[Yamamoto, Ushiba]
Abstract:
We found the power on REFL PDA1 decreased around 1:45 JST today.
After several investigation, we found the IFO REFL HWP is not rotated when we moved it to REV direction from the nominal position.
We adjusted the power on REFL PDA1 tonominal values, and currently HWP angle is 55 degs.
Detail:
Since Yokozawa-san reported that FPMI cannot be locked (klog23050), I invstigated the reason.
Then, I found that laser power on REFL PDA1 was very small (0.001 mW).
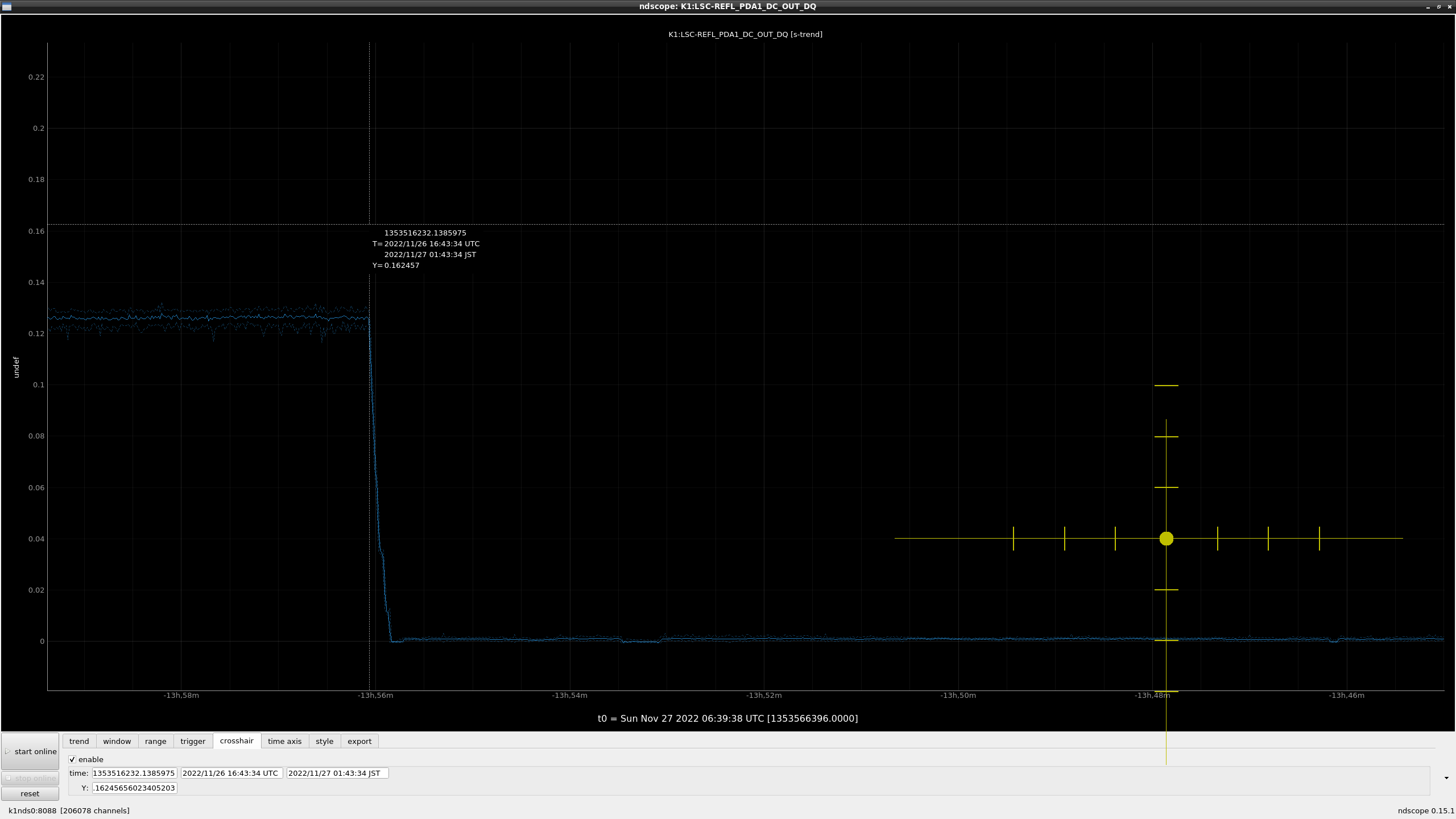
We investigated when it happened and found that it was about 1:45 JST (fig1).
However, there are no large suspension angle changes at that time.
So, we entered the mine and check the REFL table and confirmed the beam is comming to the REFL.
