[Fujii, Miyamoto]
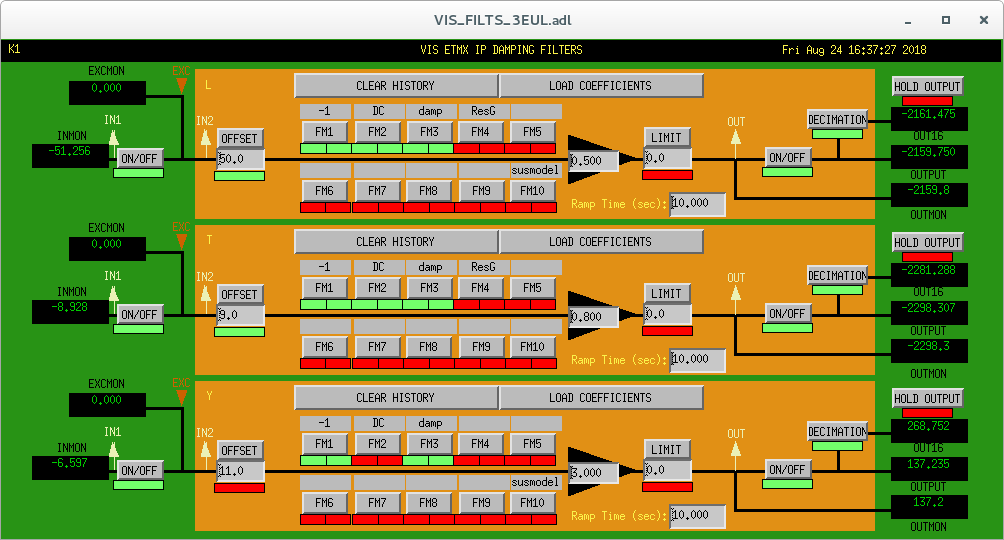
we succeeded the ETMX dumping of the TM pit and yaw motion.
We achieved the requirement by the commissioners ( < 880 nrad in RMS )
The best RMS today when all the control was closed were:
400 nrad in Yaw DoF (RMS)
600 nrad in Pitch DoF (RMS)
