[ELEONORA, IZUMI, ASO, SHODA]
We are trying to diagnalize the sensing of the BS intermediate mass and possibly to develop a reliable procedure to apply to other suspensions.
We have 6 OSEM (3 veritical and 3 orizontal) and their signals are combined to reconstruct the motion of the mass in its 6 DOFs.
(We don't have any Oplev to be used as reference in this case.)
1) We have measured the auto-transfer function for all the DOFs in order to individuate their normal modes. (First plot in the attachment.)
2) We have measured the cross-transfer function from each DOF with the others. If a cross transfer function shows a peak which only belongs to the DOF that is being excited we assumed that it is due to a coupling in the sensing. (See plots from 2 to 7 in the attachment.)
3) Comparing the amplitude of the the peaks we estimated the amout of sensing coupling between each combination of DOF.
4) We can now write a sensing matrix (with the off-diagonal elements we have measured) and use its inverse to diagonalize the sensing. (STILL TO BE DONE..)
Some issues found:
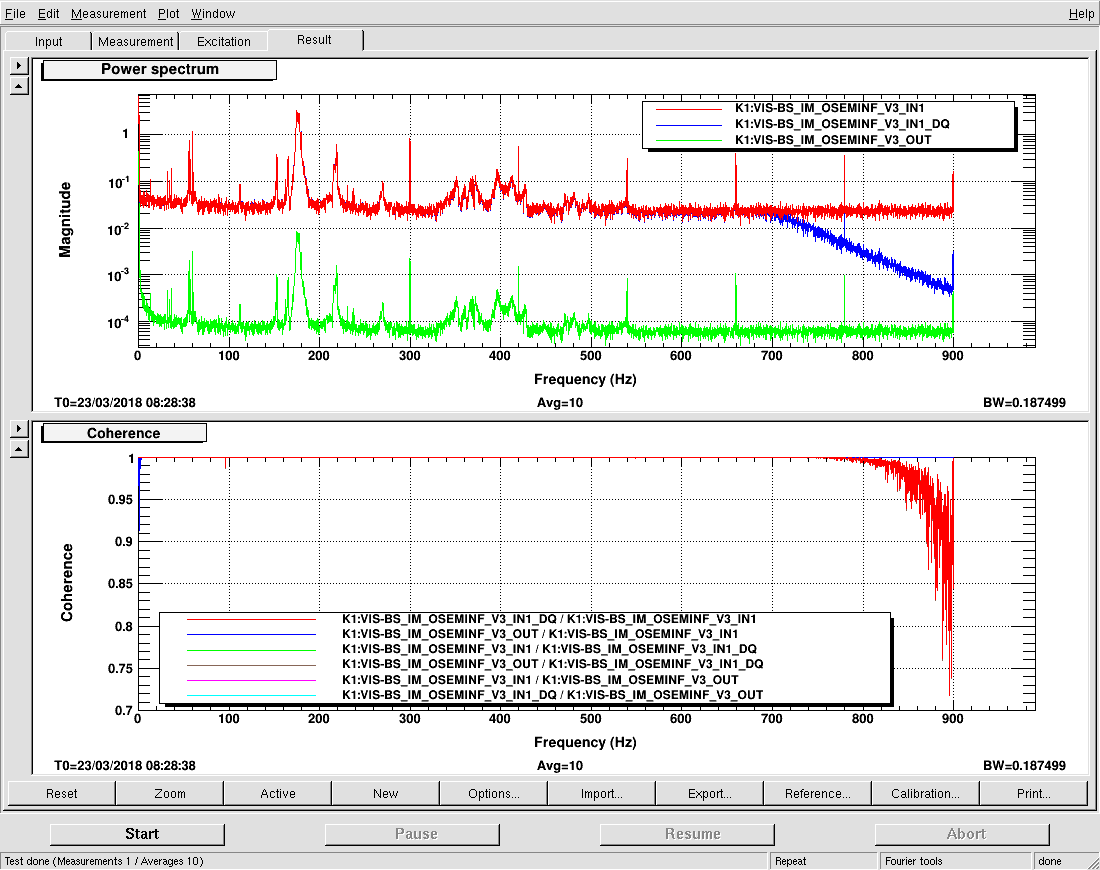
1) As a first check, I measured the open loop spectra for all the DOFs and for all the 6 sensors (plots 8 and 9 in the attachment). I have notice that V3 as a quite large noise. It didn’t seem to affect the reconstruceted signals, but it looks very strange.
2) When I excite the vertical motion I get larger signal in roll than in the vertical itself. (See plot 5). This is indeed very stange. More investingation has to be done.
3) Also pitch shows a large couplig (more than 30%) with Roll.
3) The off-diagonal elements of the sensing matrix are not symmetric. It means that the amount of sensing coupling that I measure when I excite, for example, pitch and look at yaw is not the same if I do the other way round. I cannot imagine a configuration that brings to this asymmetry but maybe it is reasonable?
4) Longitudinal and Tranverse TFs are degenerated (as it should be ) and also their normal modes coincides with those of others DOF so this is difficult to apply this diagonalization technique to them. Probably is fine to leave them as they are.
The data of the TFs have been saved in .xml files in the folder /users/eleonora/TF_BS_IM



{kind=link}
{kind=link}
{kind=link}