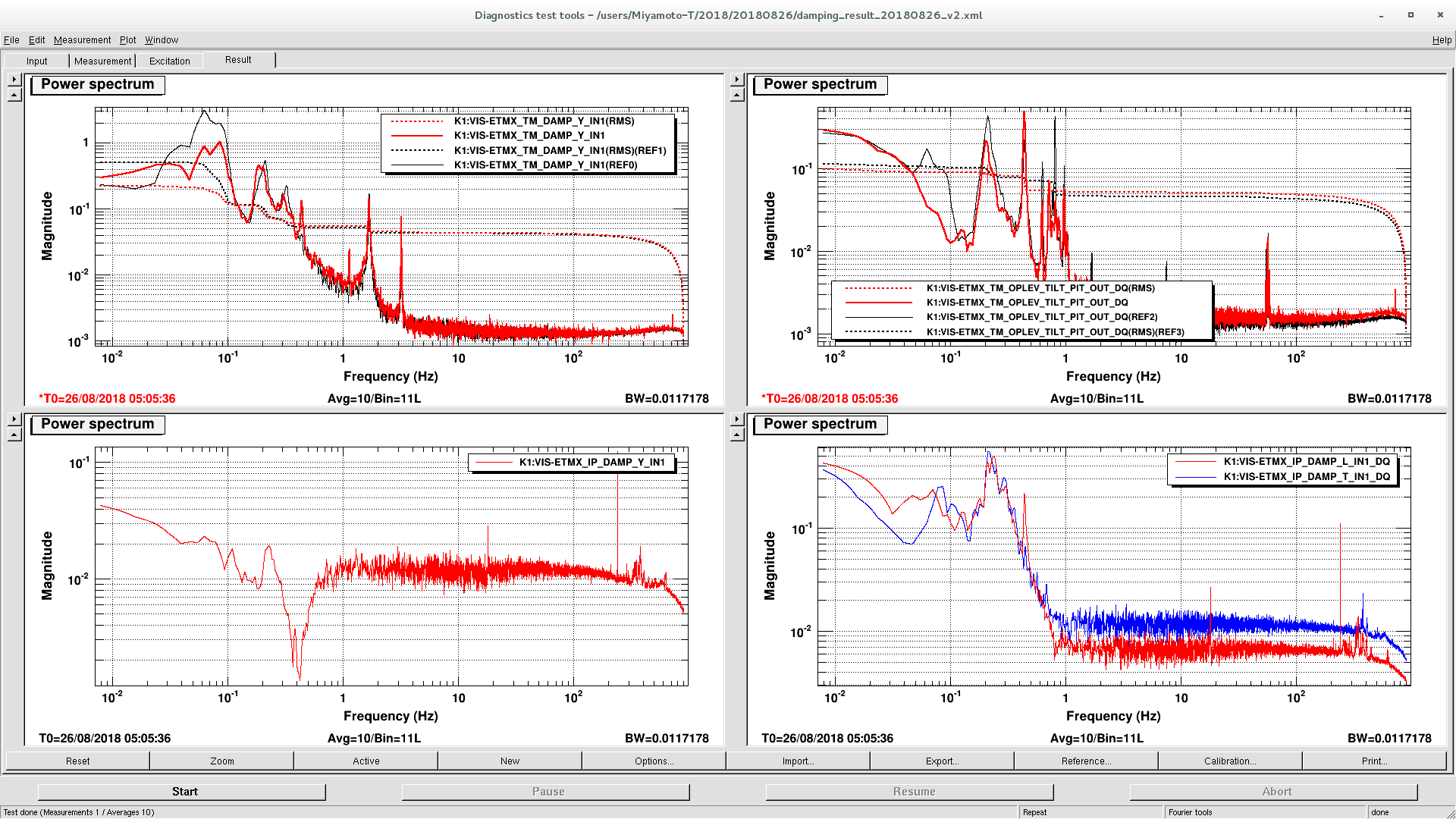
Yesterday, I added the TM oplev damping.
This result is Fig.1. ( Pit : ~100nrad [RMS] , Yaw : ~200nrad[RMS] )
TM-Oplev signal are uppper side graphs. Left one is Yaw motion, and right one is Pit motion.
