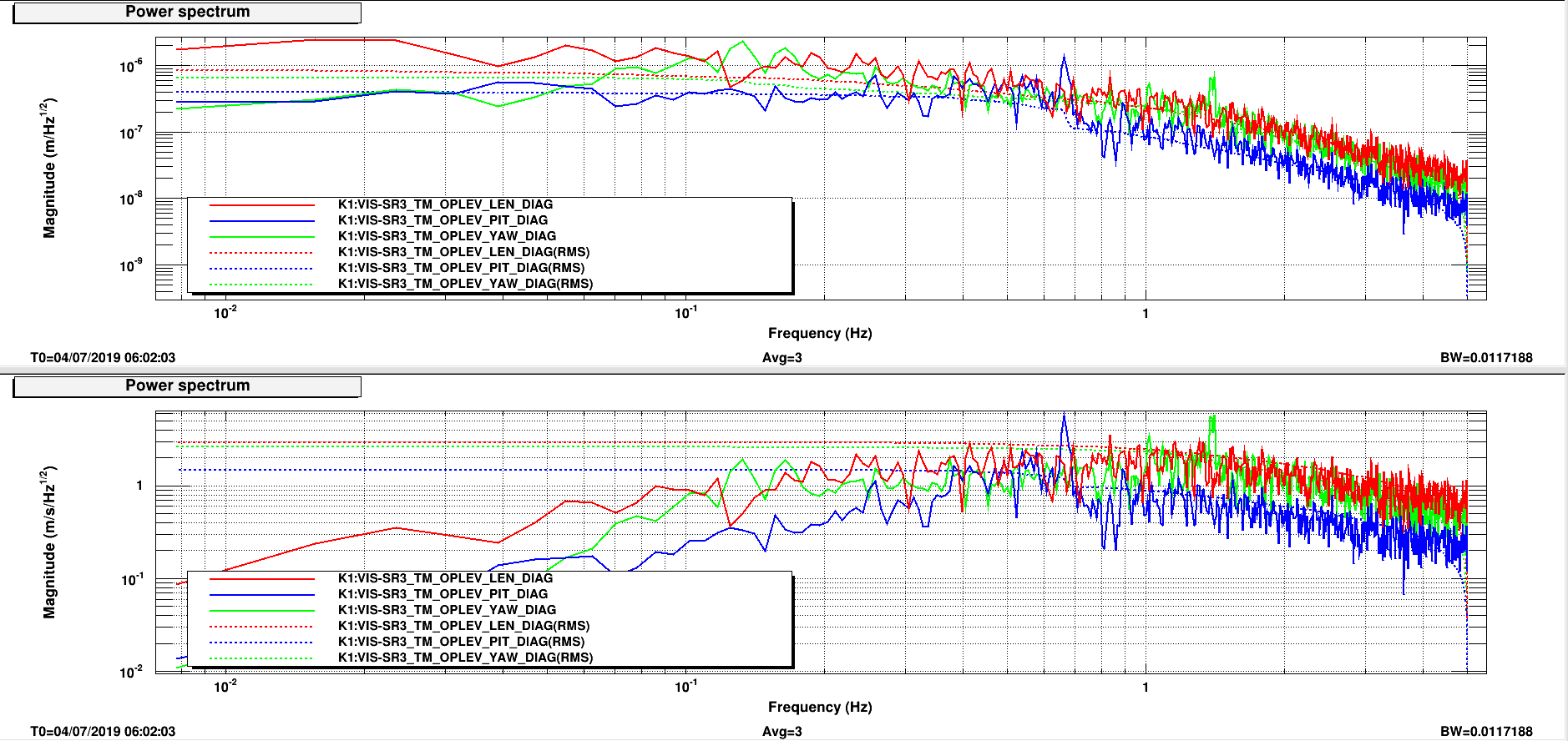
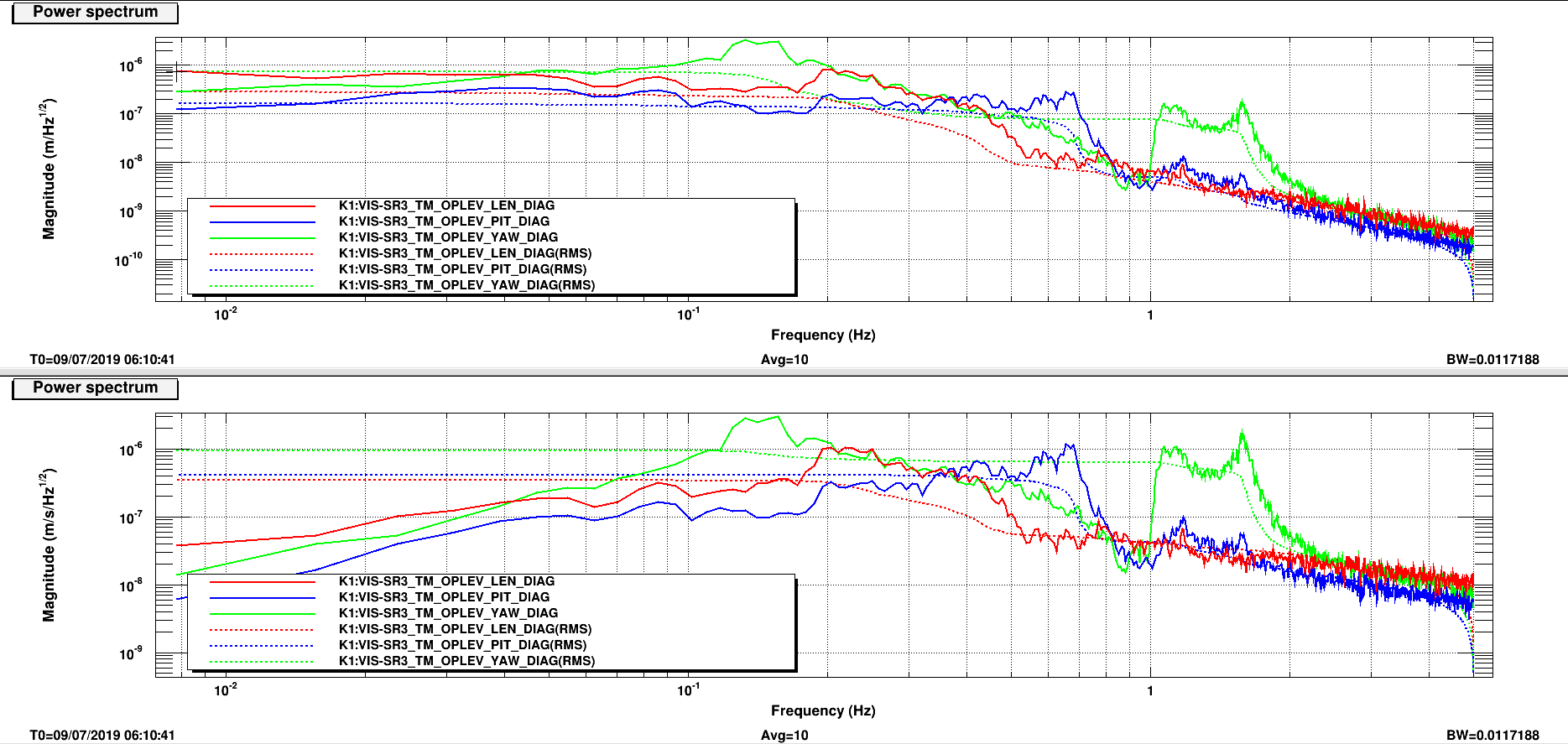
