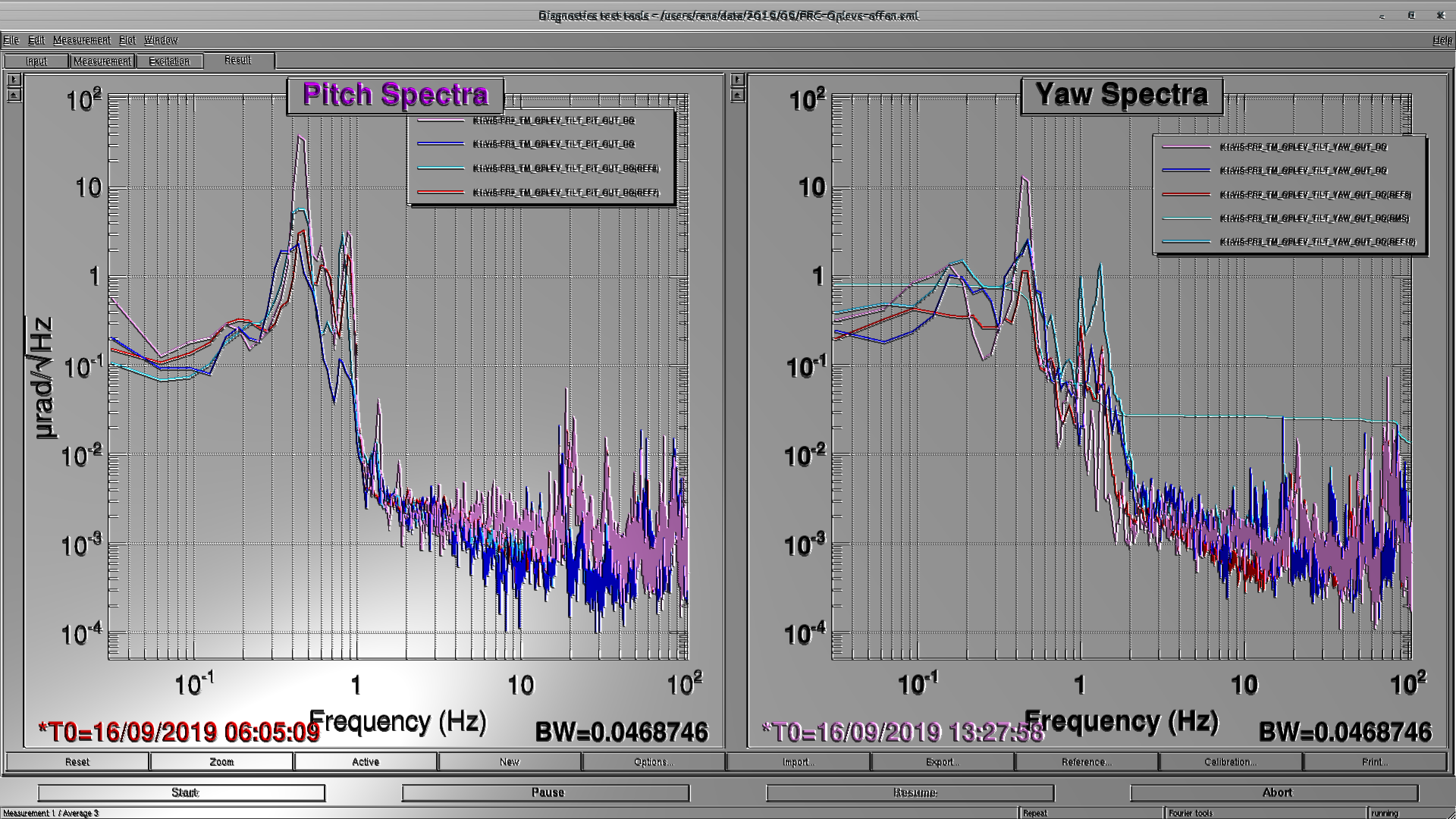
The PR3 oplev damping had some problems and so we have modified and simplified it. Pitch is OK, but the low frequency yaw motion needs more work.
- the previous design had DC gain, so it was used to hold the mirror alignment to the OL QPDs. I removed this DC part so we can DC couple some upper stage and just use the TM stage for the reduction of motion in the 0.1 - 3 Hz band. This makes the filter design easier.
- The DC coupling was making the suspension trip the watchdog since the applied torque was too strong when the Guardian tried to align the mirror.
- The boosts in the previous design made it conditionally stable.
- The new design is just velocity damping and a 13 Hz low pass filter.
The pitch loop is working well, but the 0.15 Hz yaw mode (which probably comes from the upper stages of the Type Bp suspension) is not dampable from the bottom stage, so we'll have to figure out what to do above. Similarly, the 0.1 Hz mode is not simple to damp.
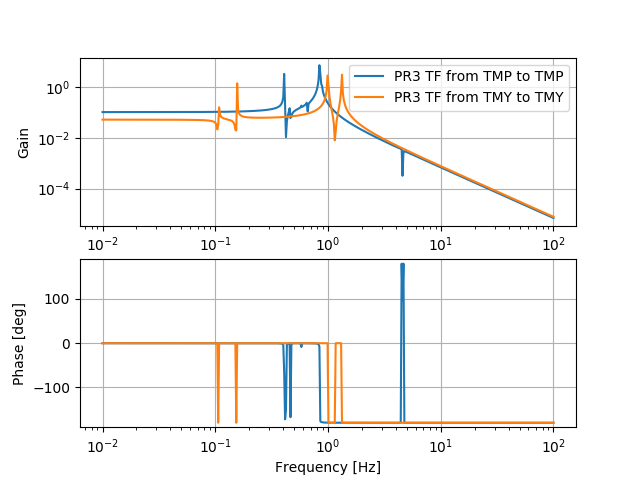
The 2nd attachment shows the plant models that I got from this very nice Model Plotter webpage. I wish we had this kind of thing in LIGO.

{kind=link}
{kind=link}
{kind=link}