Black line is yestrday morning result (not including the TM dampign filter).
Then I confirmed that all feed back loop was working.
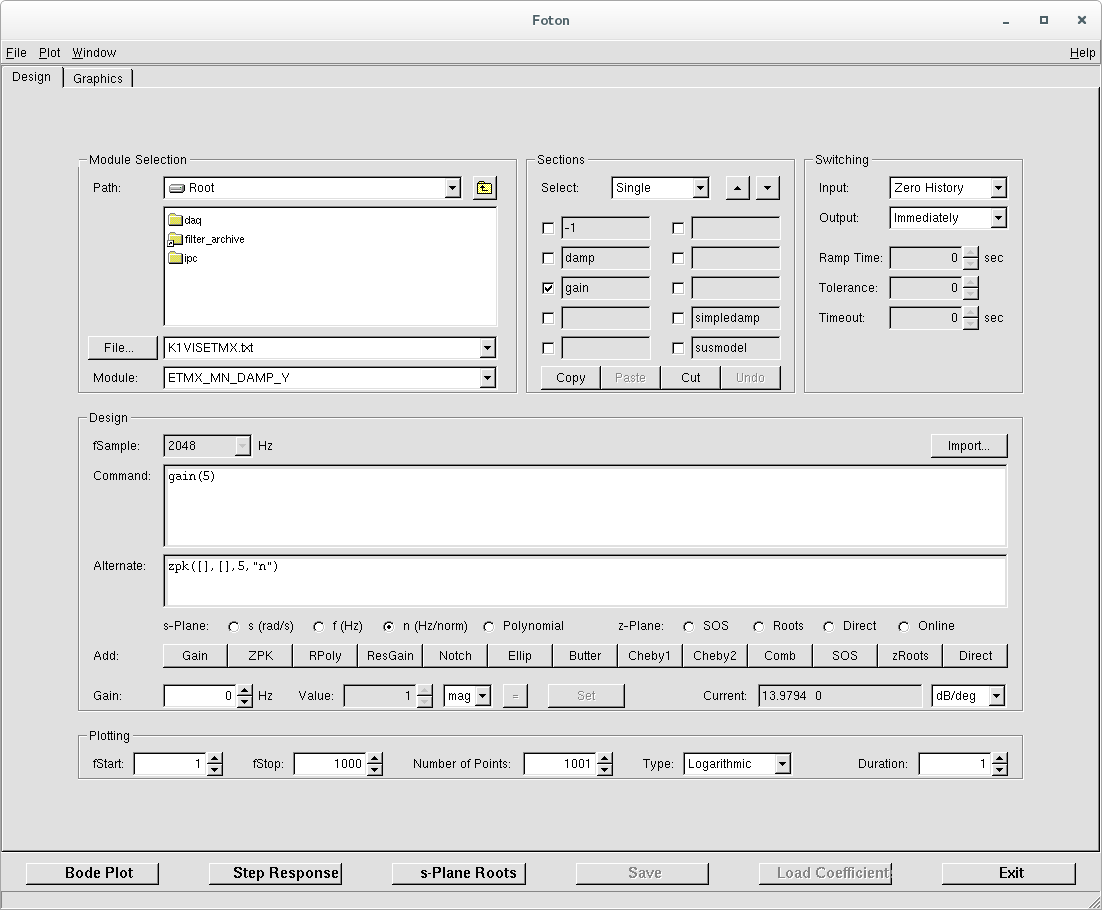
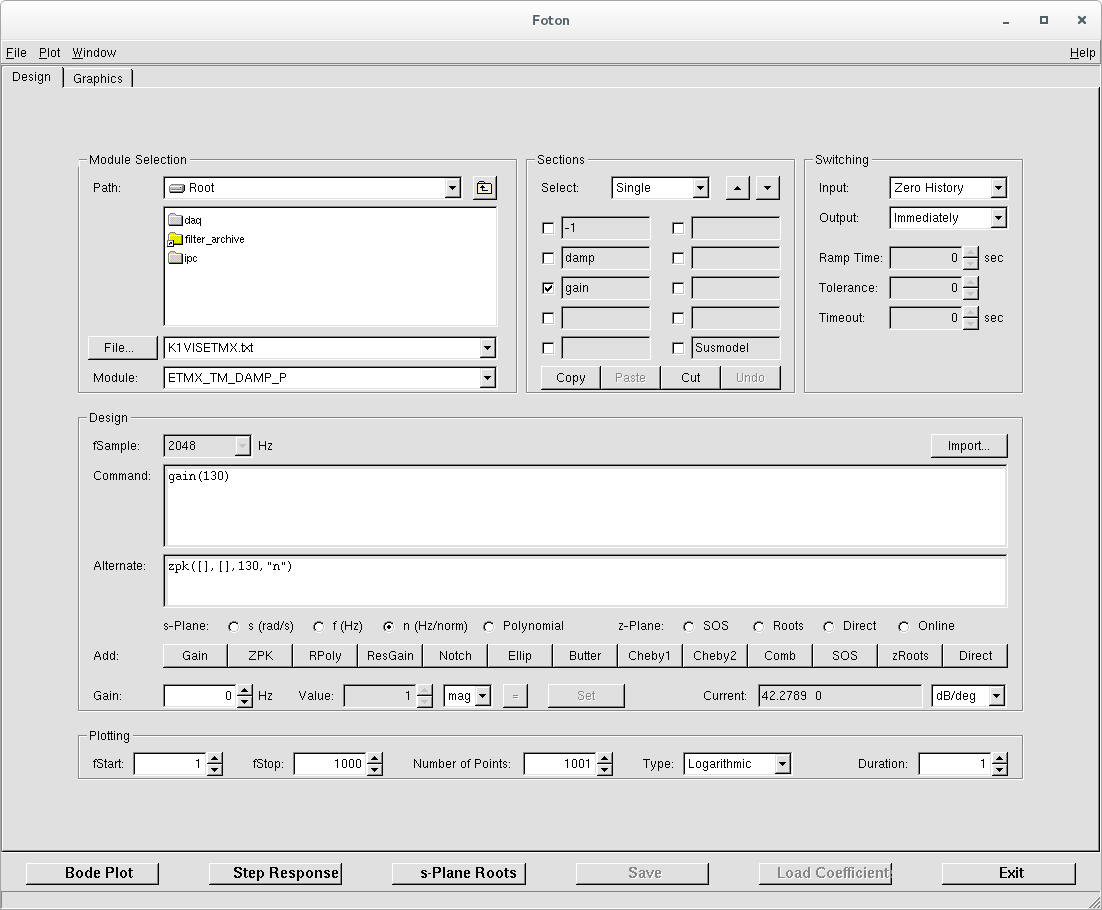
