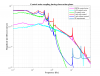
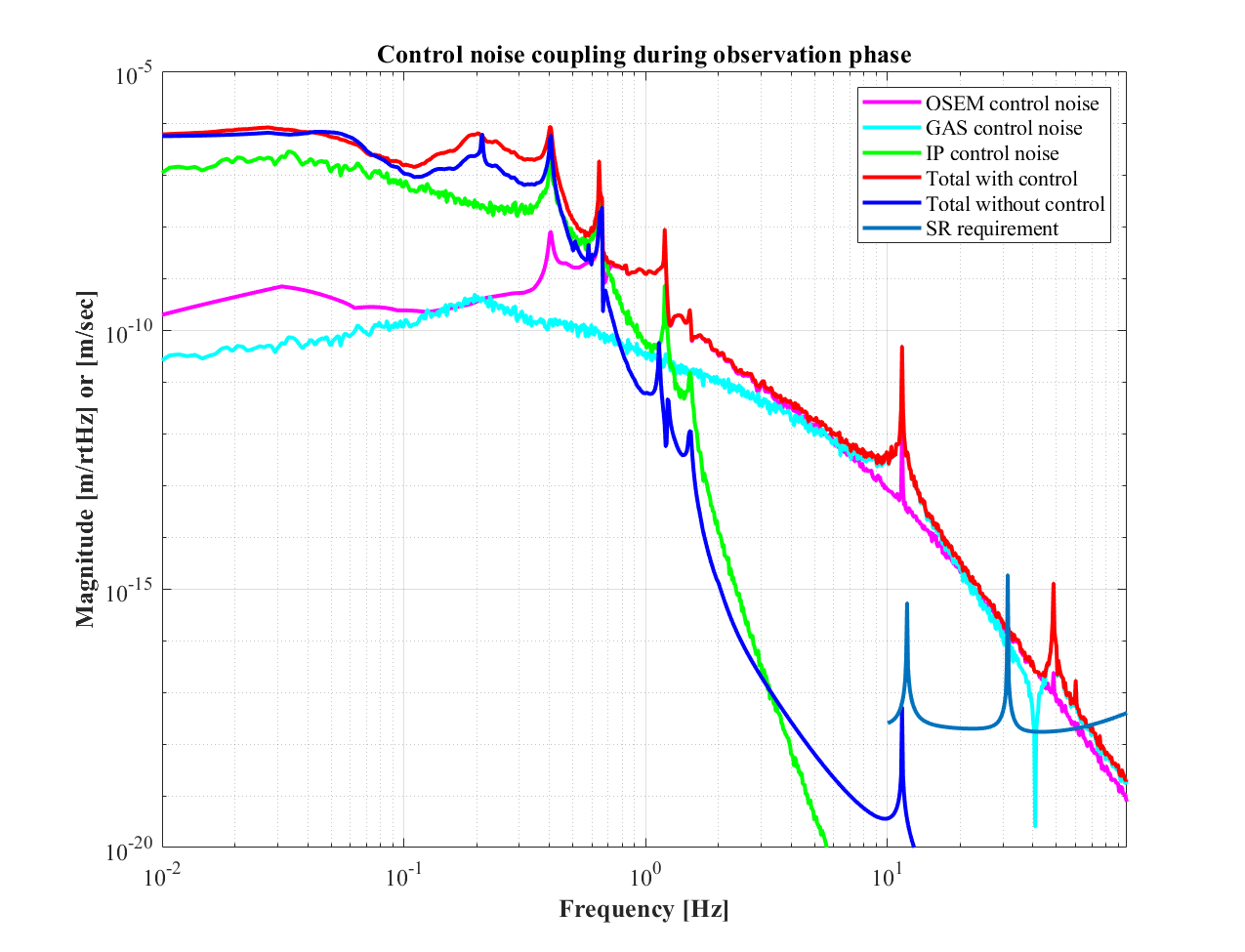
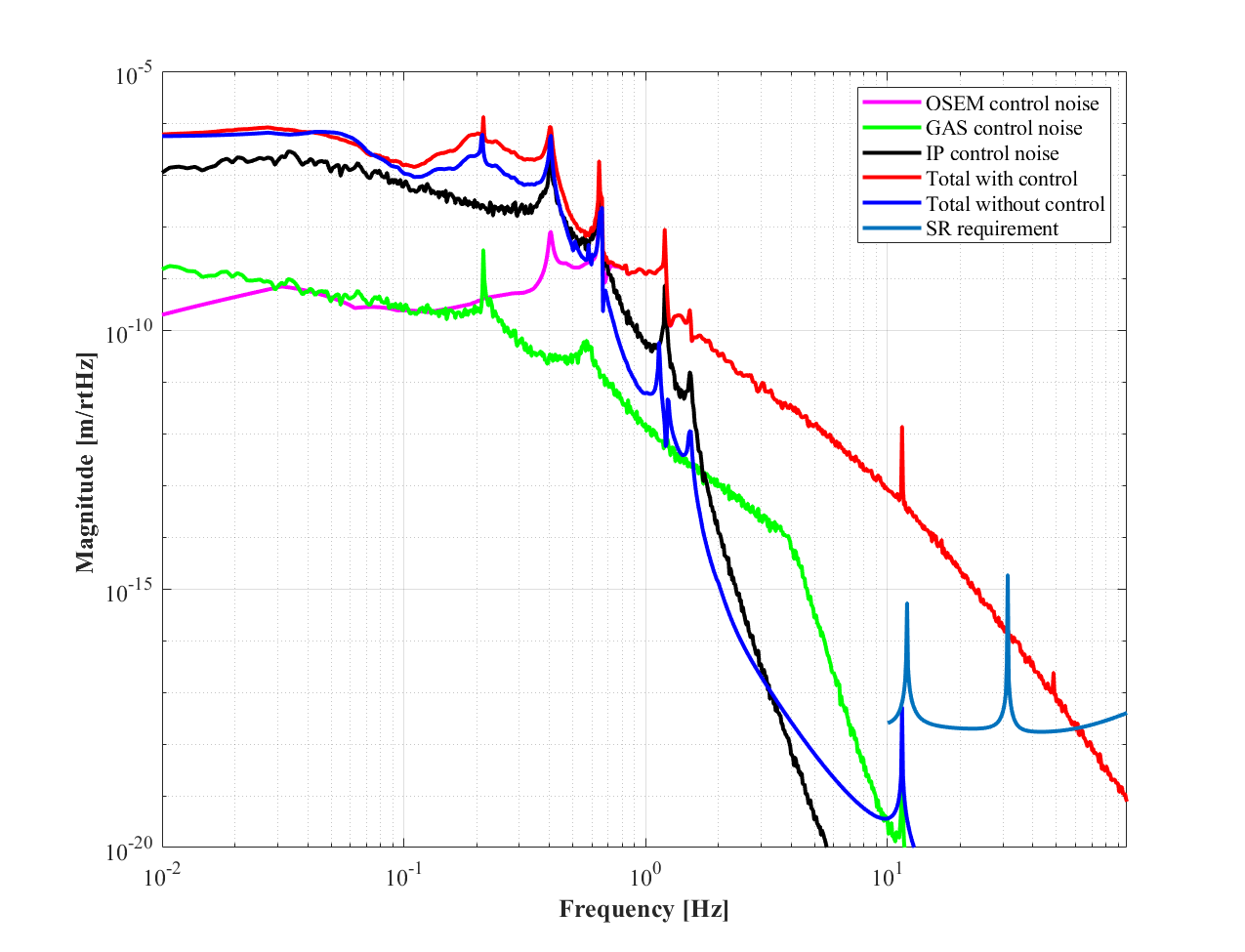
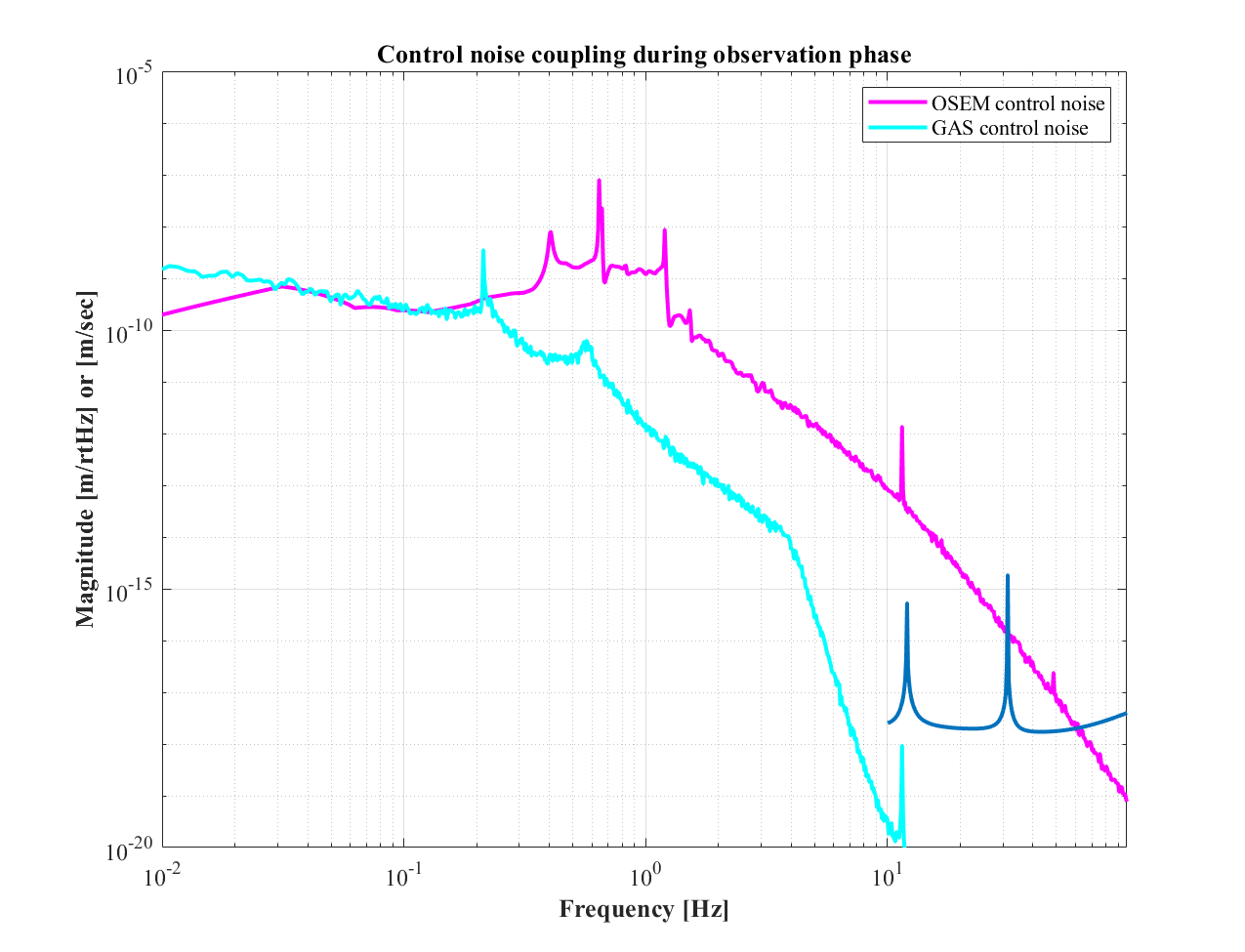
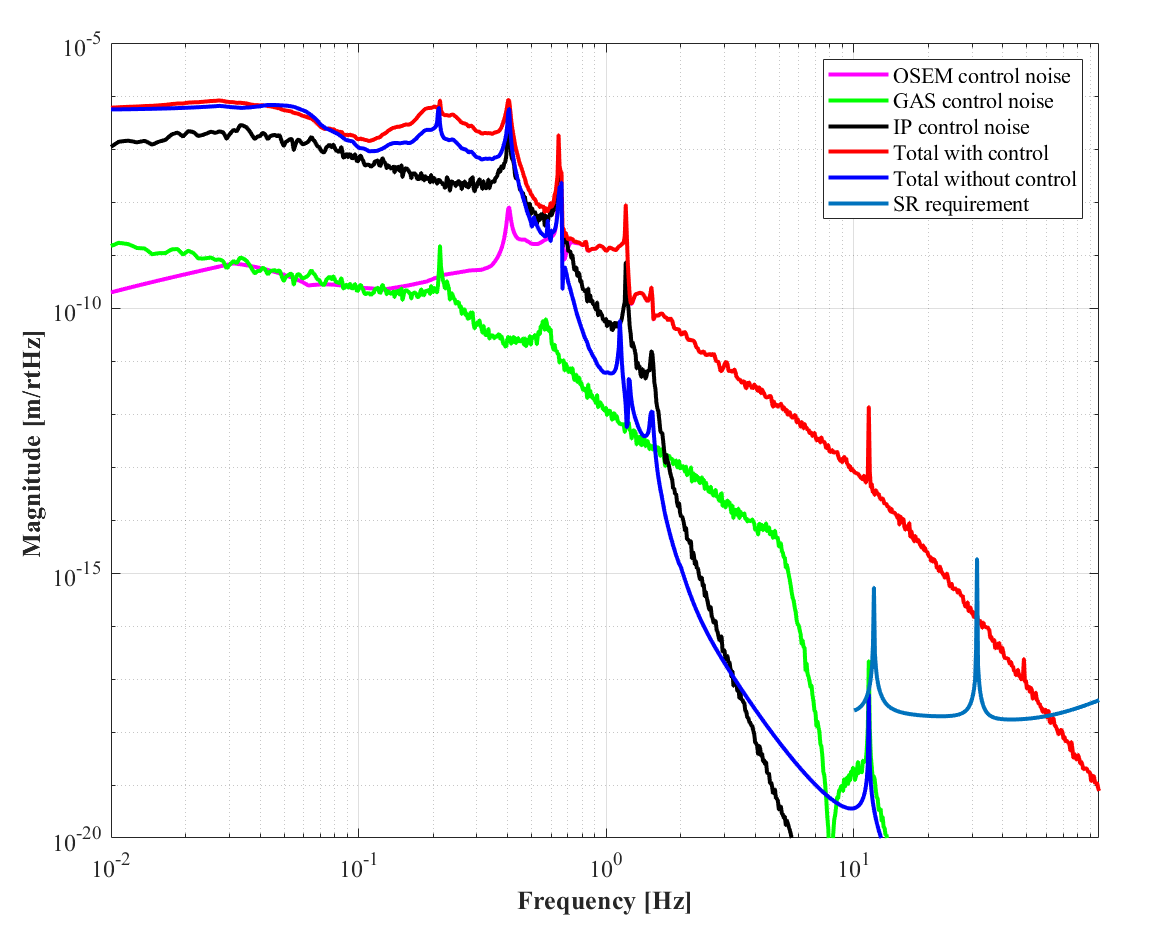
The picture attached shows the sensor noise fedback by the control system.
- The current control system does not fulfill the requirement above 10 Hz, which is where the interferometer observation band begins.
- From the results of ther prototype test in Mitaka the OSEM noise contibution was expected to be high. As far as I understand, the strategy would be to turn off the local OSEM and oplev control and switch to the WFS (waveform sensing) of the interferometer for feedback.
- The GAS filter LVDT contributuon is far too high. As far as I understand we aim to have those control loops closed during observation mode.
- The amount of coupling from the optic vertical to optic longitudinal is 1%.
