I offloaded the coil-magnet actuation onto the IP horizontal fishing rods. At the end of the work I left the suspension in TWR_DAMPED.
When the IP control system is on the amount of actuation now becomes, approximately:
- L: 2200 cnt,
- T: 2500 cnt,
- Y: 3400 cnt,
- H1: -8000 cnt,
- H2: 6000 cnt,
- H3: 5900 cnt.
In terms of displacement the current position in SAFE mode is
- L: 290 um,
- T: 462 um and
- -720 urad.
- Time: 02:19:00 UTC on 2020-04-01.
The set point is
- 100 um,
- 200 um and
- -706 urad.
Before offloading the position of the IP in SAFE state (K1:GRD-VIS_ITMY_STATE_N = 30) was
- L: 276 um,
- T: 1114 um
- Y: -831 urad
- Time: before 00:46:00 UTC on 2020-04-01.
Note also that
- Ramp time in the IP DAMP filter box was 60 seconds and I left it as it was.
- By mistake I moved the top filter yaw stepper motor by 10,000 counts, but I moved back and it seems to be alright.
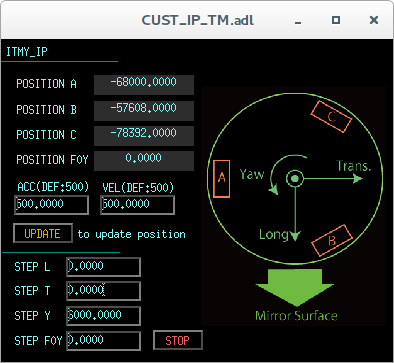
After the work I engaged TWR_DAMPED. The control system of the IP and of the BF look alright. The picture shows the total amount of steps required.

{kind=link}