Therefore I fixed the gain value, and I included these gain to filter bank.
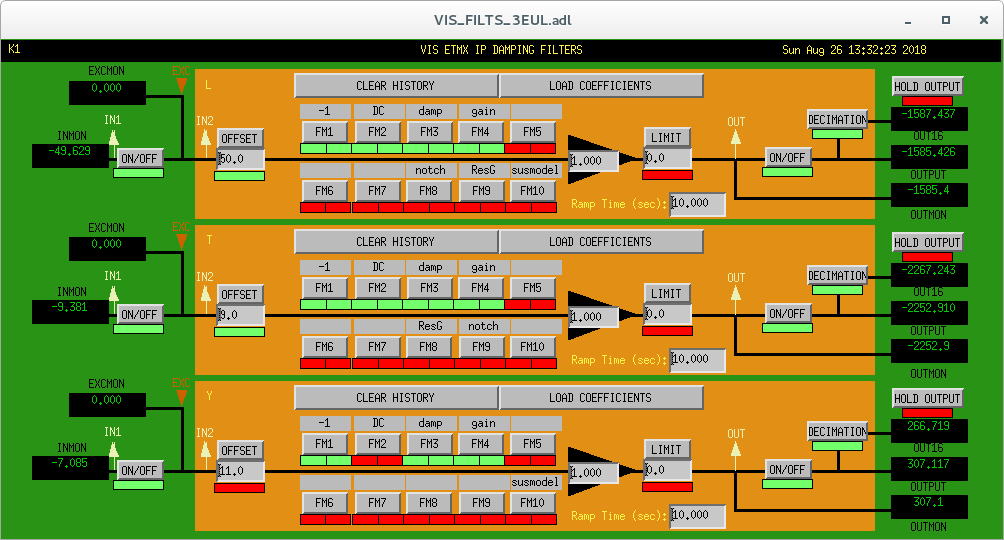