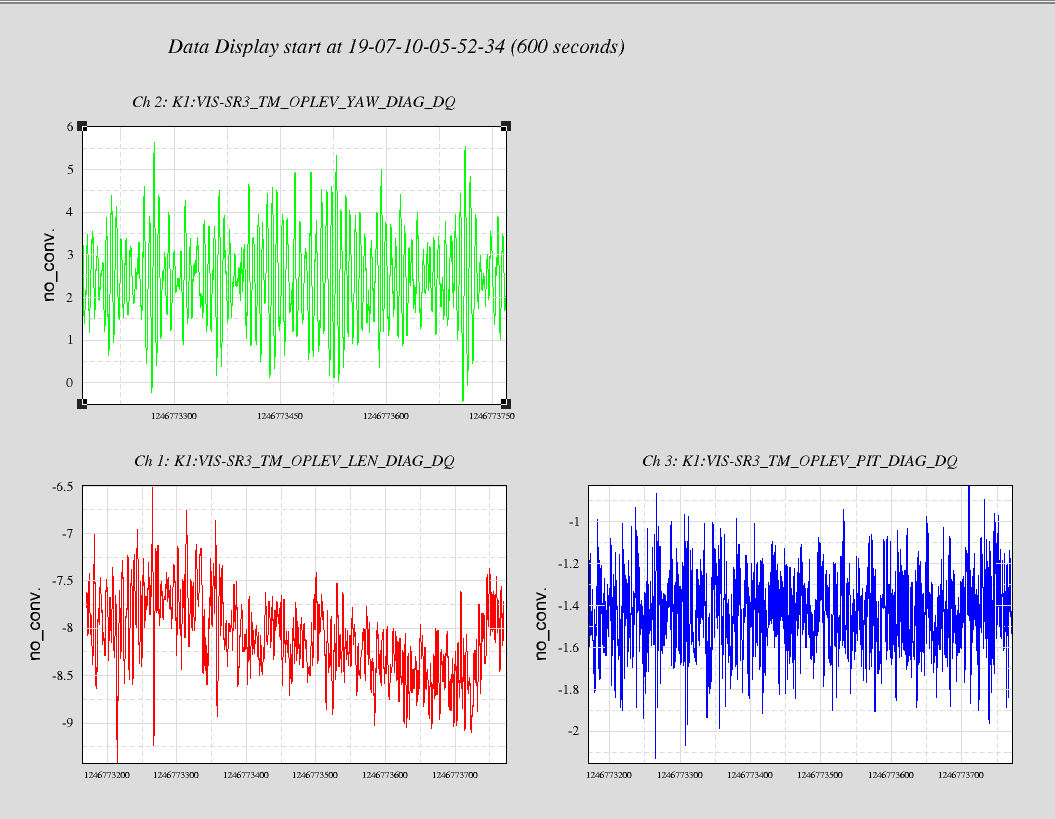
