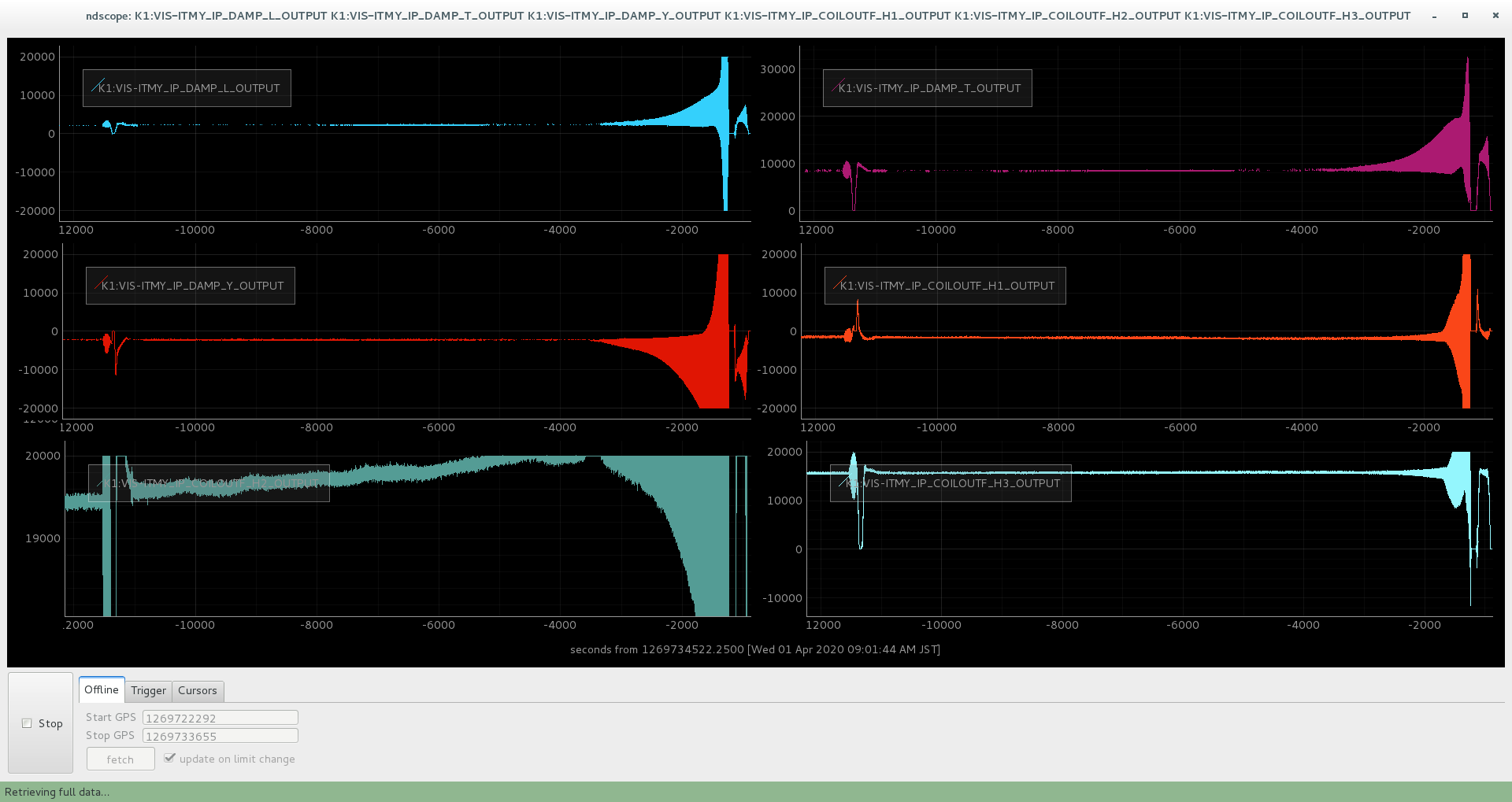
Around 7:15 today, H2 coil of IP of ITMY was satulated (20000 couts).
We should off-load.
Around 7:15 today, H2 coil of IP of ITMY was satulated (20000 couts).
We should off-load.
I offloaded the coil-magnet actuation onto the IP horizontal fishing rods. At the end of the work I left the suspension in TWR_DAMPED.
When the IP control system is on the amount of actuation now becomes, approximately:
In terms of displacement the current position in SAFE mode is
The set point is
Before offloading the position of the IP in SAFE state (K1:GRD-VIS_ITMY_STATE_N = 30) was
Note also that
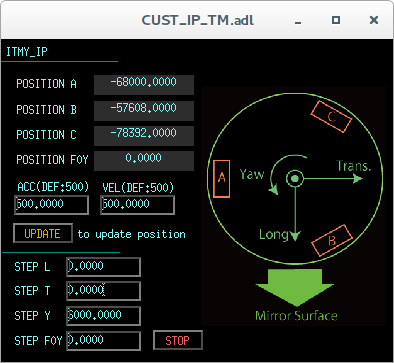
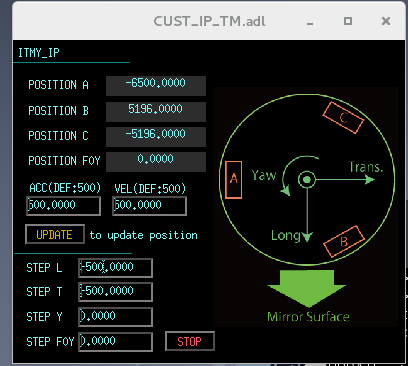
After the work I engaged TWR_DAMPED. The control system of the IP and of the BF look alright. The picture shows the total amount of steps required.