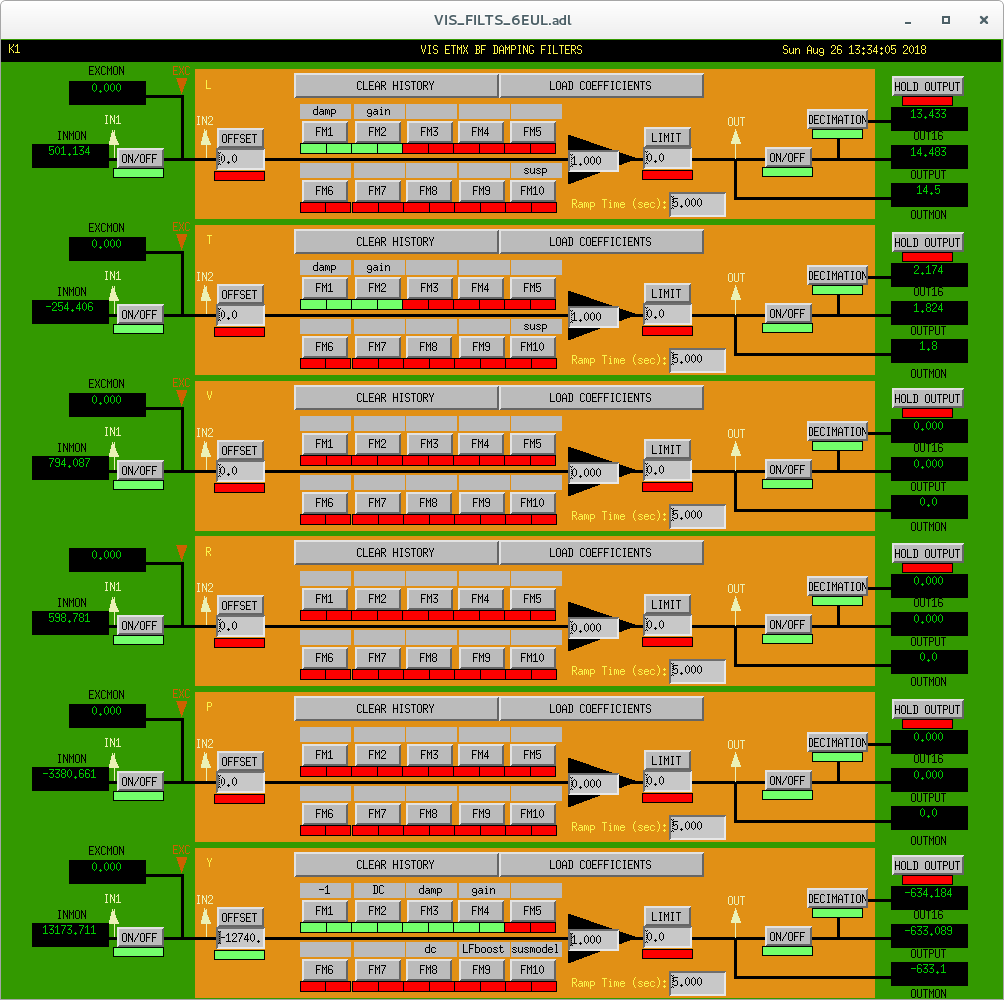
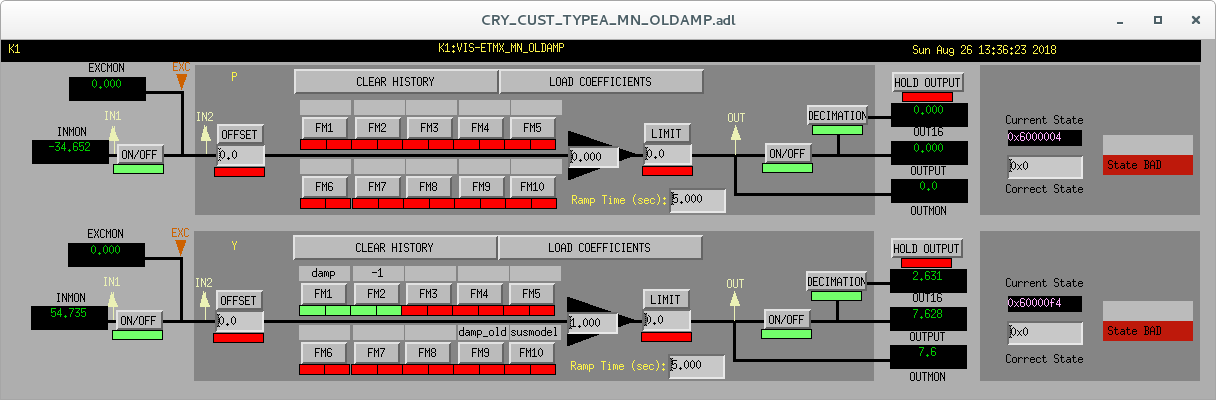