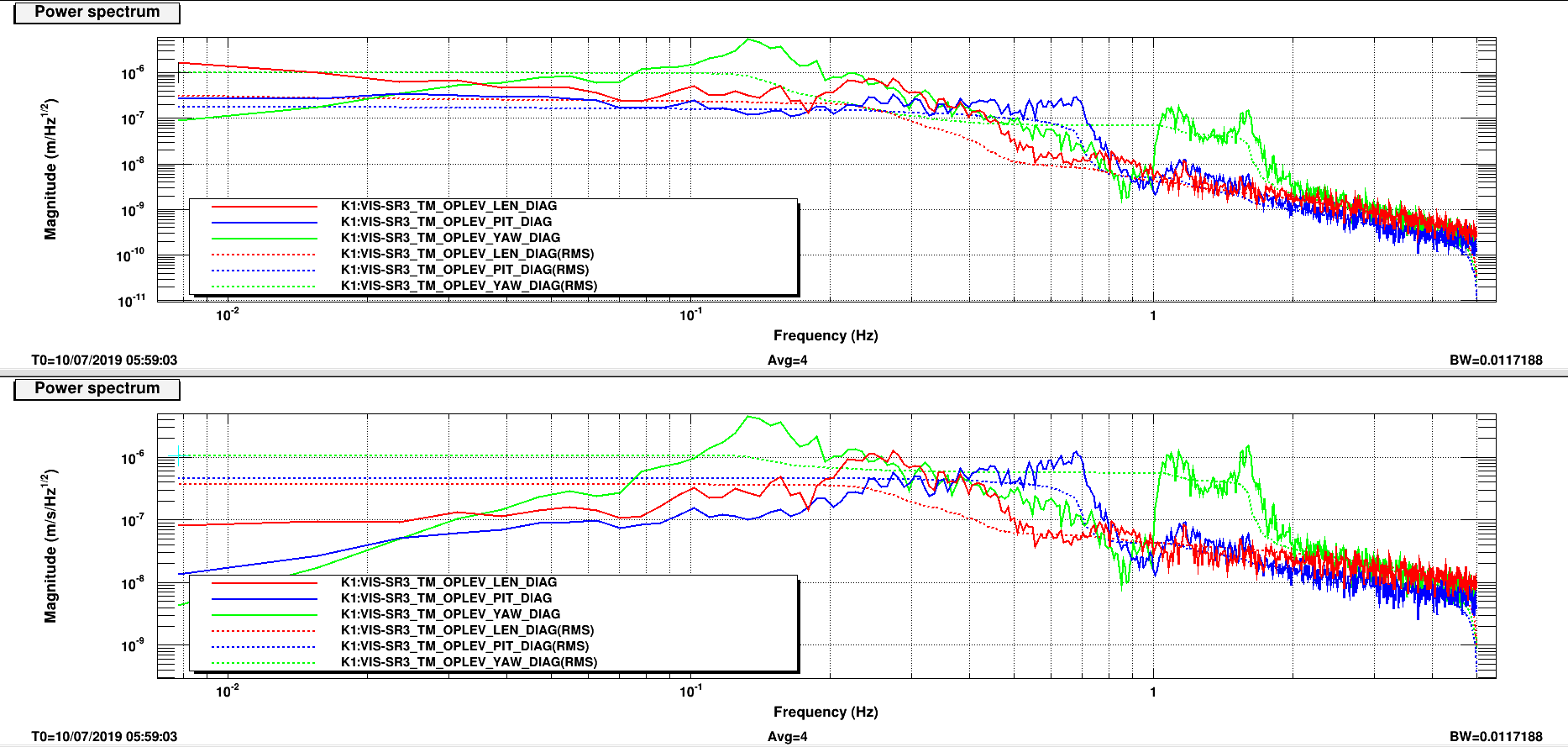
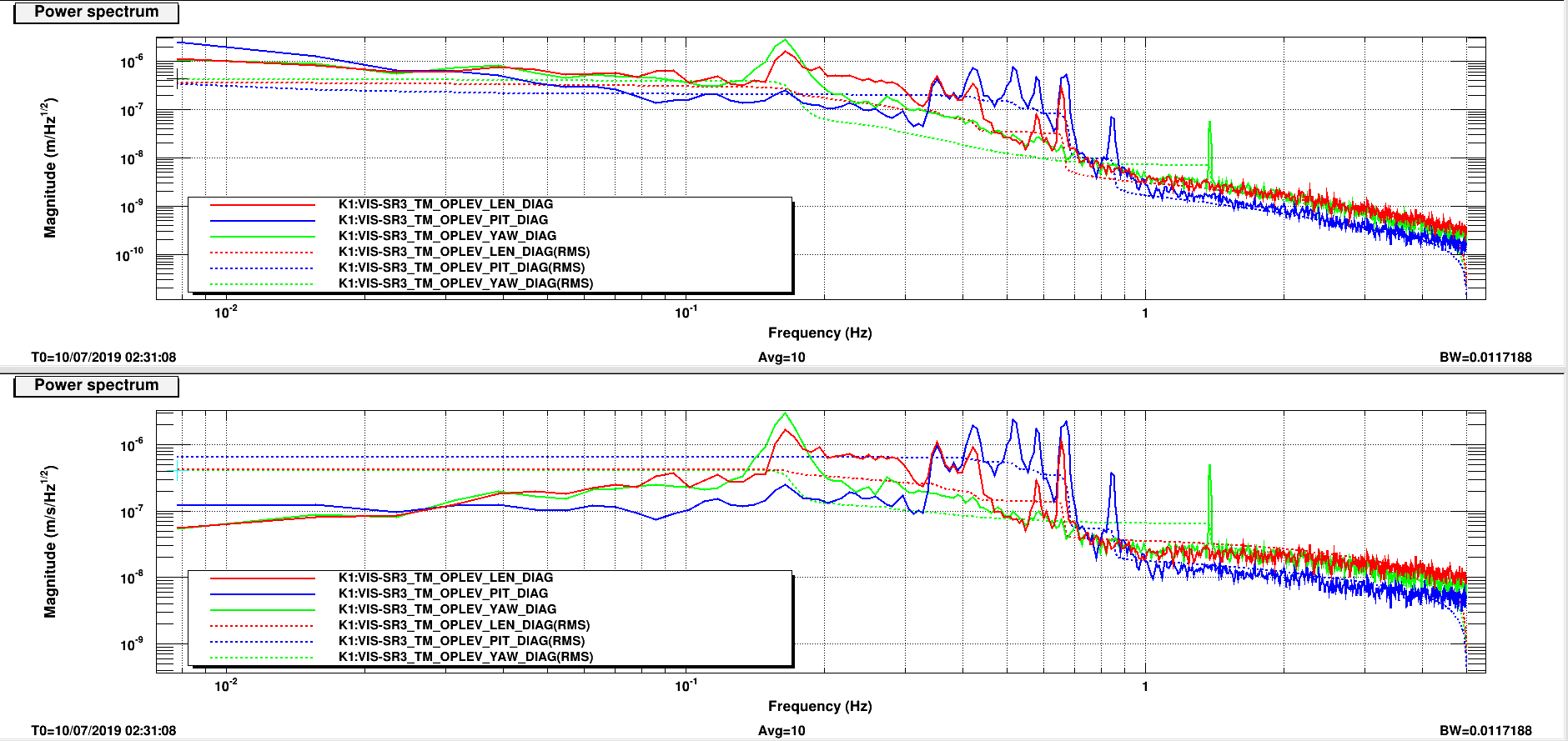