However this time we focused the damping of TM yaw motion.
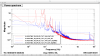
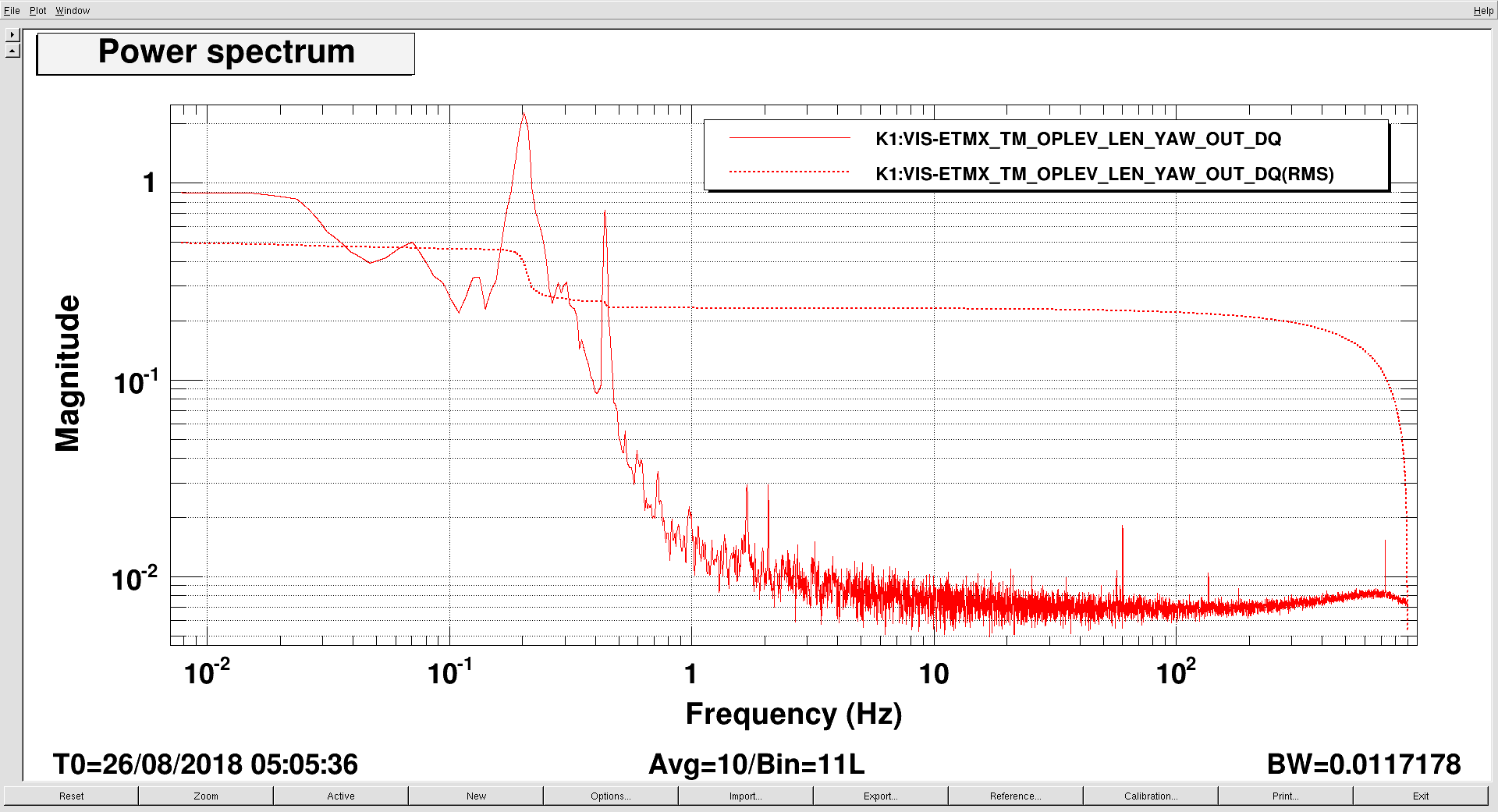
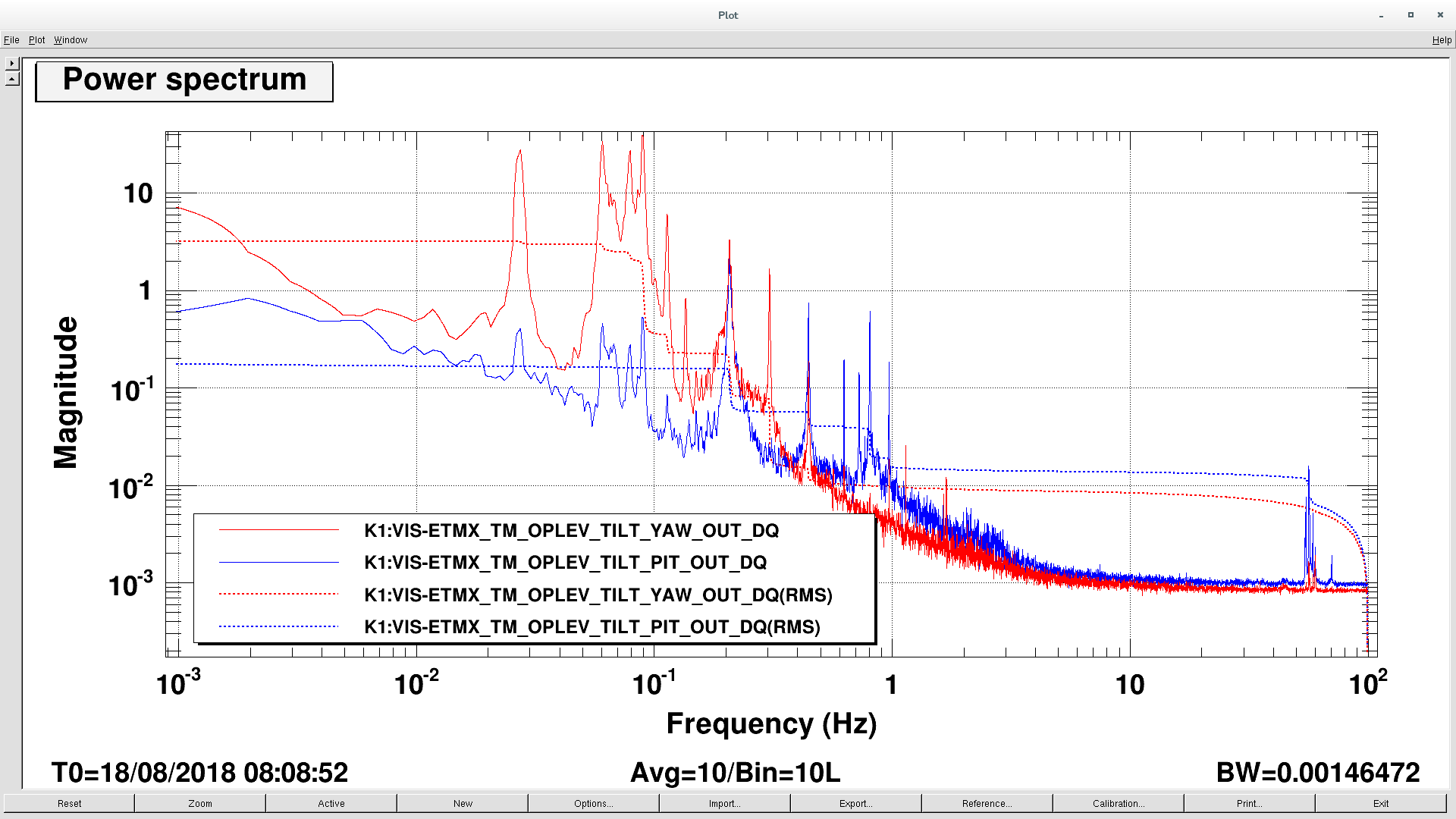
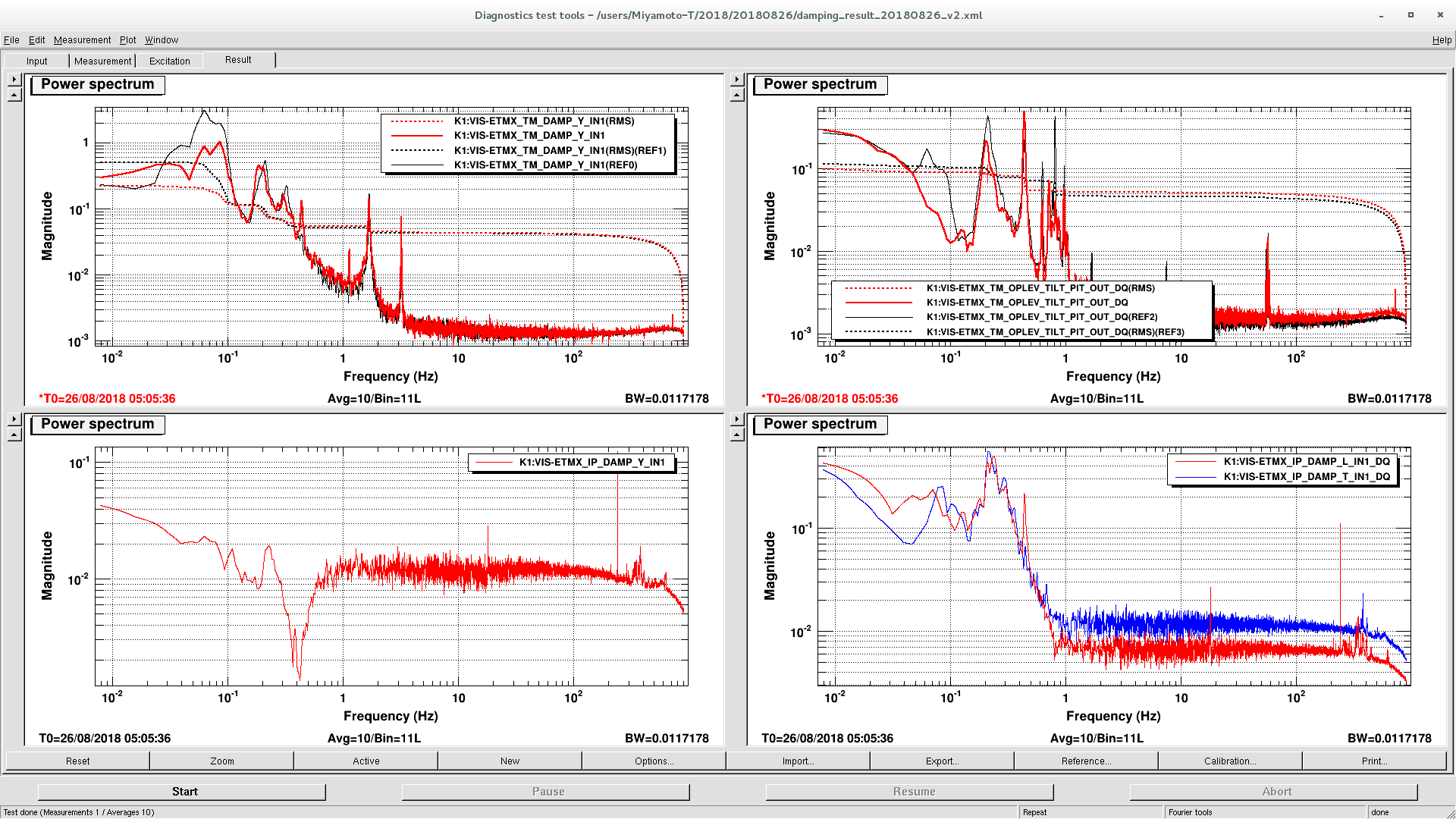
Before damping TM oplev Power spectrum : Fig.1