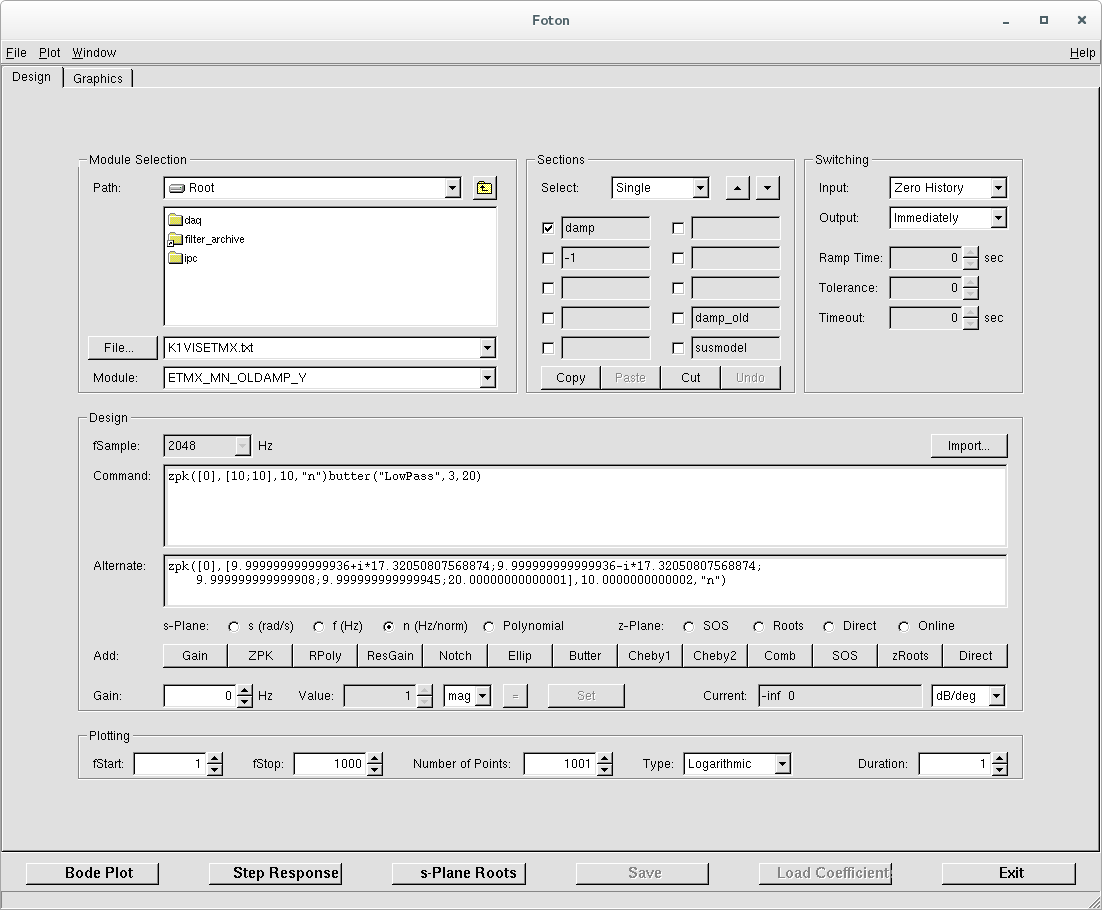
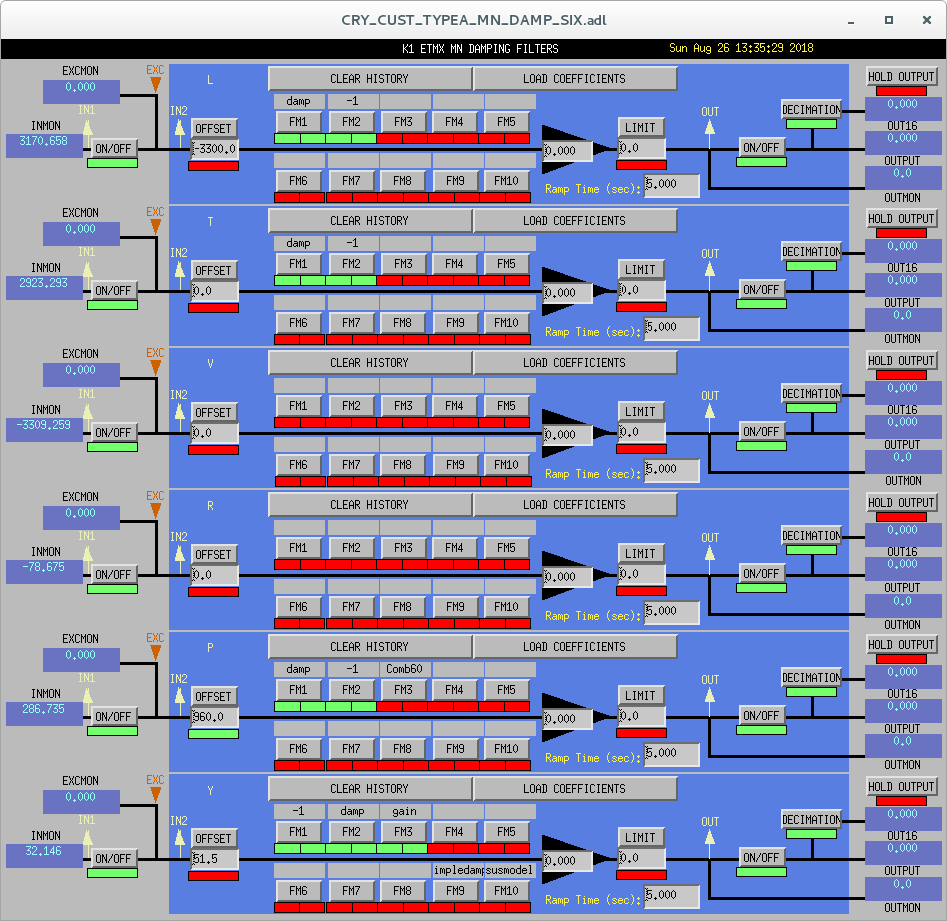
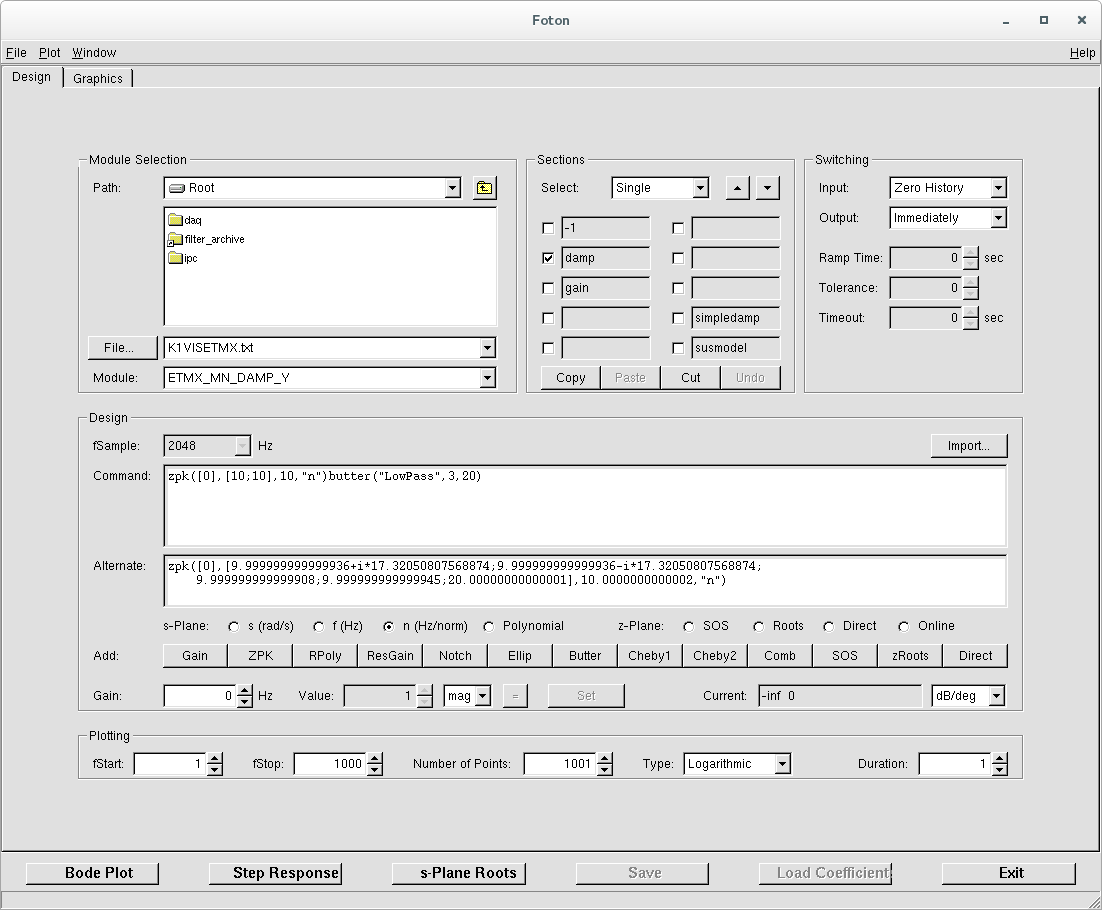