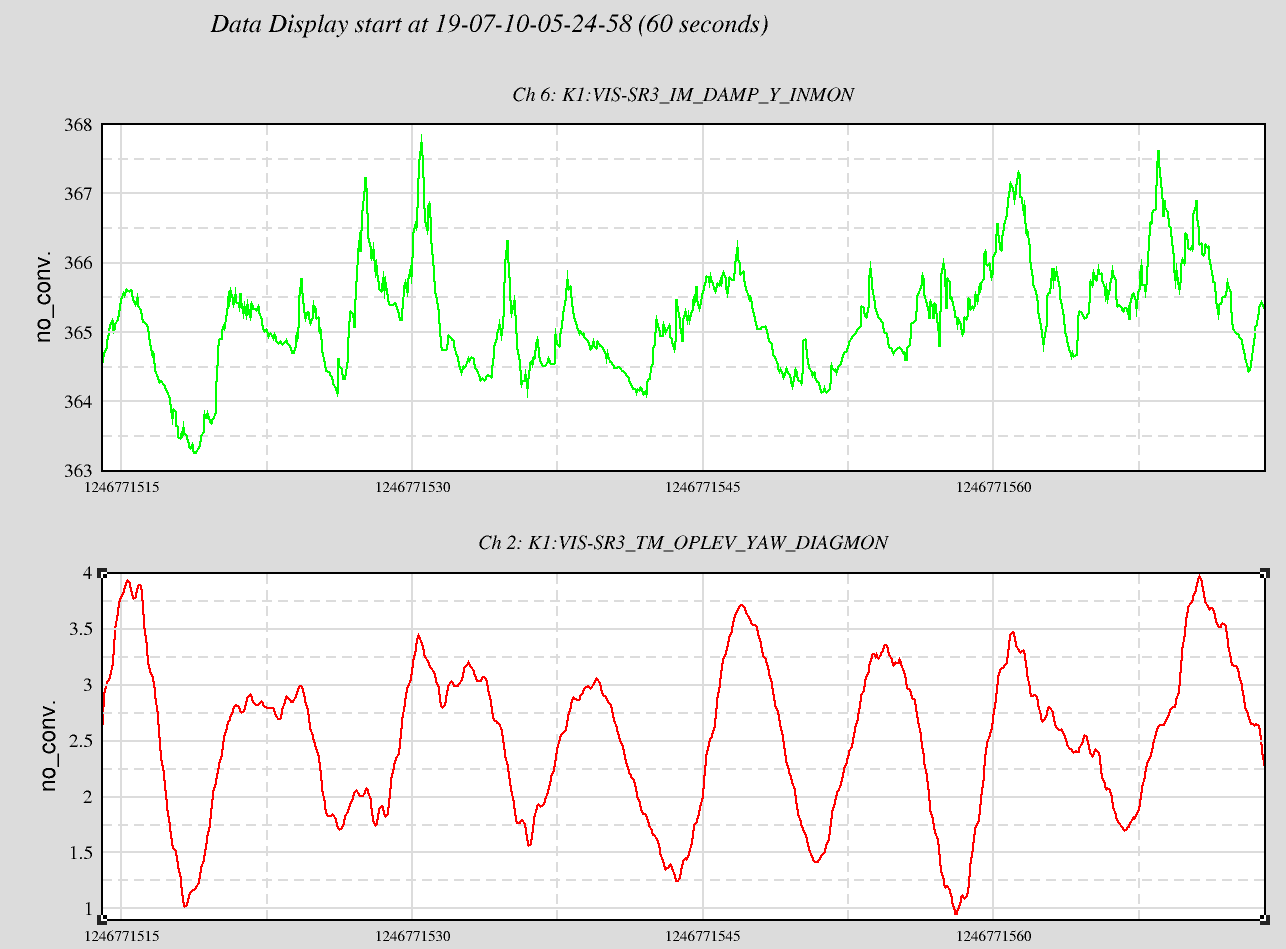
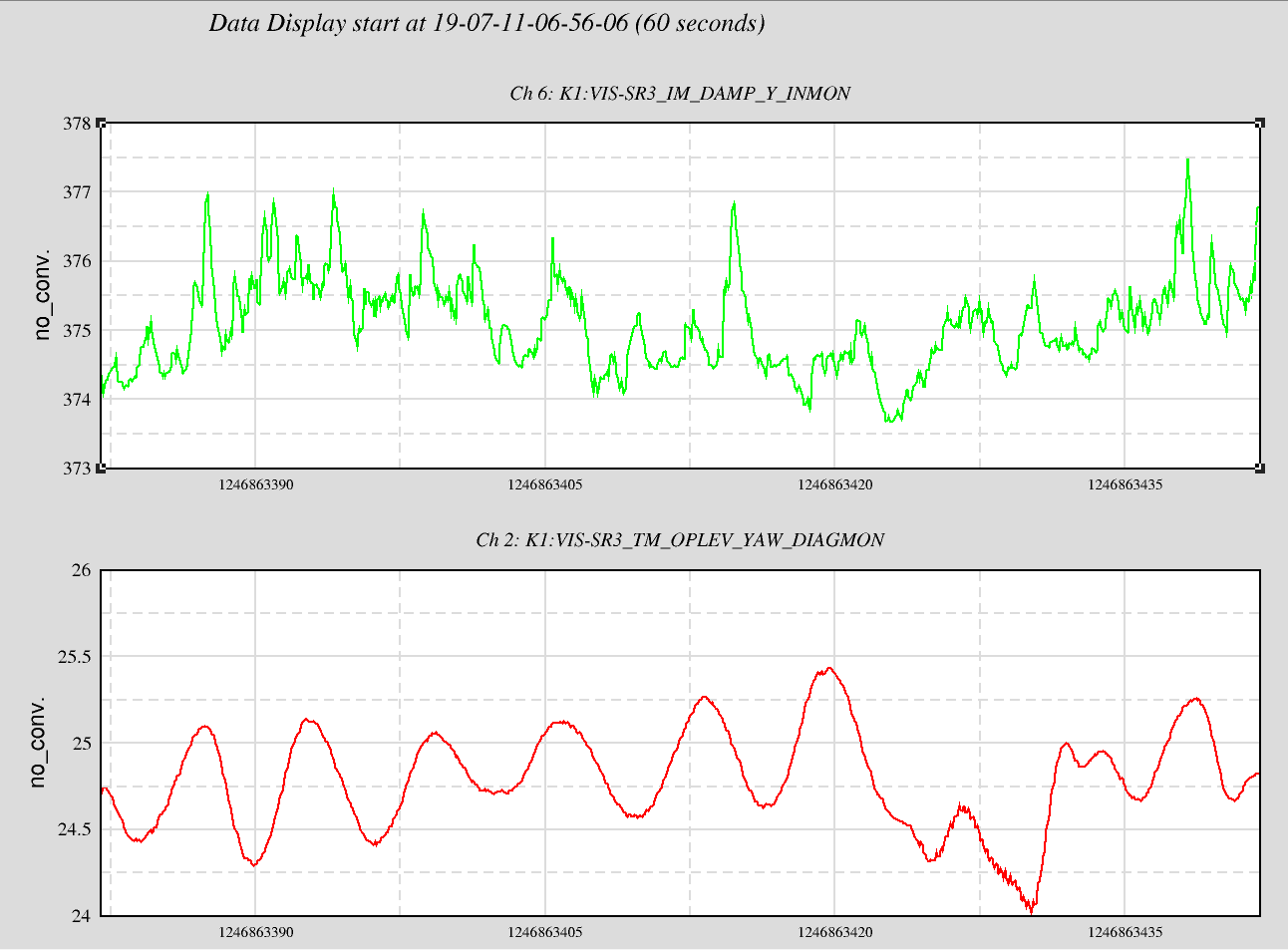