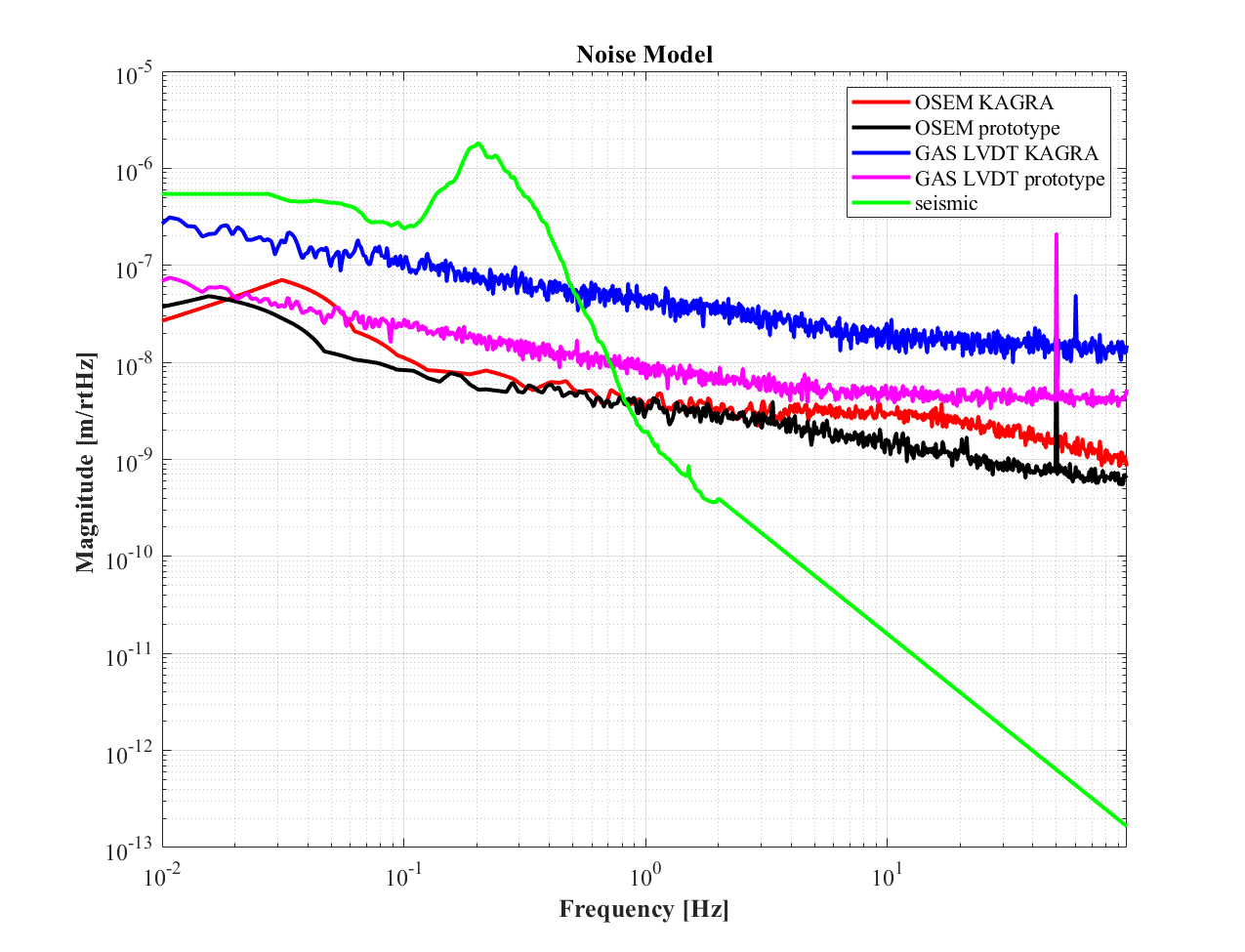
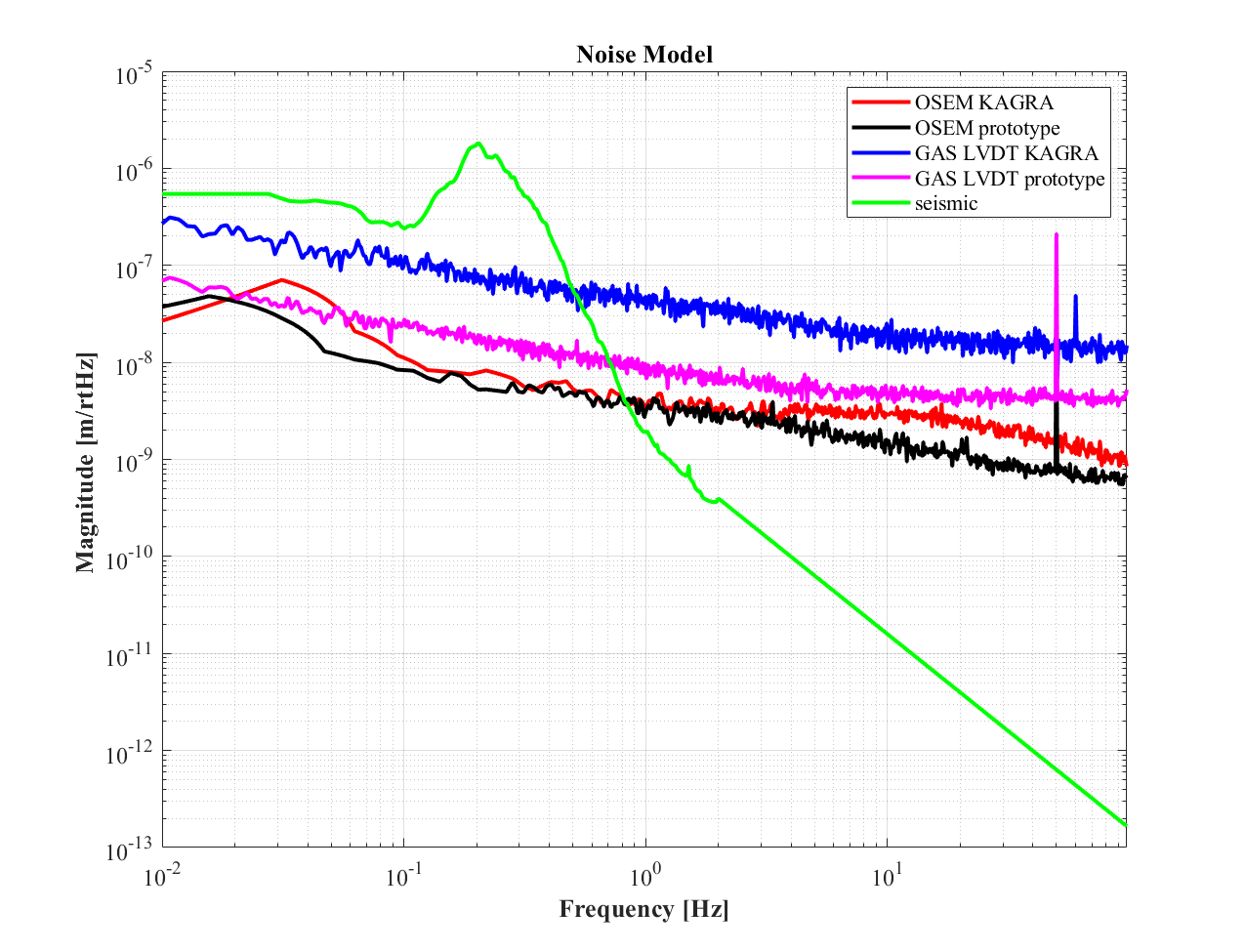
- In the simulation I used the filters which are currently used in the suspension.
- I used the measured noise of the LVDTs and OSEMs.
- I didn't include oplev noise.
- I didn't include geophone noise. The effect of inertial damping is not included yet.
Comments about GAS control filters:
- In the prototype the control gain at high frequencies was supressed by using Butterworth filters with cut-off frequencies below 5 Hz, where the electromagnetic coupling from the actuator to the LVDT begins. See pages 100, 101 and 172 in Takanori's thesis.
- For instance, In the case of SRM F0 (entry 7500 and 7513 for BF) the coupling begins about 2.5 Hz with the keystone locked and about 5 Hz when unlocked.
Reference: entry 8866.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}