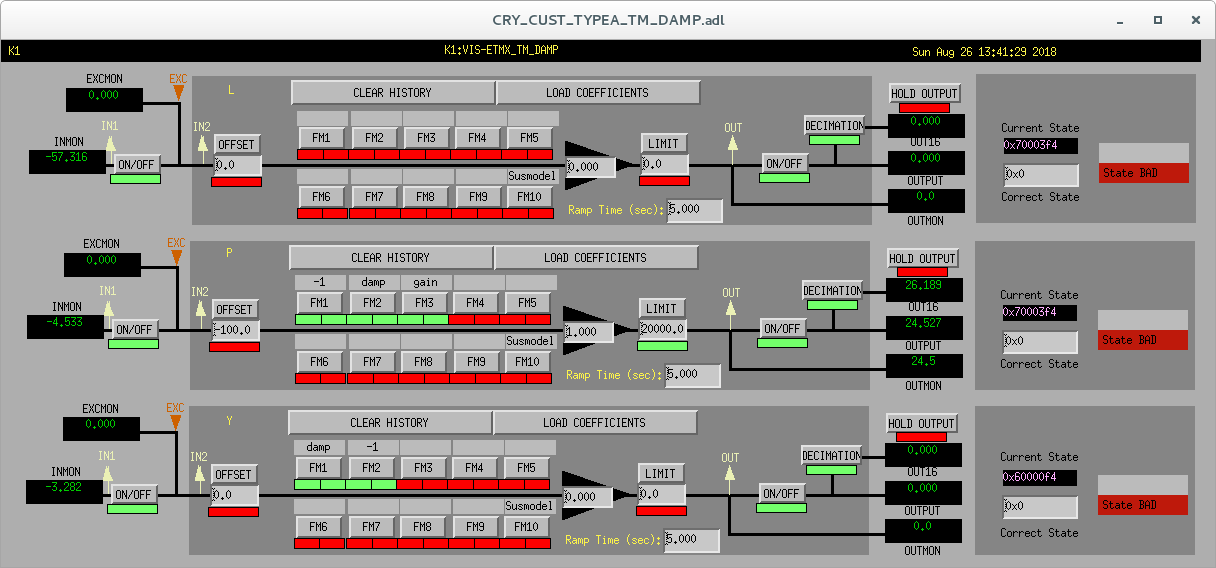
I uploaded the these filter bank condition.