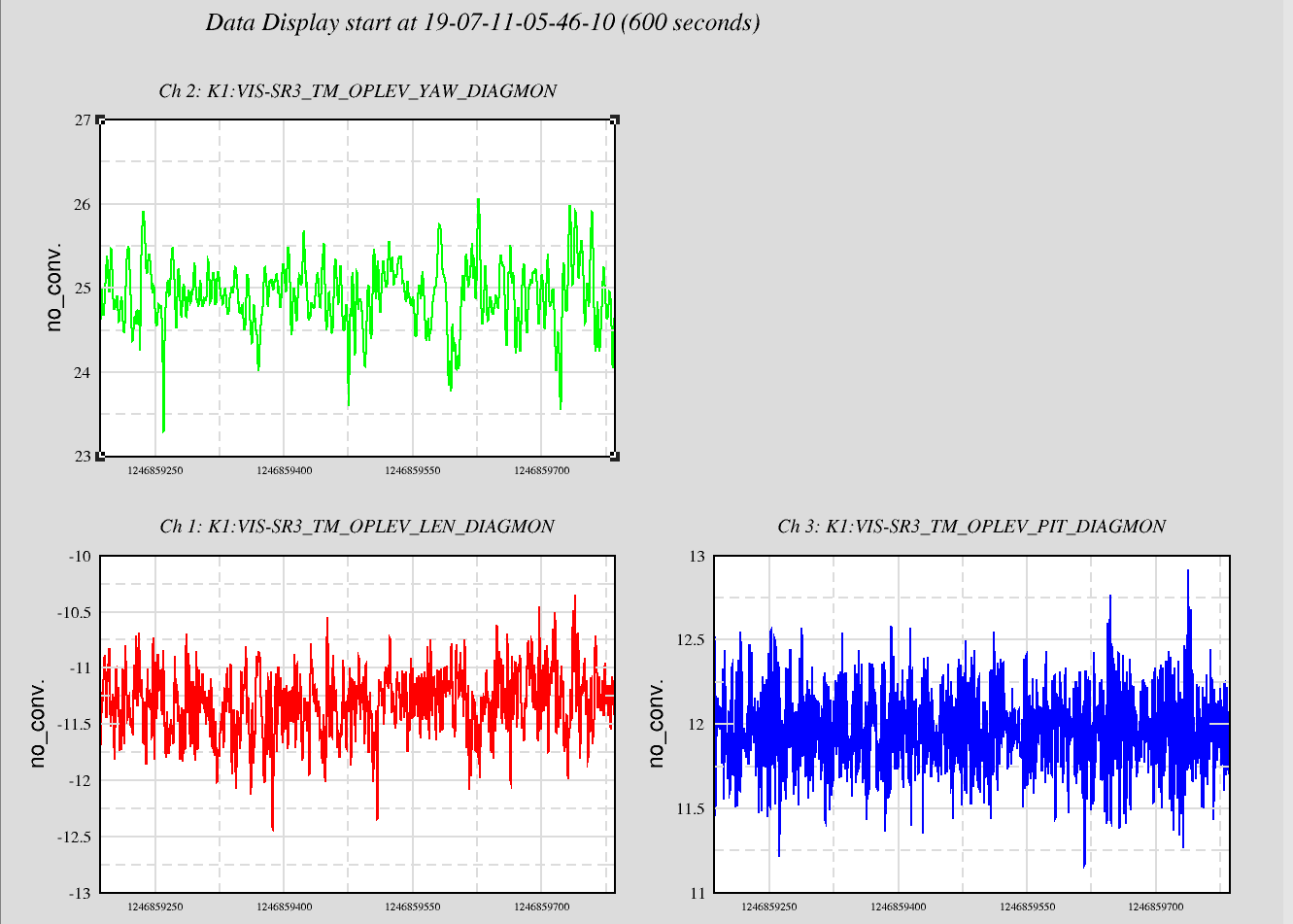
I measured the residual motion before putting on the windshied and after. See figure 1 and 2. The measurements were done with all damping filters on.