Also, the beam shape on the sensor card looks good (seems no clipping).
Then, we checked the HWP angle was nominal value (95 degs).
After that, we checked the log of HWP angle and REFL power, and then found that the REFL power didn't change when it was rotated from 95 degs to 70 degs.
So, I moved HWP so that the REFL power becomes almost nominal (0.11 mW).
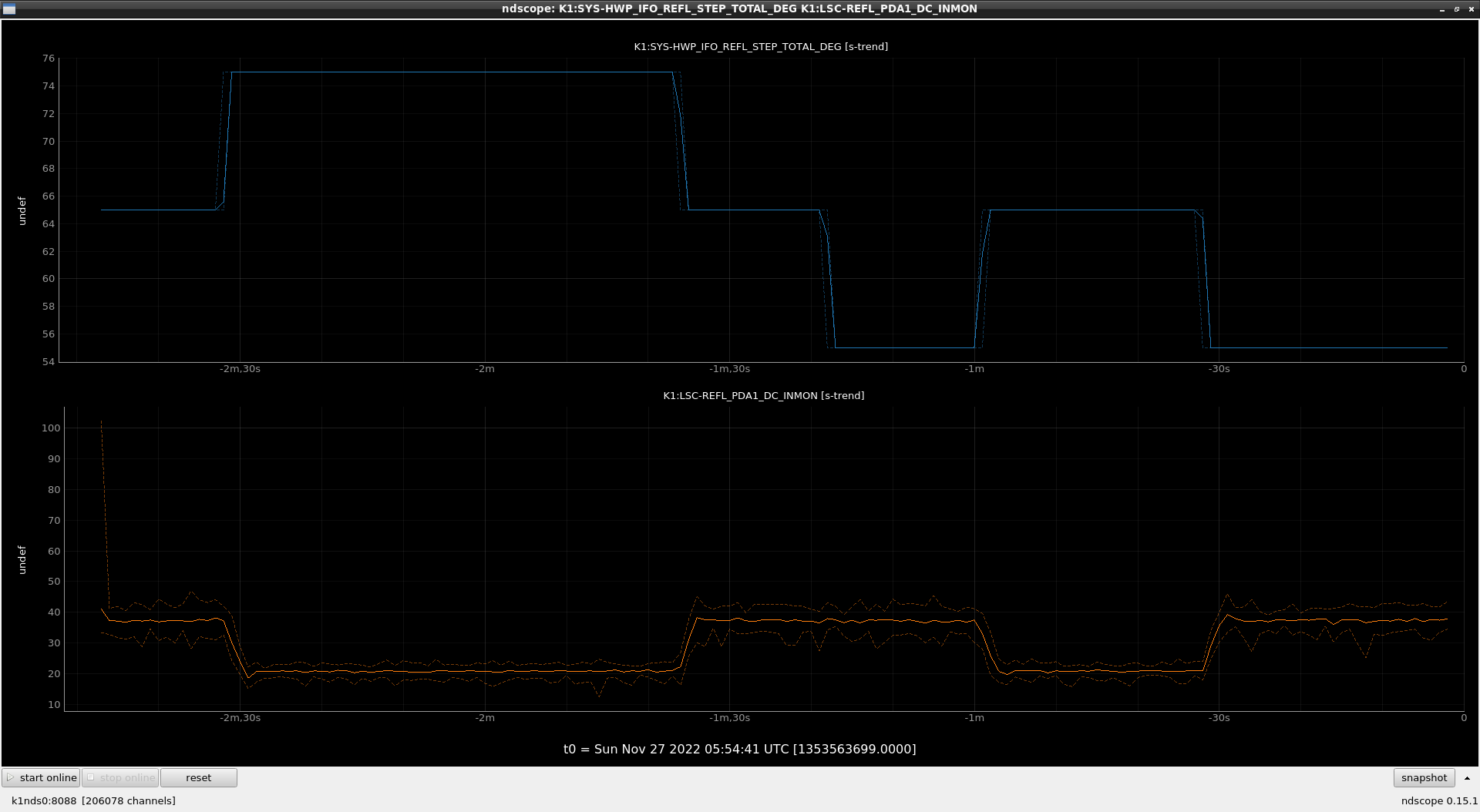
After that, we checked the HWP motion and found that HWP cannot be moved to REV direction from there (fig2).
One possible reason is that HWP motor reaches the edge of its range and doesn't move to REV direction.
So, we need to investigate it and if so, we need to move the motor manually and save the range.
Note:
I'm not sure who rotated HWP for what kind of purpose but please ckeck the corresponding PD output (in the case of IFO REFL, REFL PDA1 output) when moving HWP.


{kind=link}
{kind=link}