K. Miyo, Y. Fujii,
= ETMX / ITMX =
-
After klog#10268, we modified the sensor correction fiter for ETMX/ITMX-IPL to:
- ETMX-IPL: zpk([],[0],0.15915494,"n")*ellip("HighPass",2,10,100,0.01)gain(3.107)* butter("HighPass",4,0.0005)
- ITMX-IPL: zpk([],[0],0.15915494,"n")*ellip("HighPass",2,10,80,0.02)gain(2.933)* butter("HighPass",4,0.0005)
- The difference above is the cut-off frequency; 0.01Hz for ETMX and 0.02Hz for ITMX.
- After adding low-pass properly, the observed drift was removed.
-
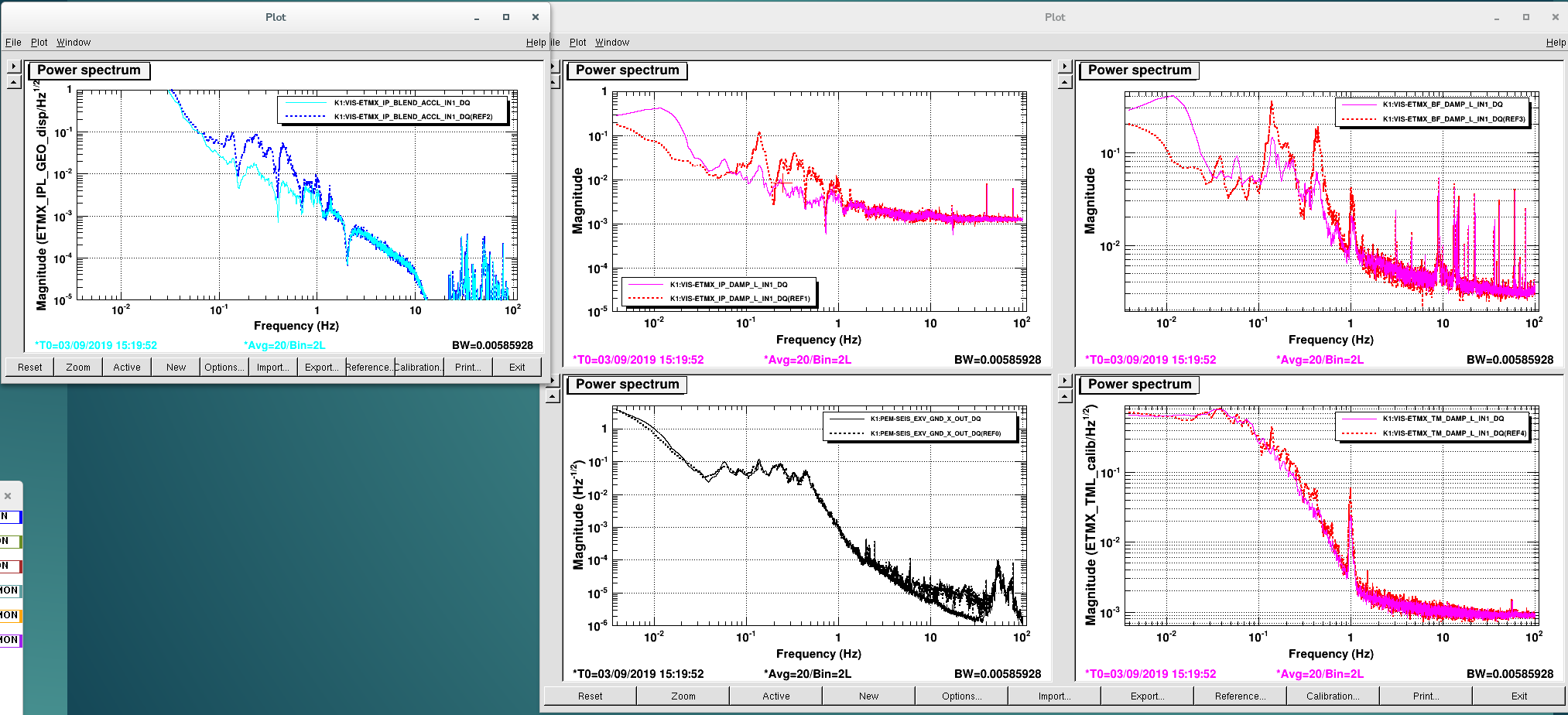
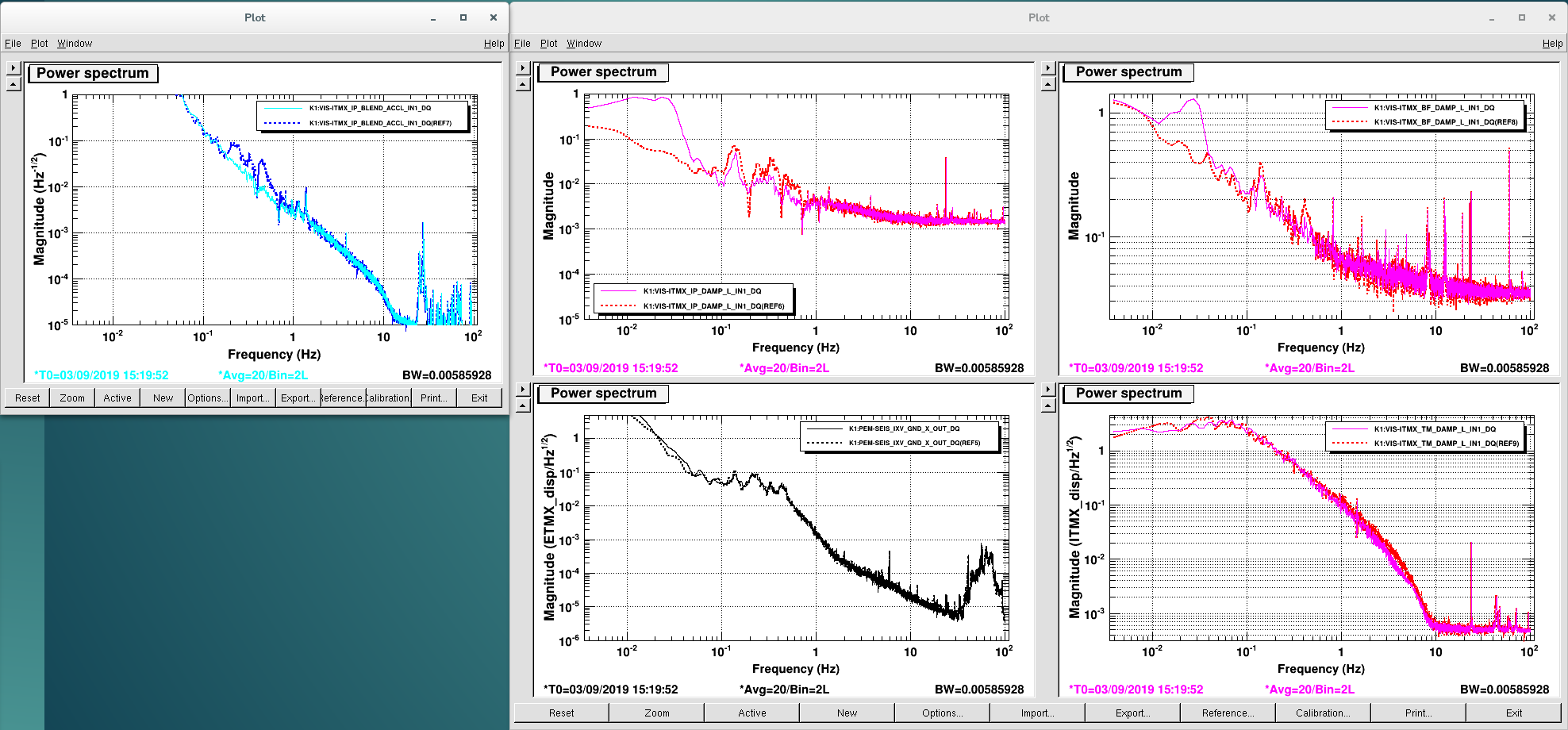
The spectra w/ and w/o IP-L sensor correction if ETMX / ITMX are shown in Figure 1 and 2.
- Dashed (labeled 'REF') is the ones w/o sensor correction path, while the solid ones are w/ sensor correction path.
- In this measurement, dcdamp loop is used at IP, and BF-loops are opened.
-
In the oplev signal, the TM motion was masked by the seismic motion (and oplev noise level), and I could not find difference at TM-stage.
-
This was consistent with a simple simulation (w/o sensor correction case) as Figure 3 (pdf) shows.
- Only the following is interesting here; the green dots (measured TMoplev spectrum), the black curve (measured ground motion), and the red one (expected TMoplev spectrum based on the ground motion and the implemented loops) .
- It seemed that the green dots covered the expected TM spectrum structure at lower frequency than ~1Hz.
-
This was consistent with a simple simulation (w/o sensor correction case) as Figure 3 (pdf) shows.
- Further test about suppression performance will be tested again when the seismic level was high, at like this week end.
- As another tppic, in order to take a look at the impact to the arm cavity, a similar filers are prepared/implemented to ETMX-IP / ITMX-IP(L dof).
-
For this purpose, currently the following setting is used at ETMX / ITMX suspensions.
- The sensor correction fiters are engaged only for IPL.
- The BF-L/T loops are opened.
- dc+damping with LVDT at IP-stage.
- This setting is to be set back in the next early morning.
- This result will follow.


{kind=link}
{kind=link}