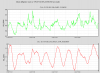
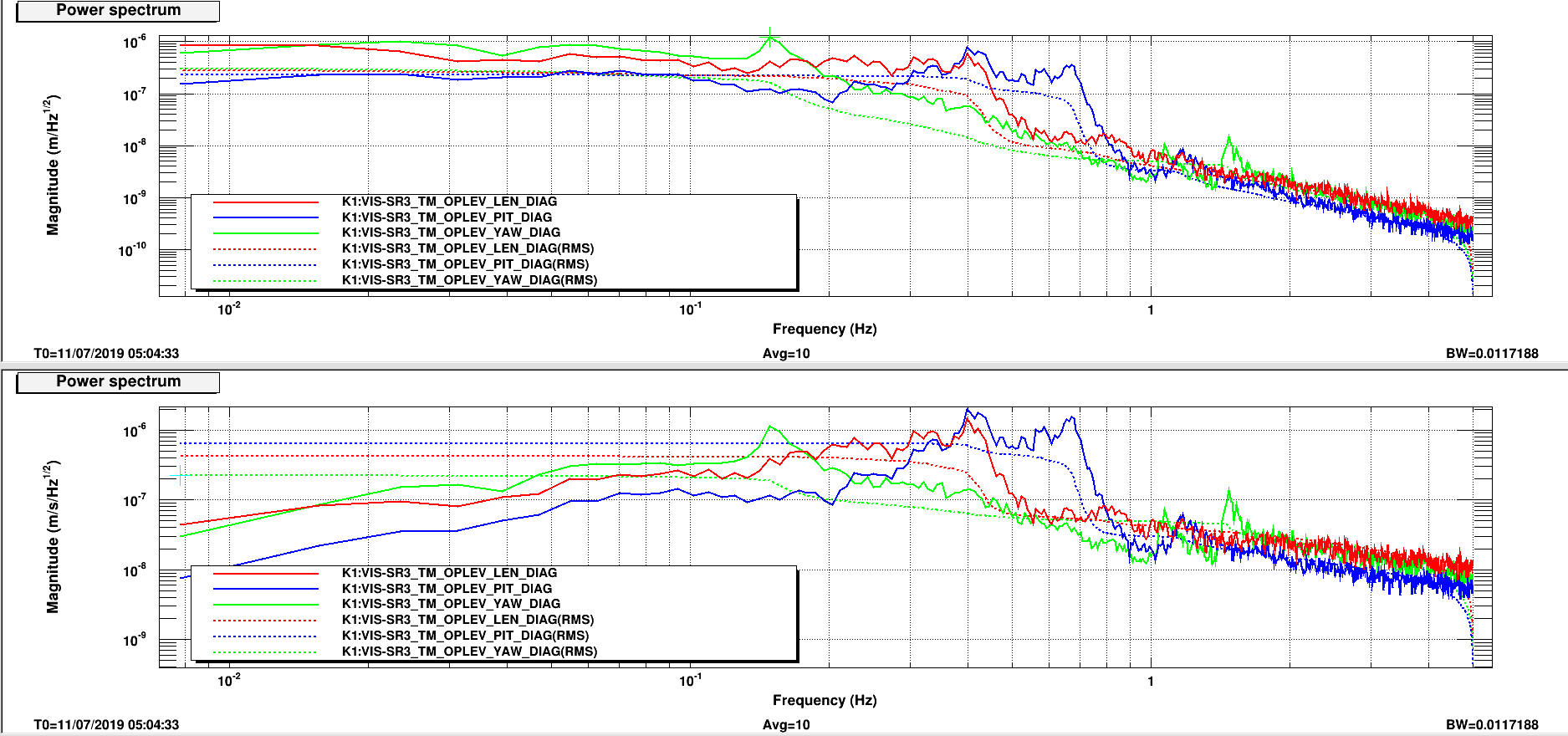
Comparing the two results, we can clearly see suppression in L and P. But not so much in Y. The yaw residual displacment is dominated by motion/noise from 0.14 - 0.2 Hz. I tried implementing TM damping filter to reduce that motion but failed. I am clueless at the moment and I don't know how to further reduce suppress that motion in a short period.
Nevertheless, the measurements confirm that the SR3 satisfies the residual displacement and velocity requirement.
| Requirement | Result | |
| Longitudinal | 0.4 µm | 0.292µm |
| Pitch | 1 µrad | 0.164 µrad |
| Yaw | 1 µrad | 0.733 µrad |
| Requirement | Result | |
| Longitudinal | 0.5 µm/s | 0.347 µm/s |
| Pitch | / | 0.417 µrad/s |
| Yaw/ | / | 0.941 µrad/s |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}