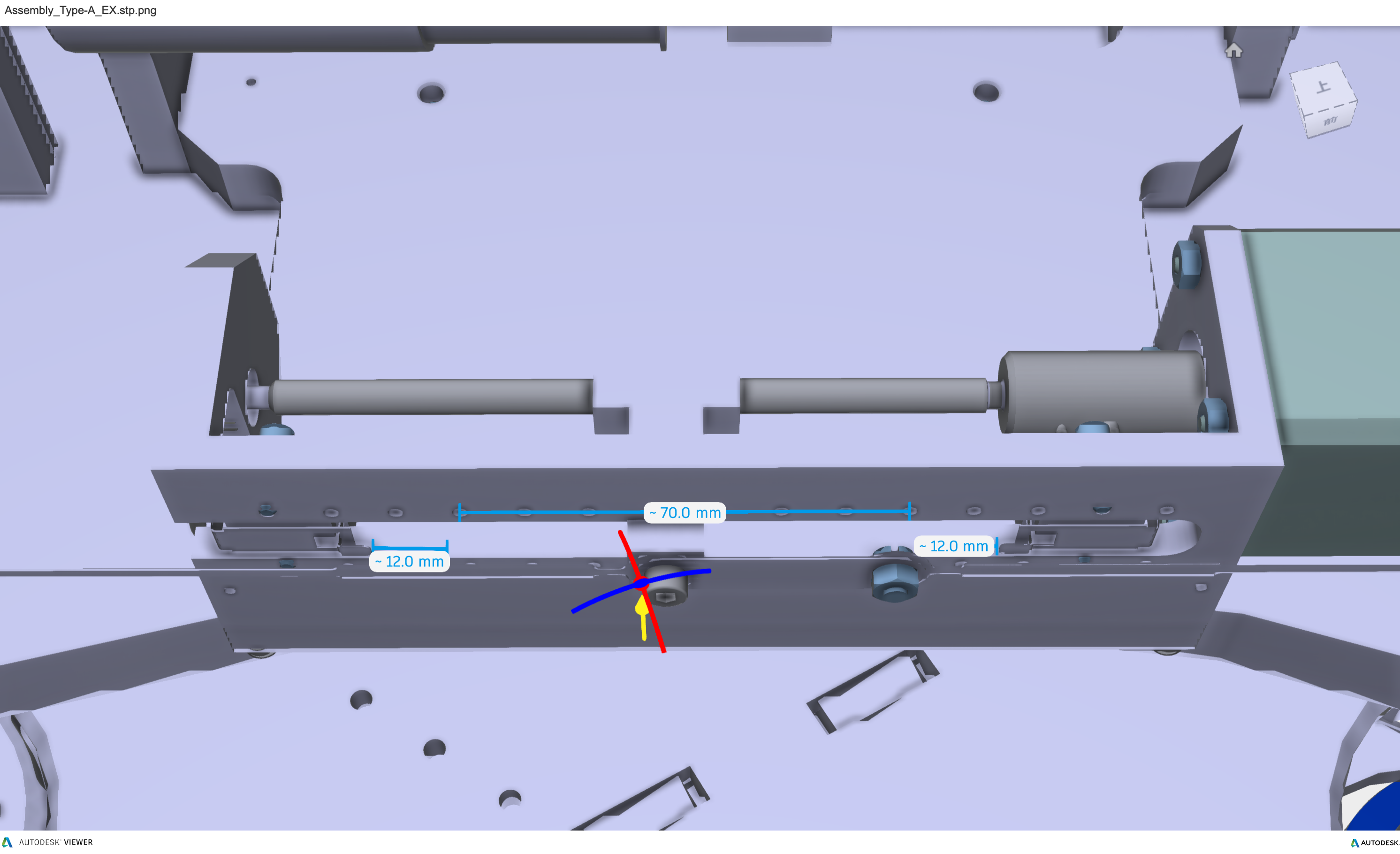
/Dropbox/Subsystems/VIS/TypeA/STEP/Assembly_TypeA_EX.stp
From the CAD data, I tried to figure out the drivable area of each IP of Type-A.
The distance between the screw holes is 10mm, so the actual position of the stepper motor is calculated from the screw holes based on this.
There is one point of difference between the CAD and the current situation.
The connection.strip that attaches the T-type drive part and FR spring is bolted to the left side in the CAD, but in reality it is on the right.
The driving part of the T-type stepper motor is 24mm wide, and the center of this width is the position of the motor.
From the above, the position of the motor can be moved up to 12mm from the limit switch.
From the CAD, the driveable area is from the 5th to the 12th position counting from the motor side.
Therefore, the drive range between the left and right limit switches is 70mm, but the drive range is limited to 90%, from 5.5 to 11.5.
Next, the current position of the stepper motor of the ETMX IP was the following value.
| H1 | -298,489[count]. |
| H2 | 291,013[count]. |
| H3 | 21,024[count]. |
The actual position is shown in the attached photo of K-Log#16159, counting the position of the holes from the motor side, and it is at the following position
Consider this as the current position of the motor.
| H1 | 6.9 (=69[mm]) |
| H2 | 9.8 (=98[mm]) |
| H3 | 7.2 (=72[mm]) |
Since the drivable range is from 55[mm] to 115[mm] (5.5 to 11.5), we consider the distance to each position.
| | to 55[mm] | to 115[mm] |
| H1 | -14[mm] | +46[mm] |
| H2 | -43[mm] | +17[mm] |
| H3 | -17[mm] | +43[mm] |
Calculate and set the drivable area of each motor from the distance.
Since 51,200[count]/M6 screw pitch 1[mm] per motor revolution, multiply the above and add it to the position of the stepper motor.
| | Min | Max |
| H1 | -1015289 (=-298,489-14*51200)[count] | 2056711 (=-298,489+46*51200)[count]) |
| H2 | -1910587 (=291,013-43*51200[count]) | 1161413 (=291,013+17*51200[count]) |
| H3 | -849376 (= 21,024-17*51200[count]), | 2222624 (=21,024+43*51200[count]) |
This is the software limit range.
After setting sitemap-STEPPING MOTOR-STEPPER_OVERVIEW-Limit Min[steps] and Limit Max[steps], write with [L].
Also, set the limit SW of ETMX IP-H1, H2 and H3 as effective.
sitemap-STEPPING MOTOR-STEPPER_OVERVIEW-LR Set 1 (enable) to Distance[steps or SW] and write with [D].

{kind=link}