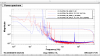
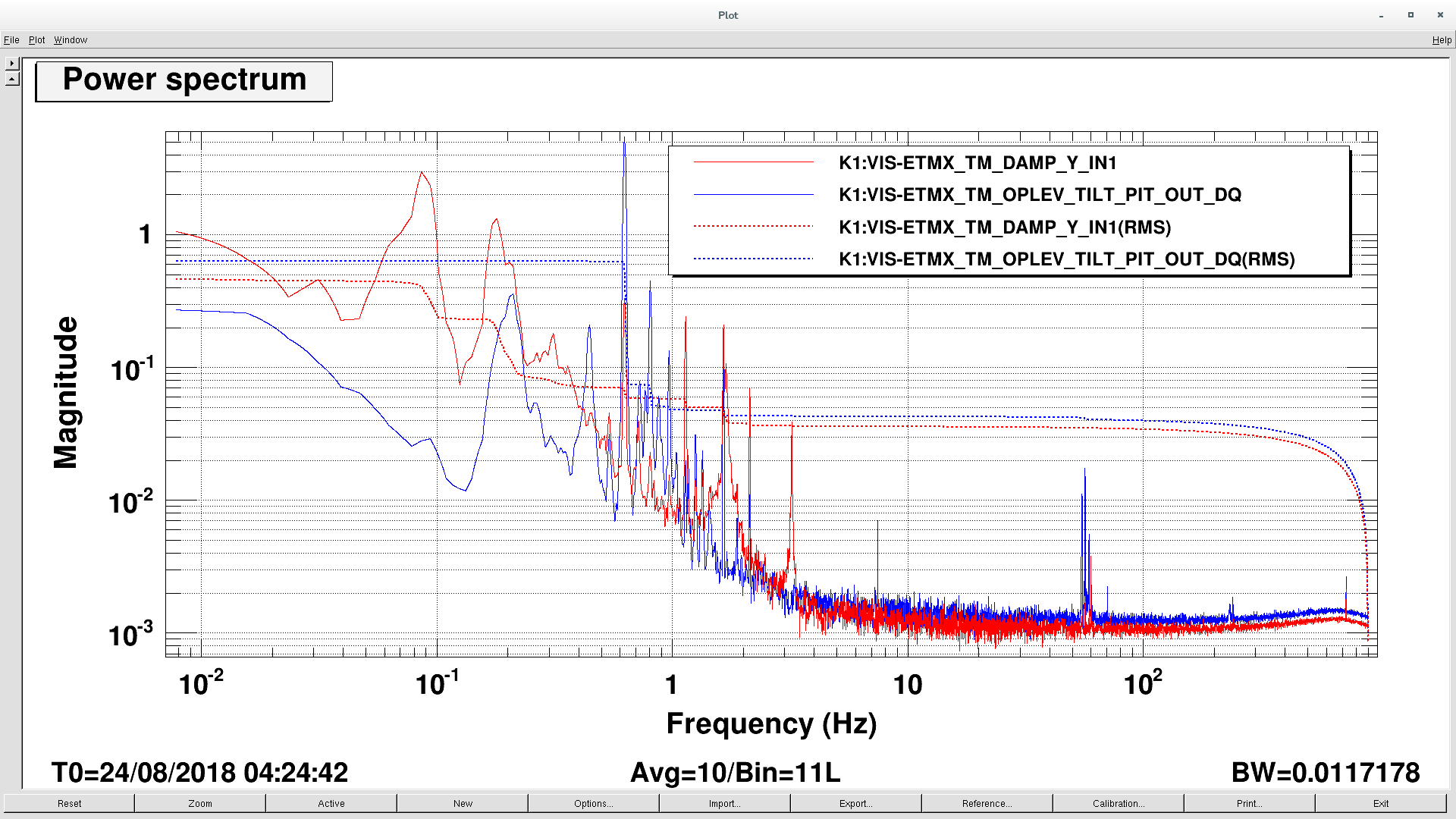
After damping TM oplev Power spectrum : Fig.2
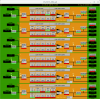
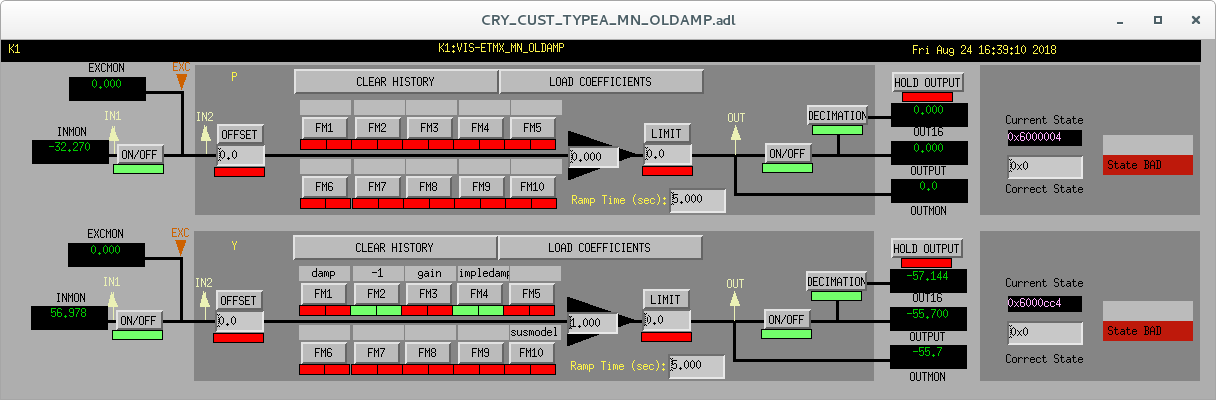
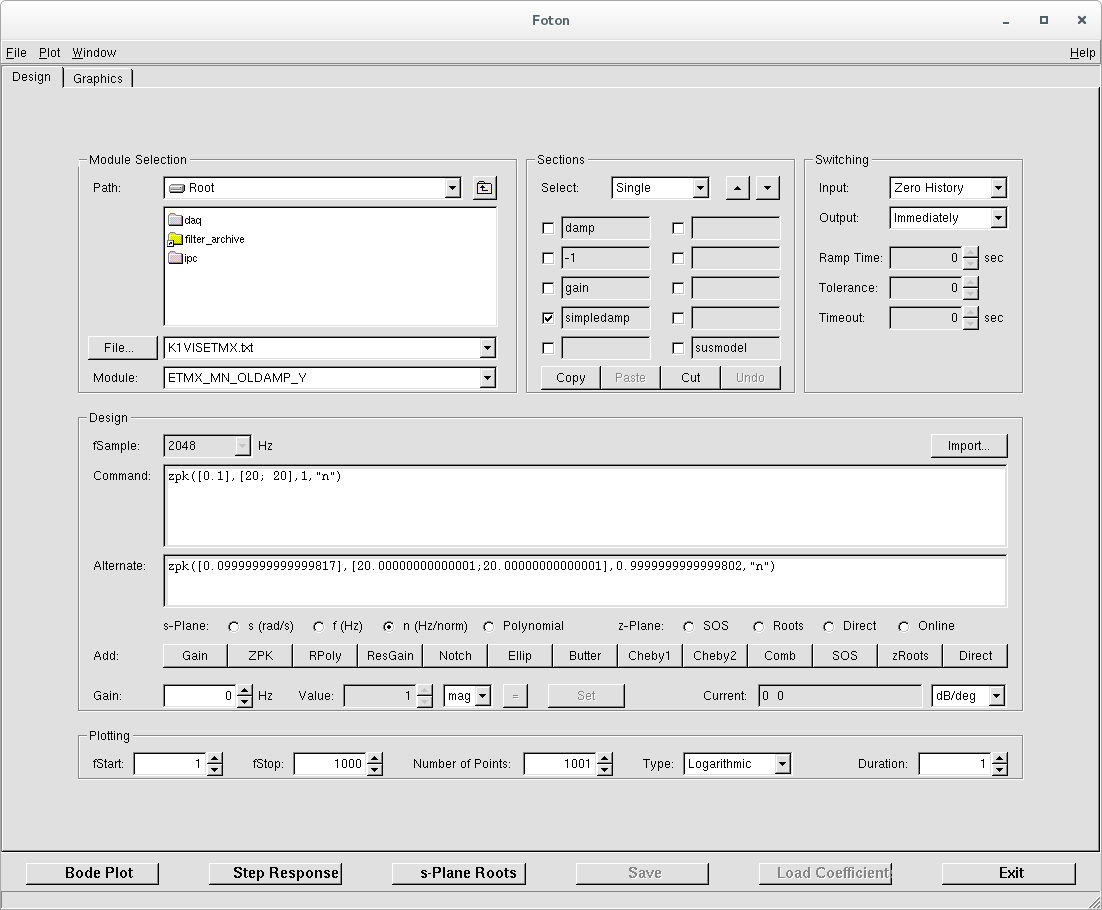
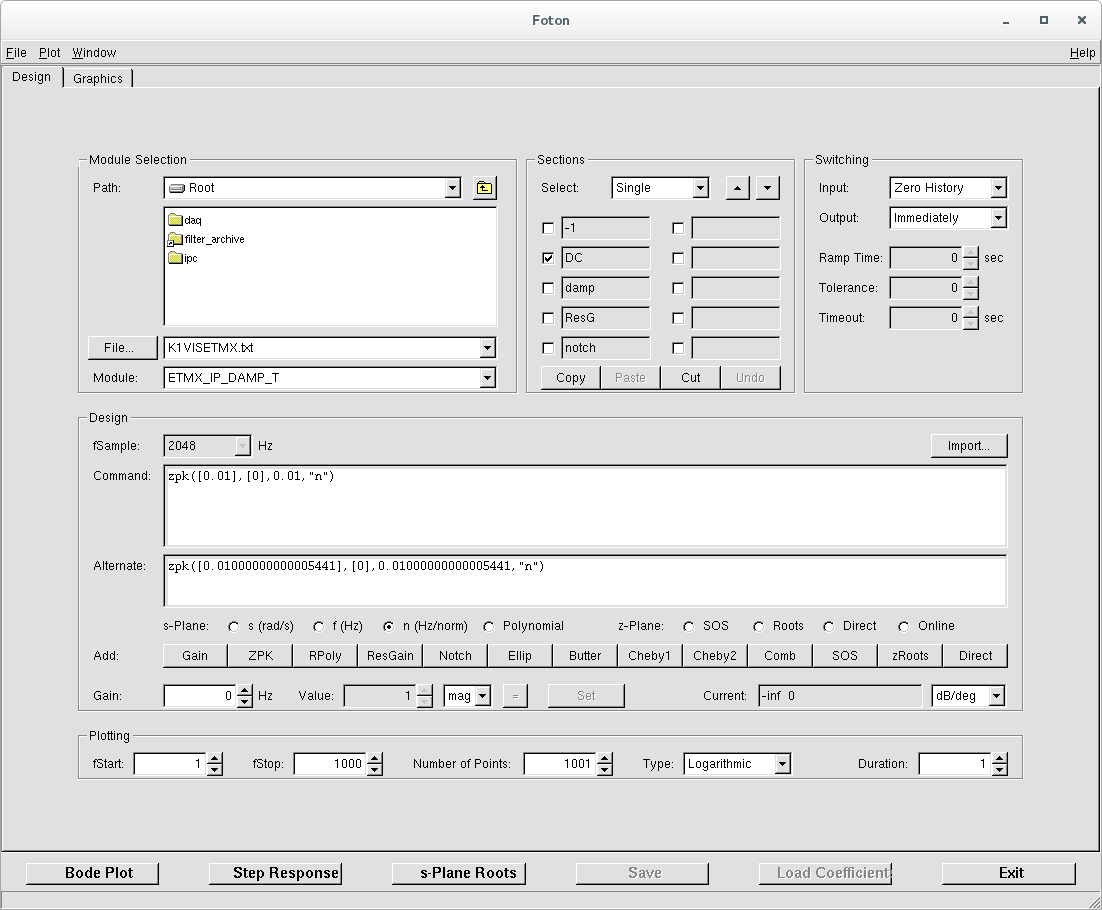