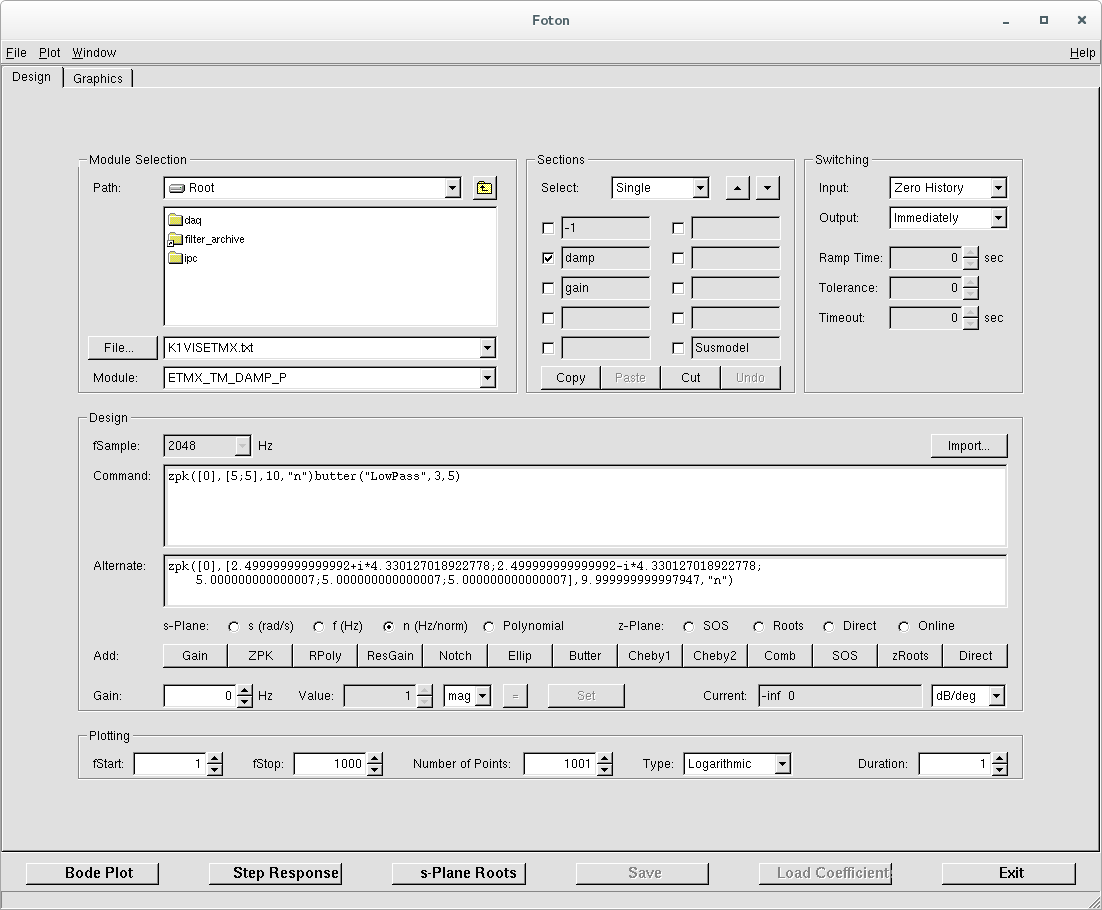
I don't change the damping filter about IP and BF, so I upload the damping filter of MN stage and TM satage.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}