The IY IP coil outputs are still to large and this means that the IP is still far from the nominal set point. To reduce the coil outputs so to have ess than 3000 counts for each one, I moved a bit more the stepping motors.
Below some detail of this work.
The IP set point is
L: 100 um,
T: 200 um
Y: -706 urad.
To measure how far the IP was far from the set point I requested towe damped to guardian, I turned off the BF_Y and IP loops and I monitored the ITMY_IP_DAMP_{L,T,Y}_IN1 signal:
L: 250 um
T: 300 um
Y: -25 urad
To reduce these values, I moved L and T stepping motors:
-Pic1 shows the total numbers of the step done to bring the IP close to the nominal position
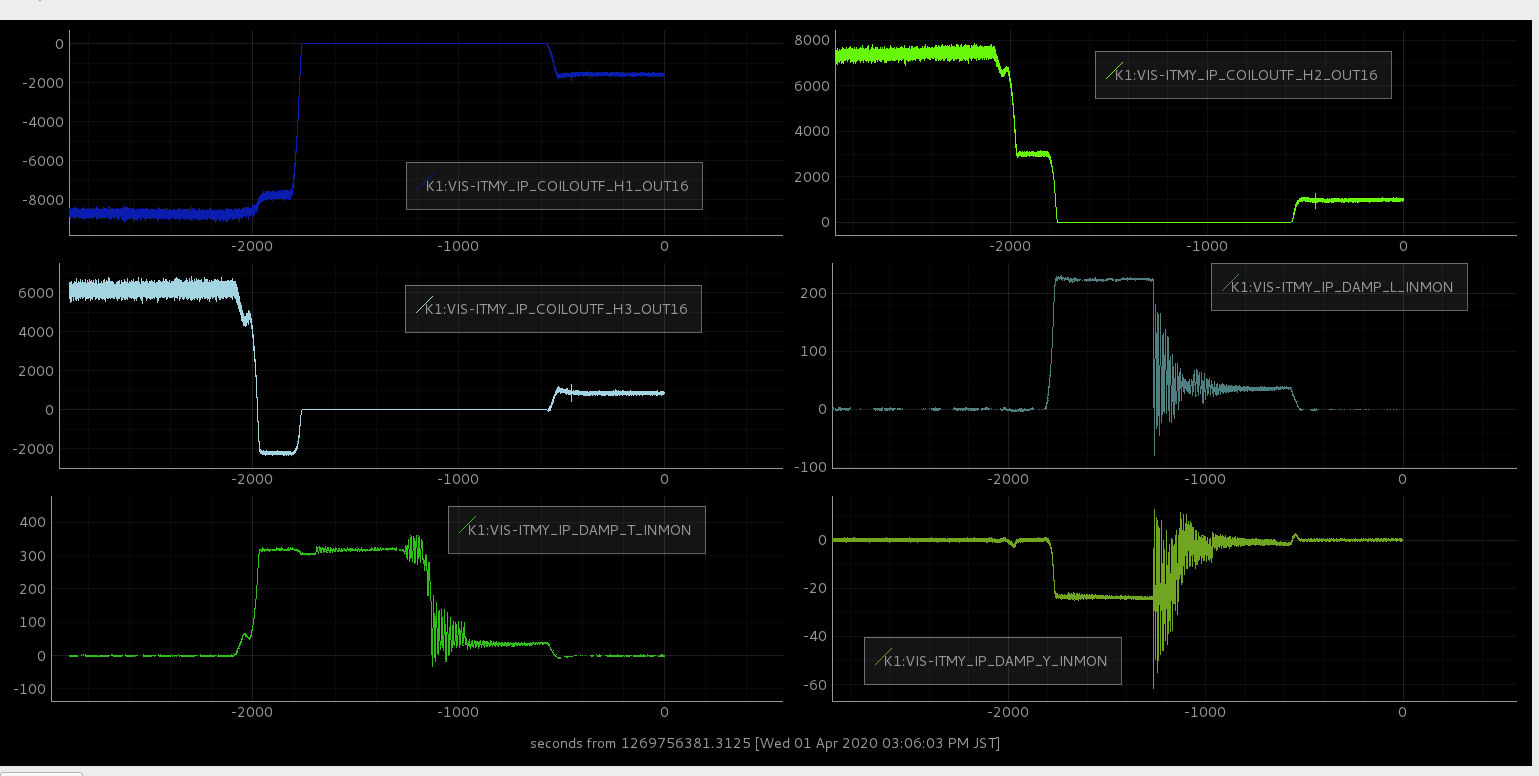
Pic1 shows the IP_DAMP_{L,T,Y}_IN1 and ITMY_IP_{H1,H2,H3}_COILOUT before and after the IP position done with stepping motors.
The coil outputs are less than 2000 counts.




{kind=link}
{kind=link}
{kind=link}
{kind=link}