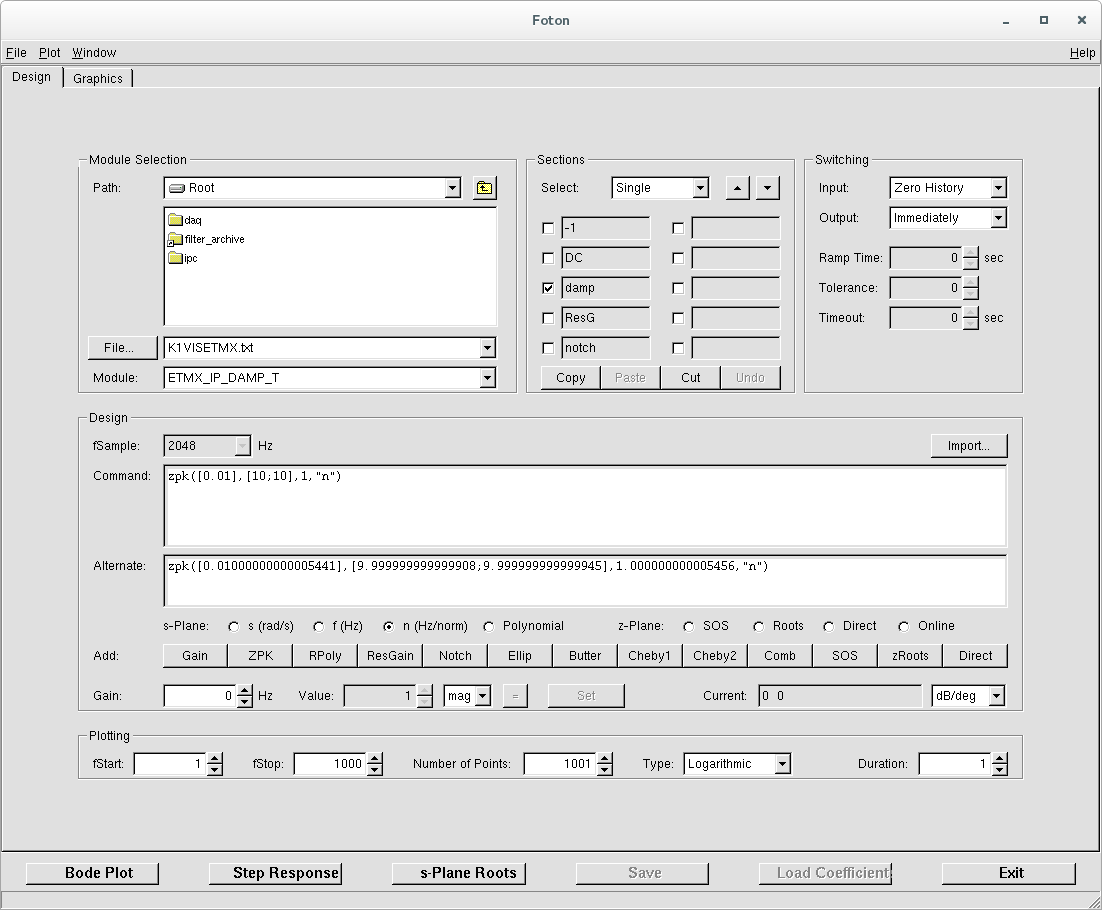
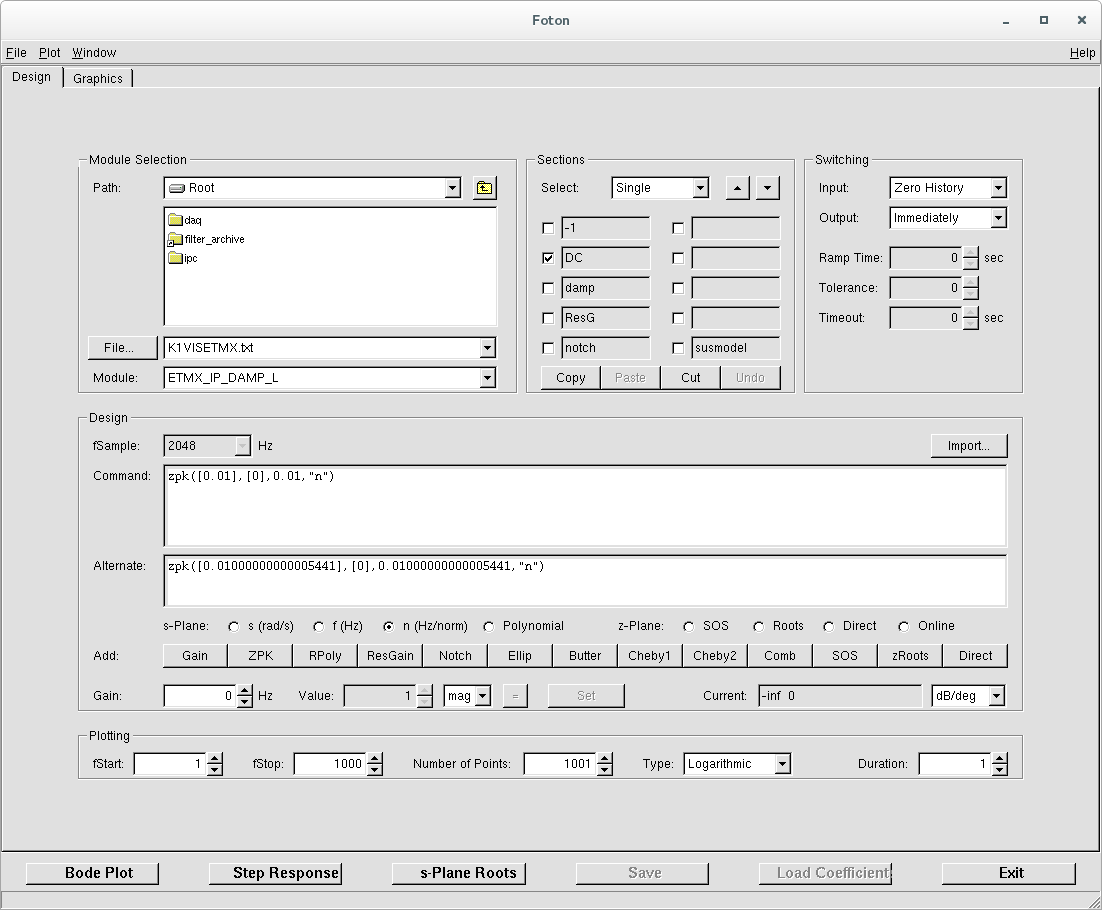
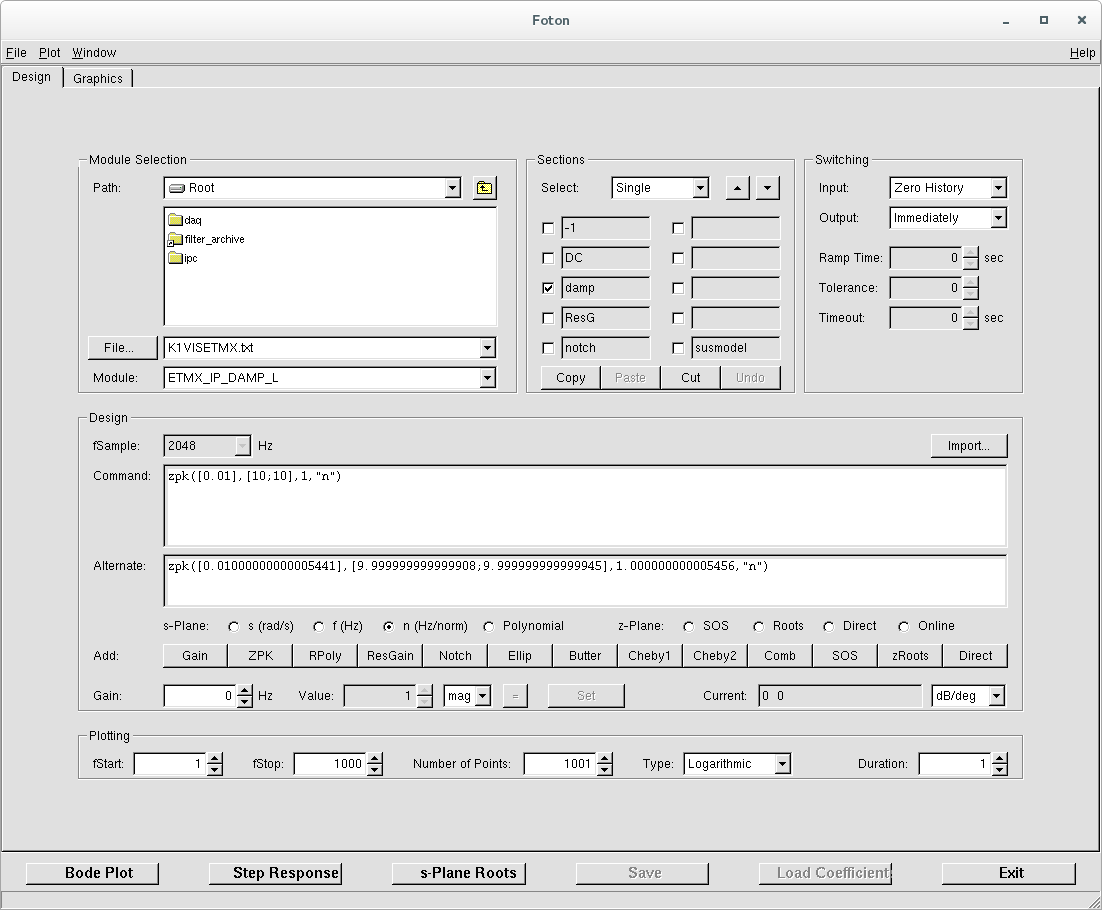
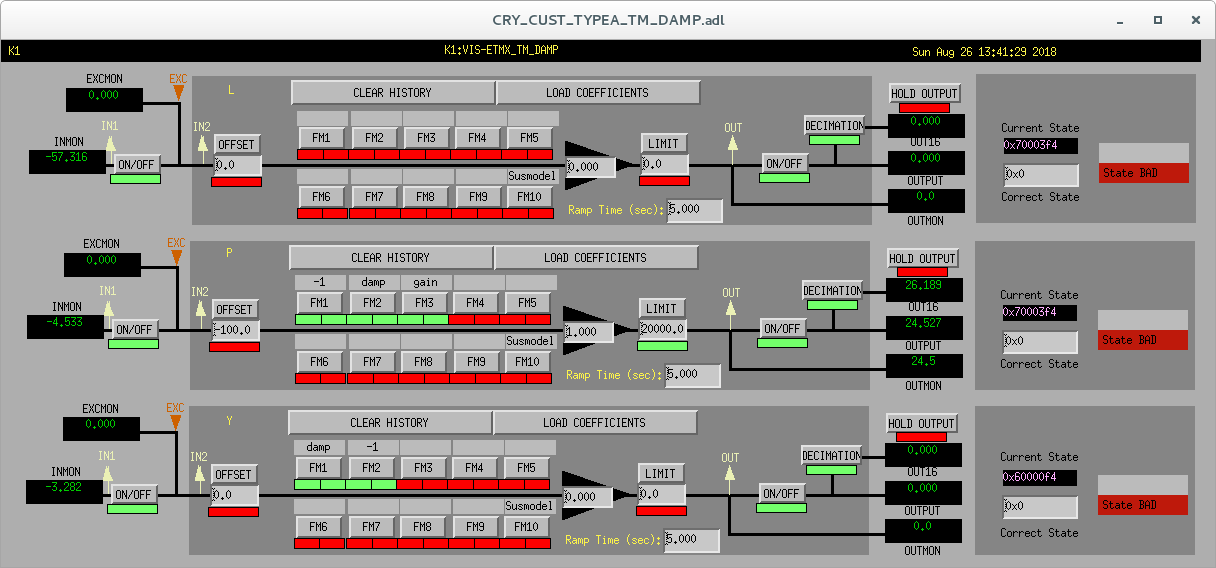
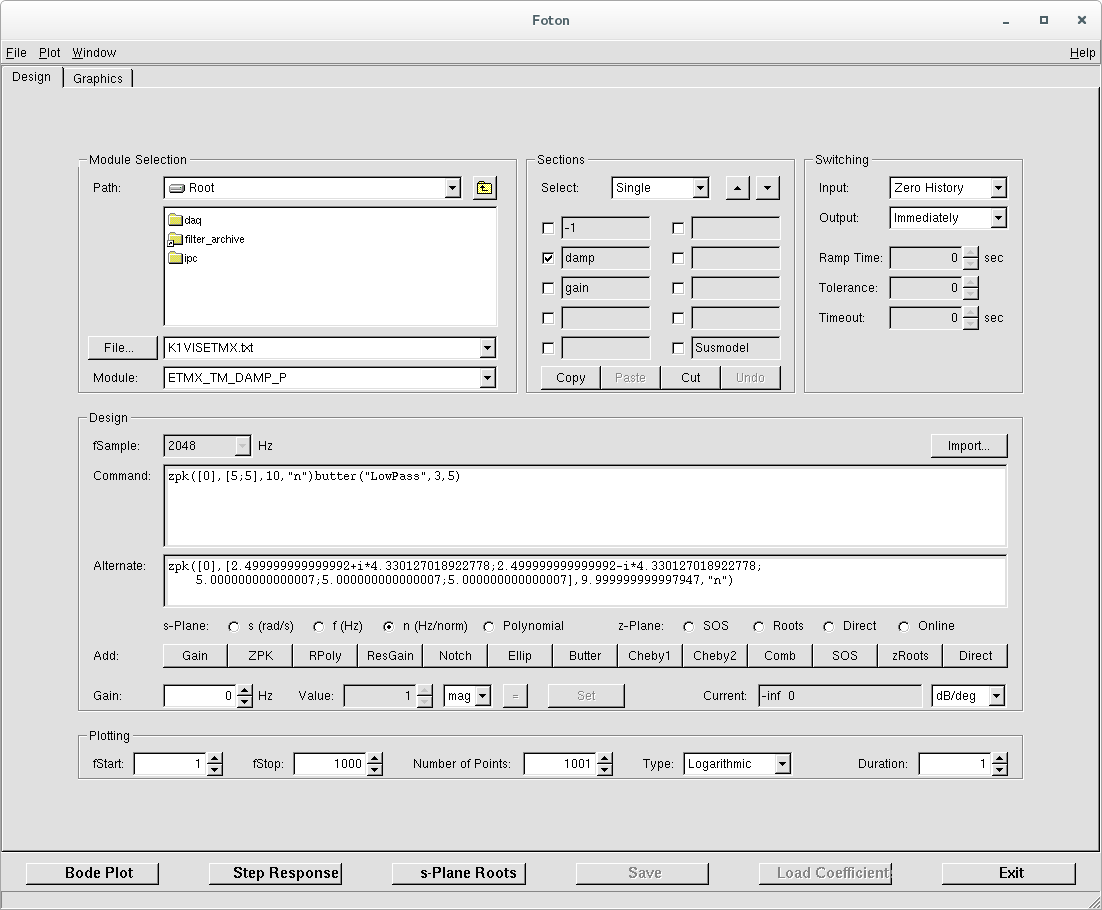
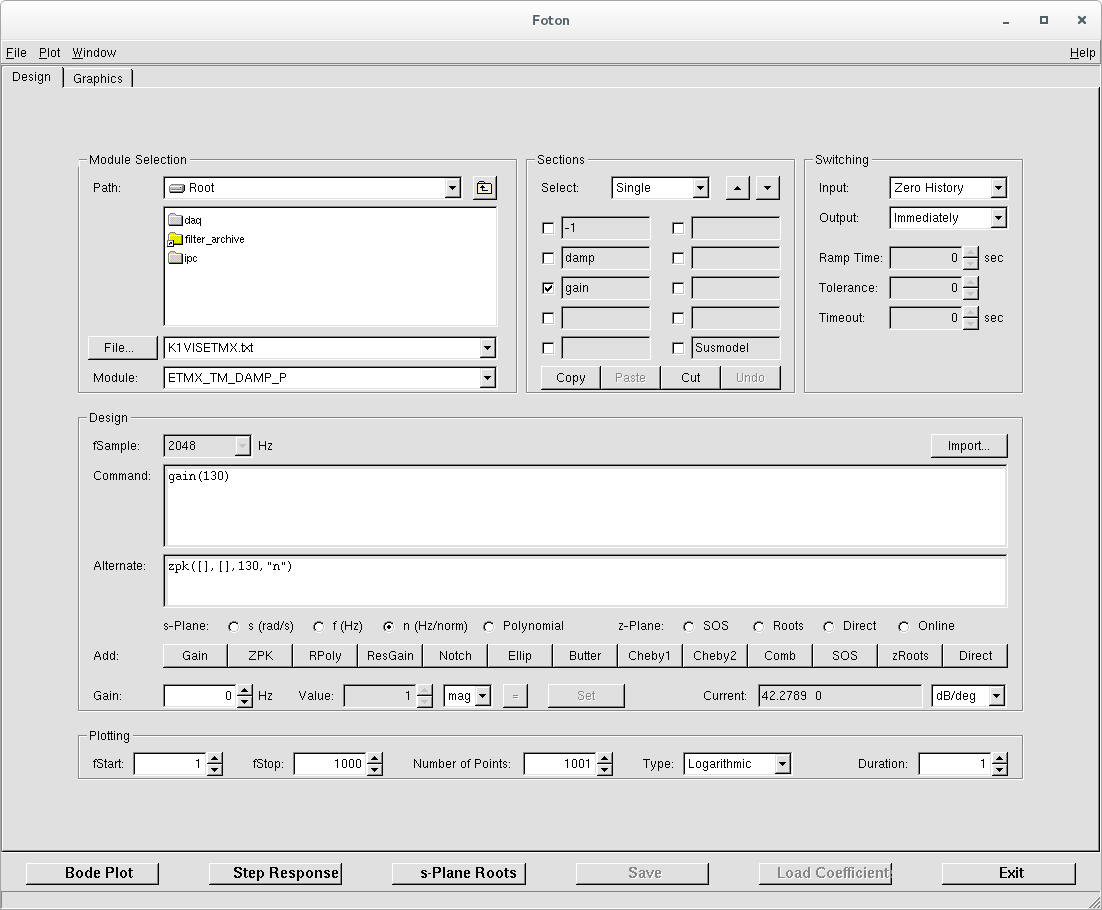
And we upload the damping filter information due to the log.
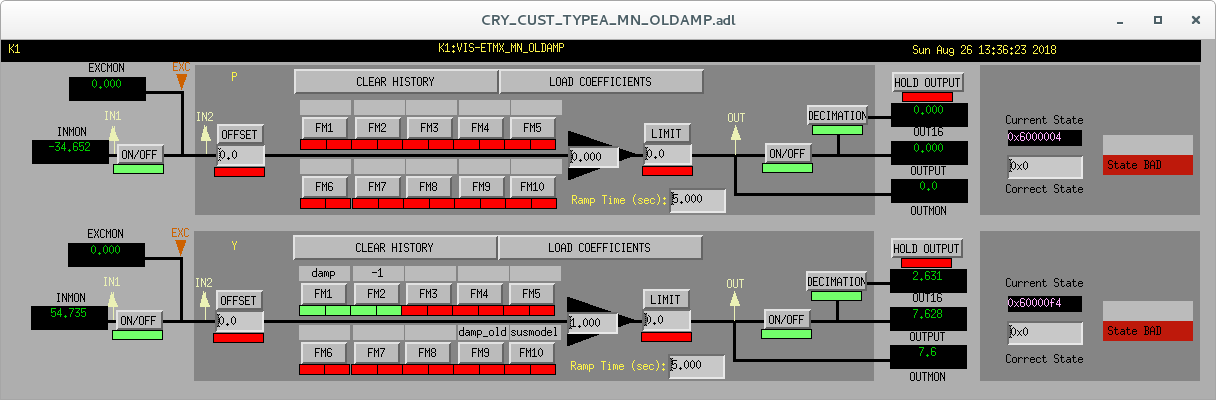
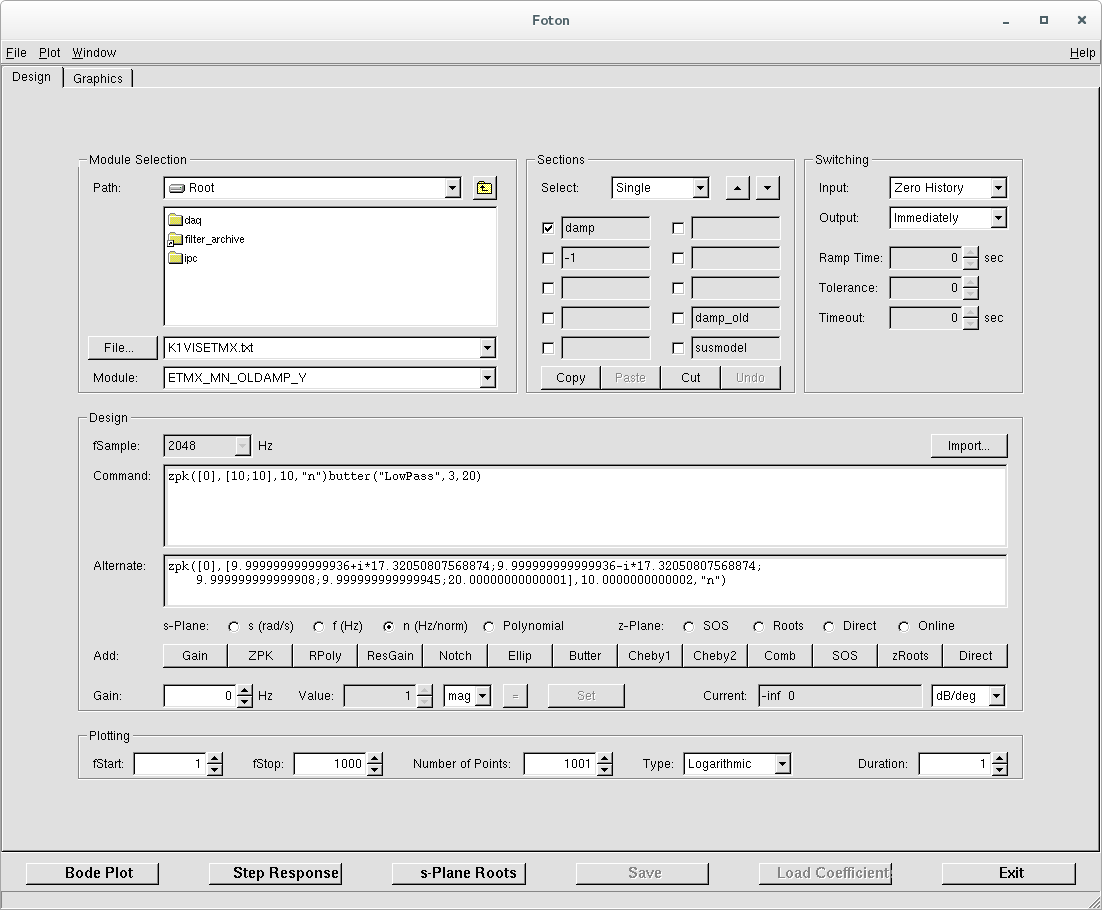
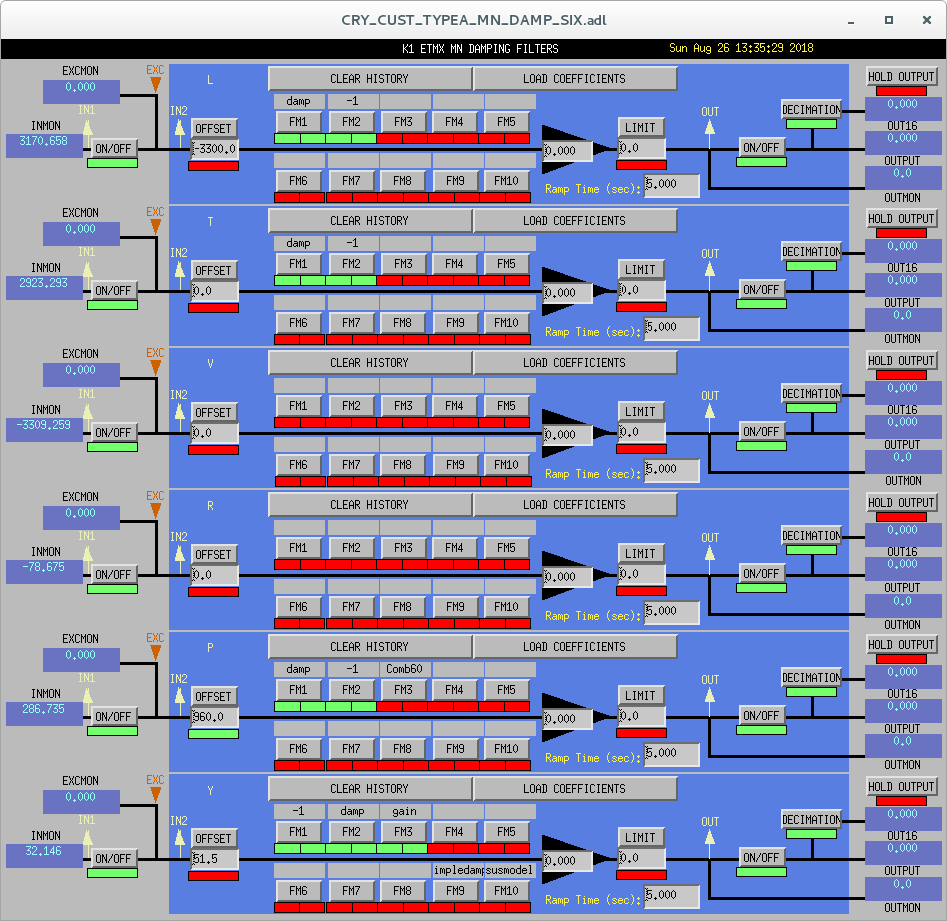
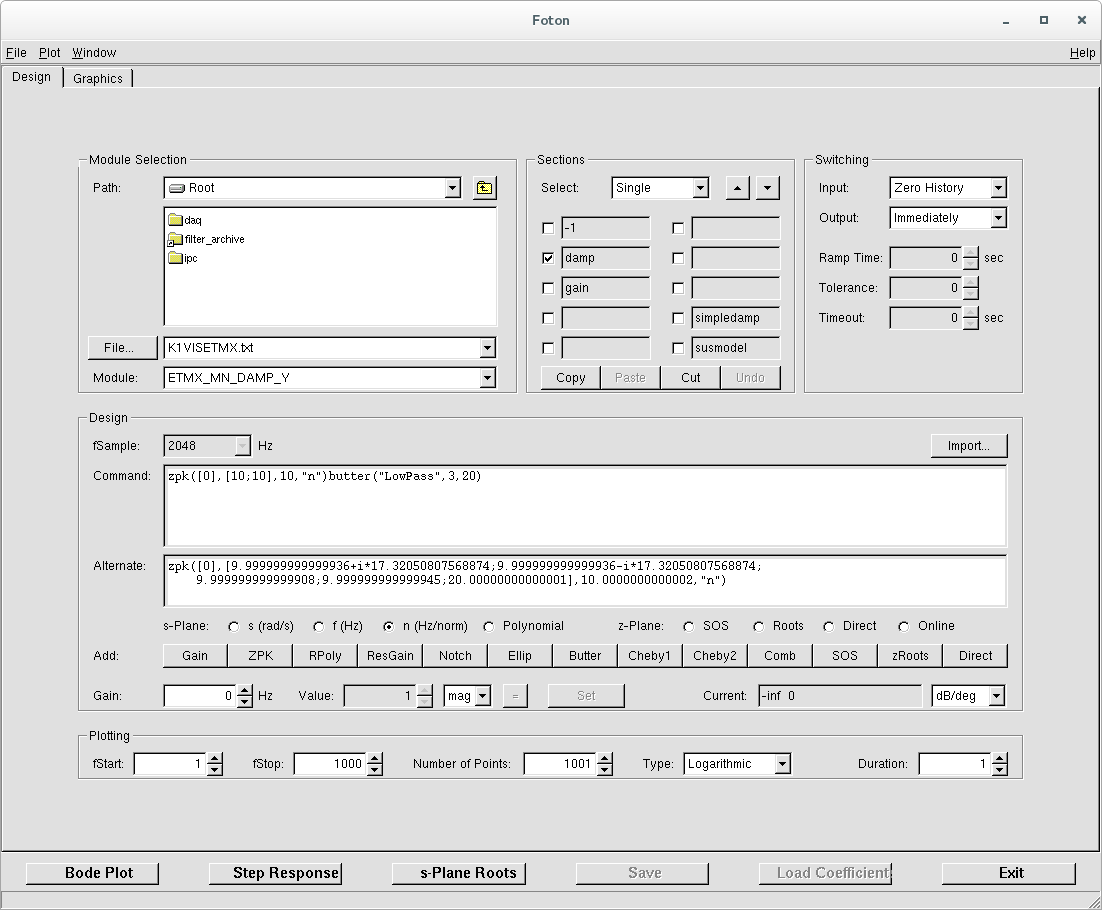
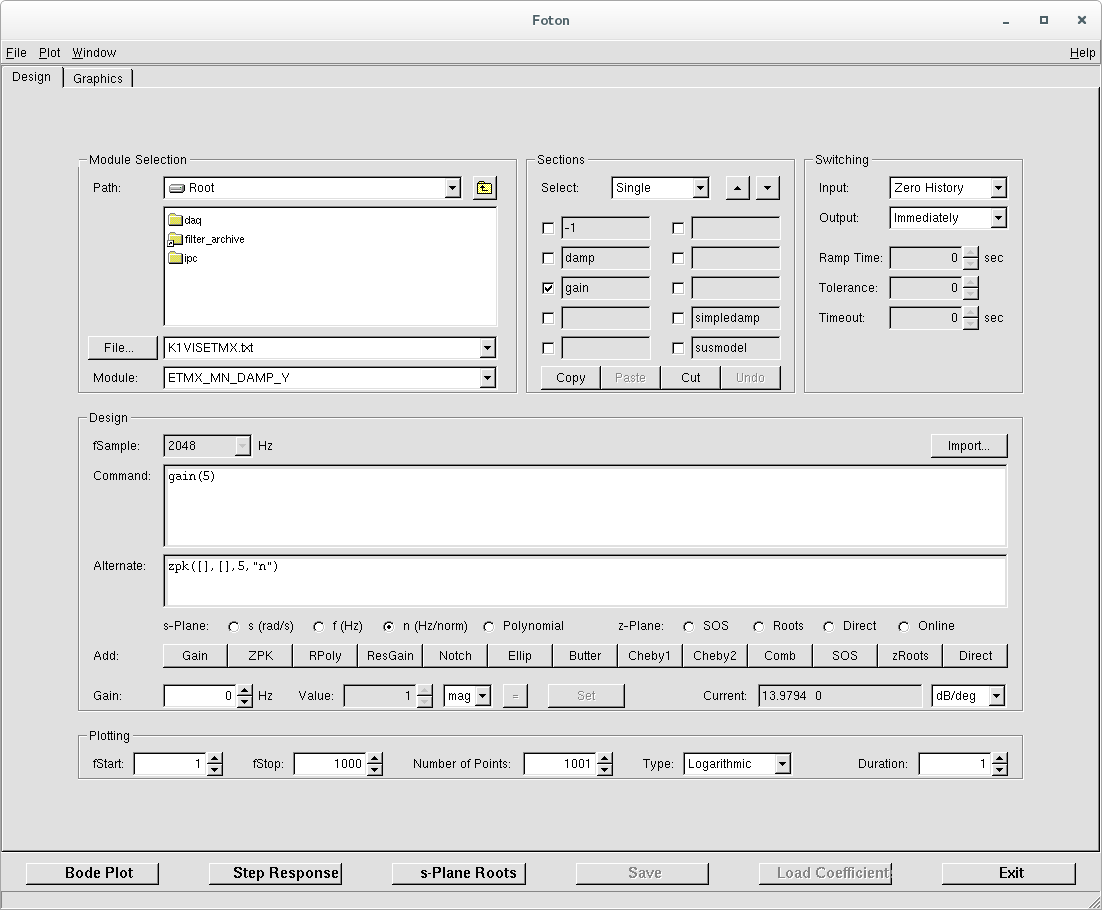
- MN stage Fig.3, Fig.4
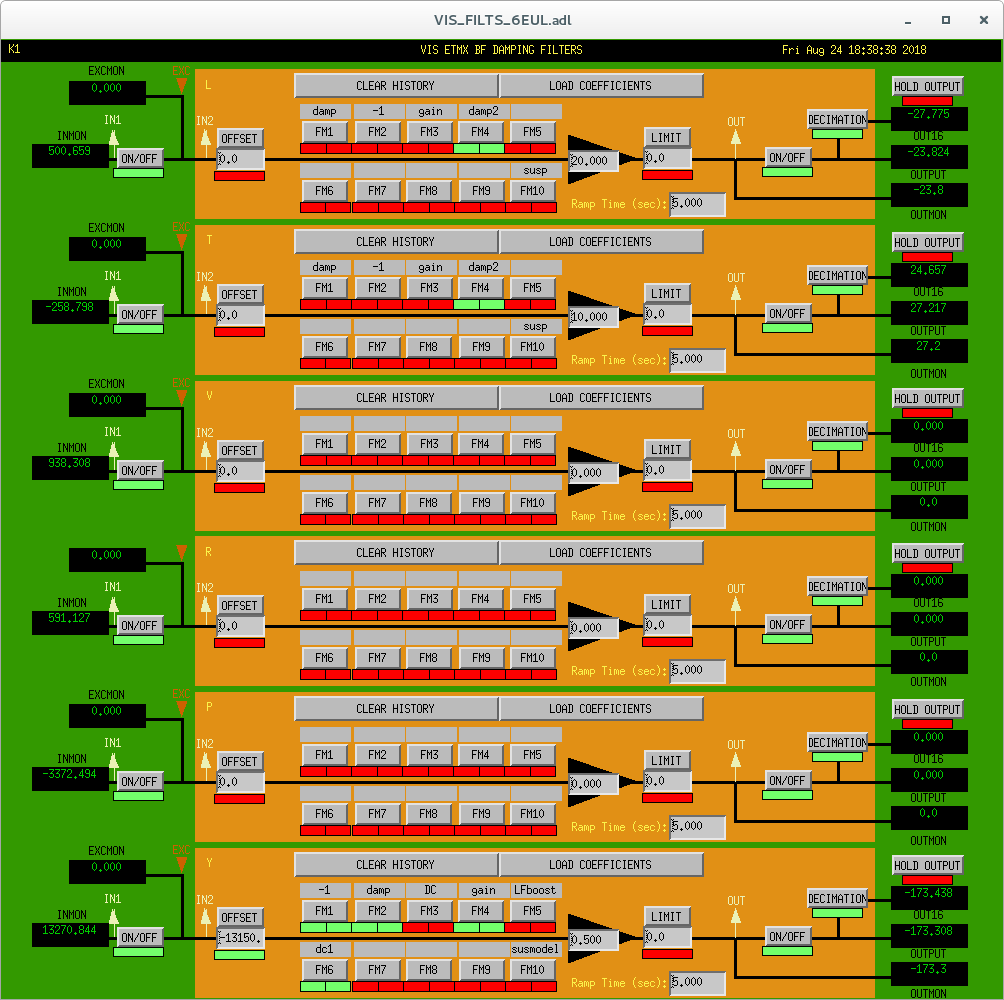
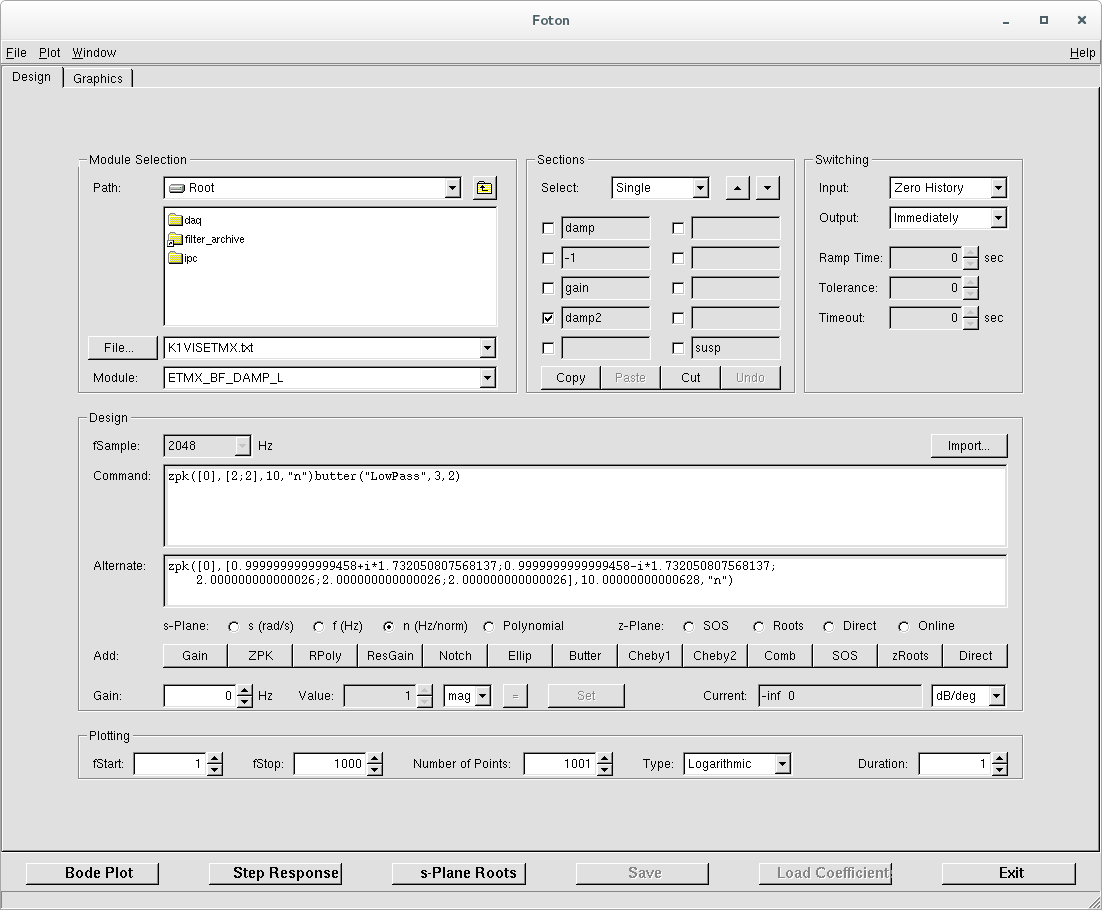
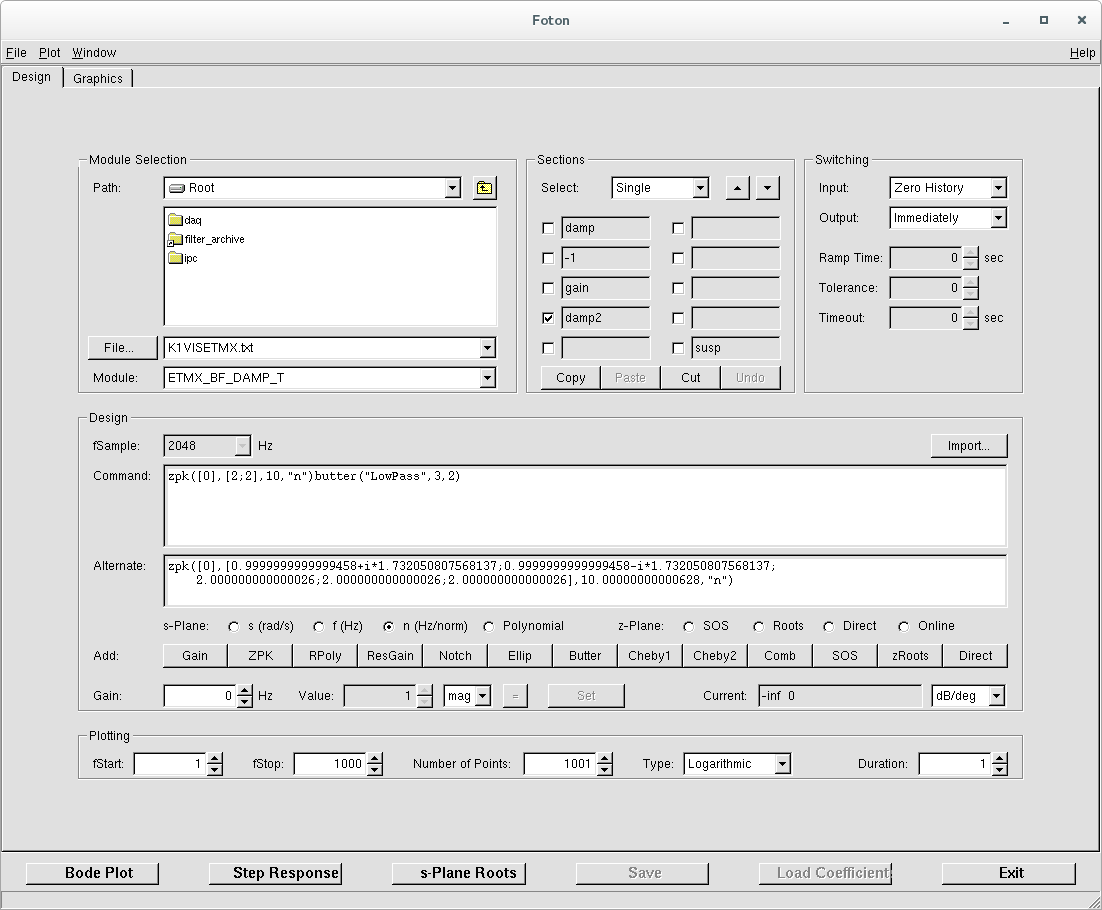
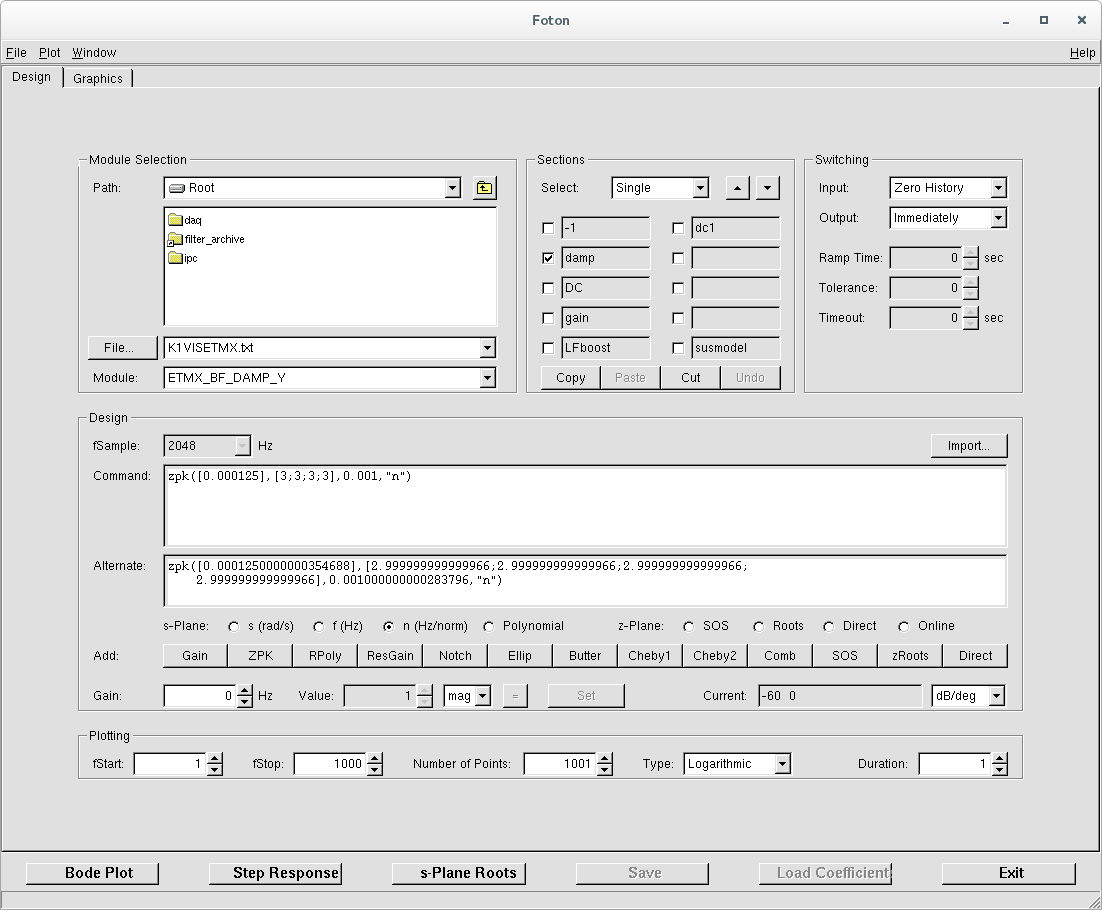
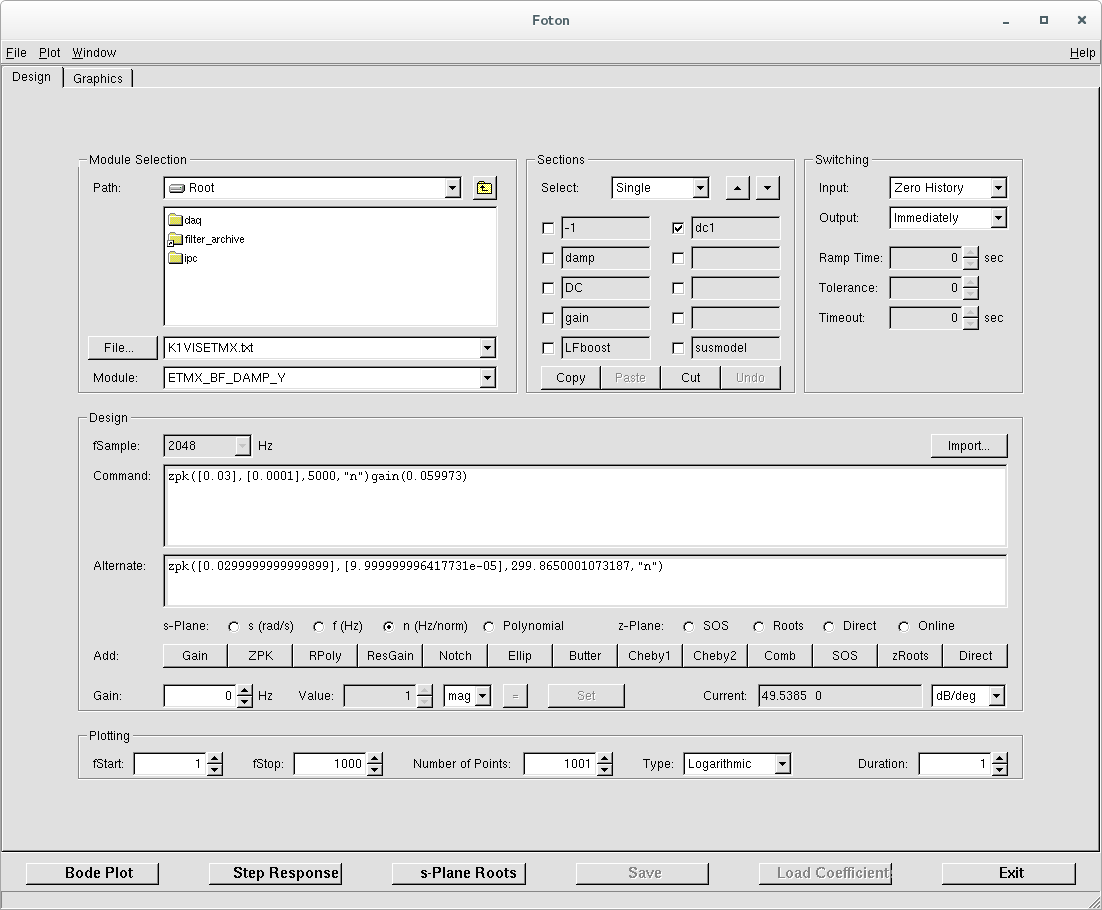
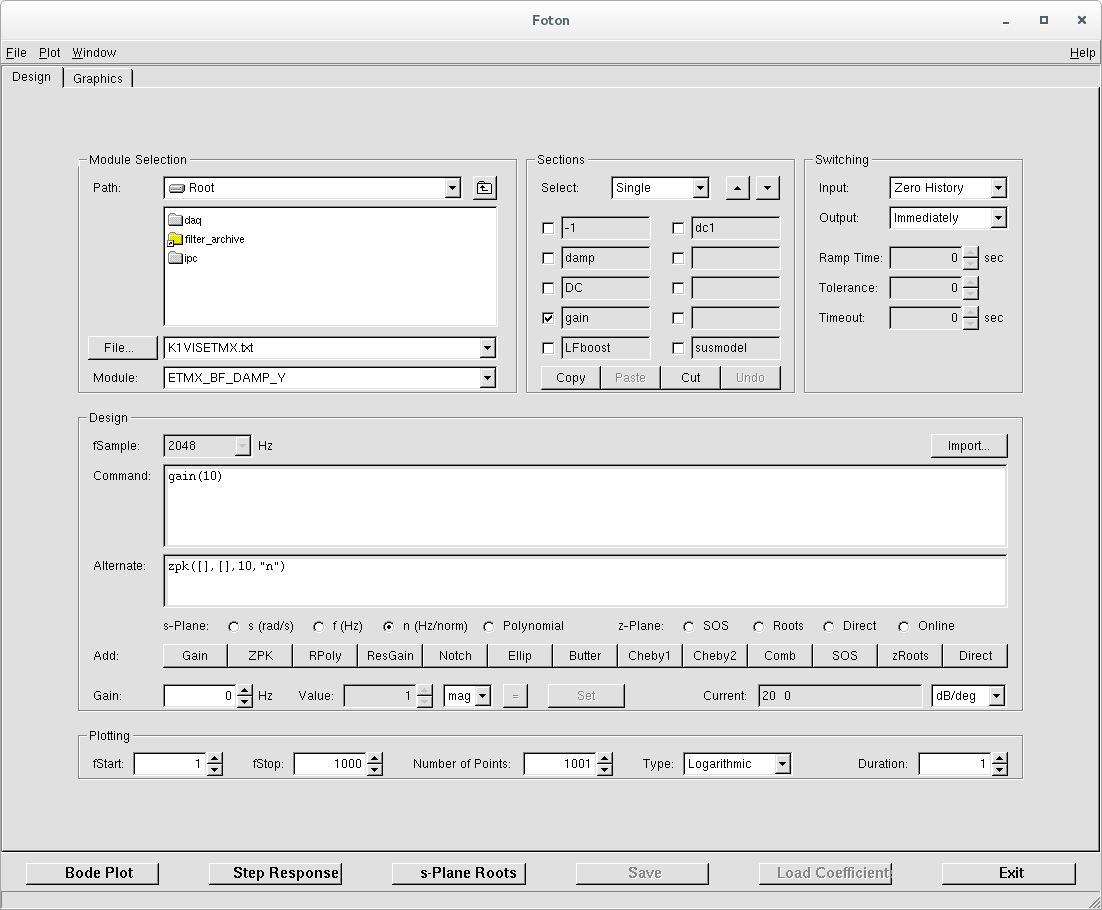
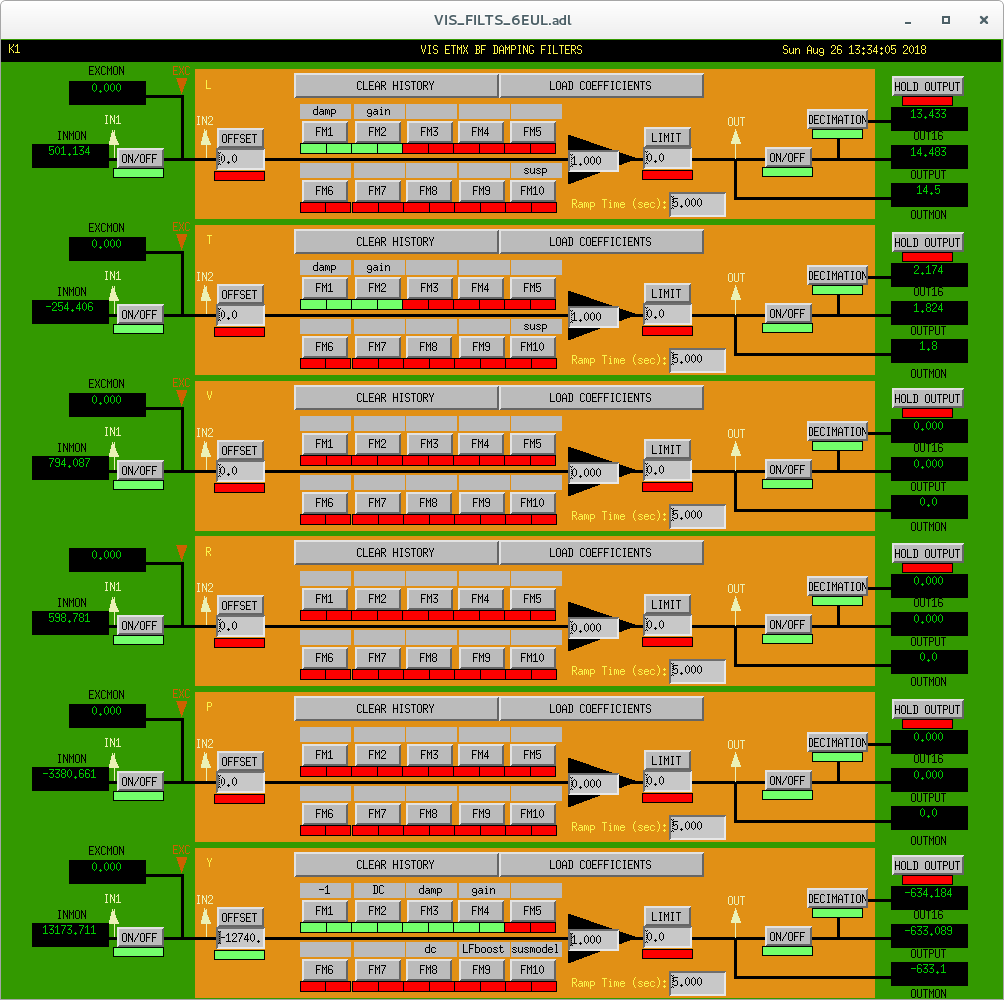
- BF stage Fig.5, Fig.6, Fig.7, Fig.8, Fig.9, Fig.10
About BF Long and Trans, don't need [-1]gain for damping.
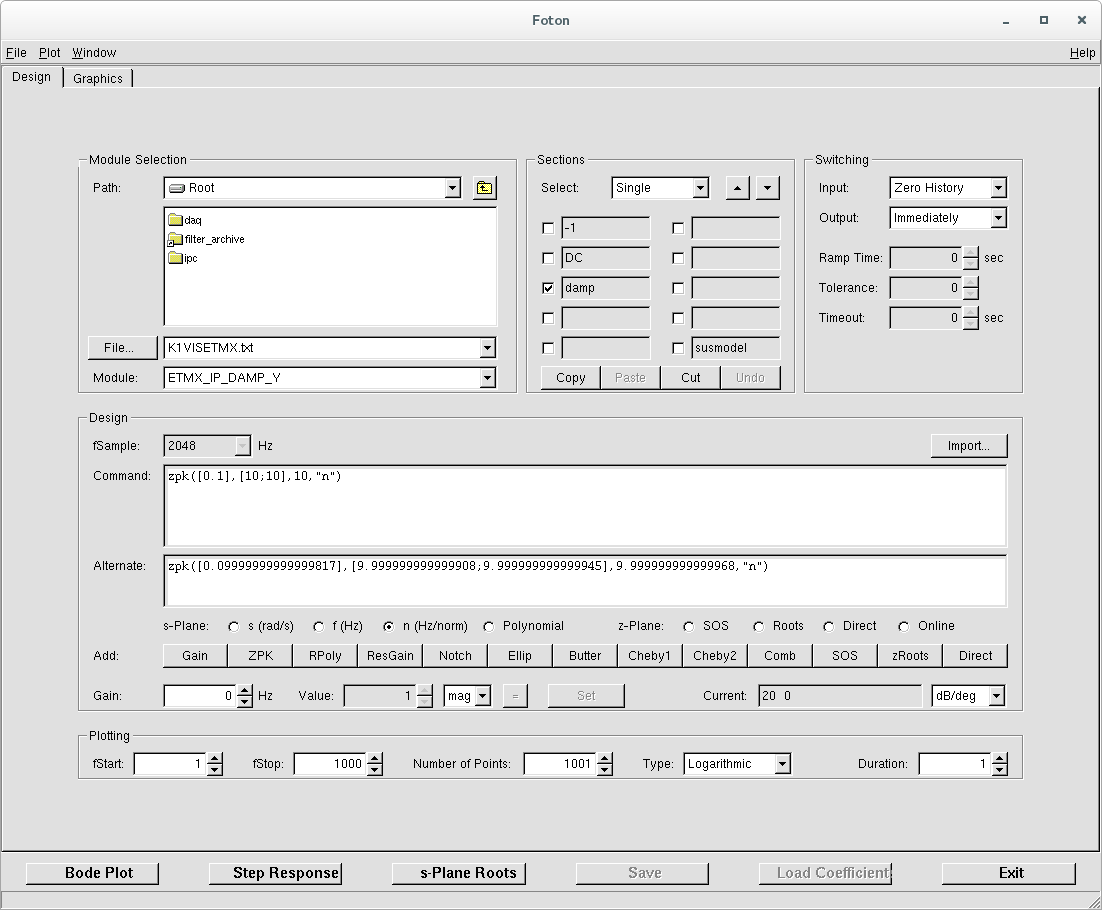
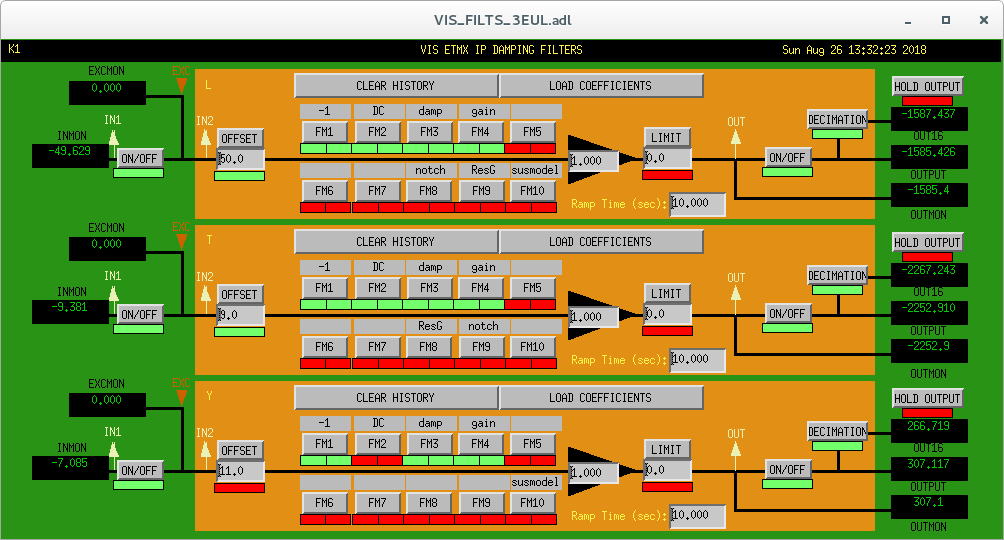
- IP stage Fig.11, Fig.12, Fig.13, Fig.14, Fig.15, Fig.16
And about Gain, after we wait and see the behaviour of the suspension at this condition during one day, we set these value.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}