with Ushiba-san,
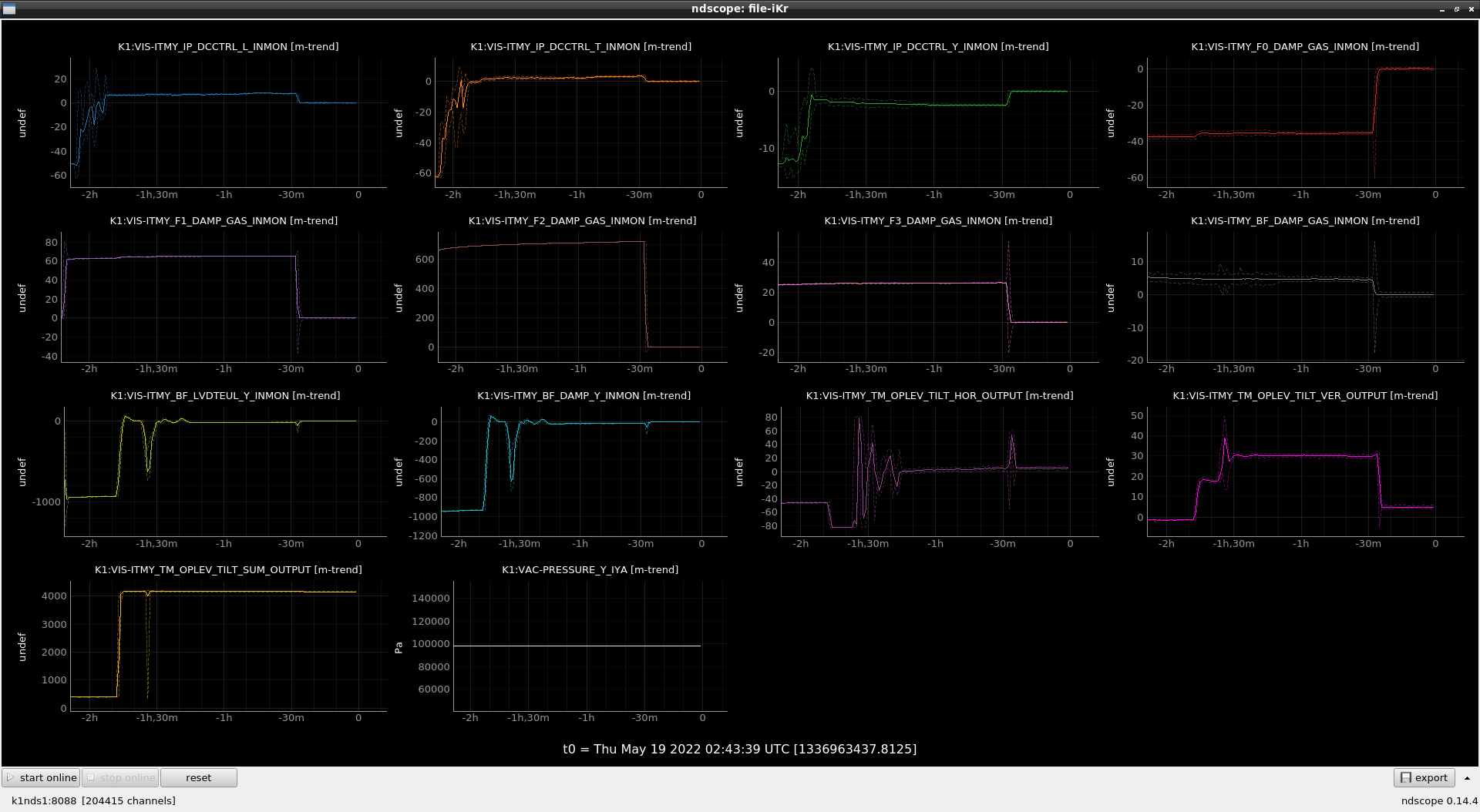
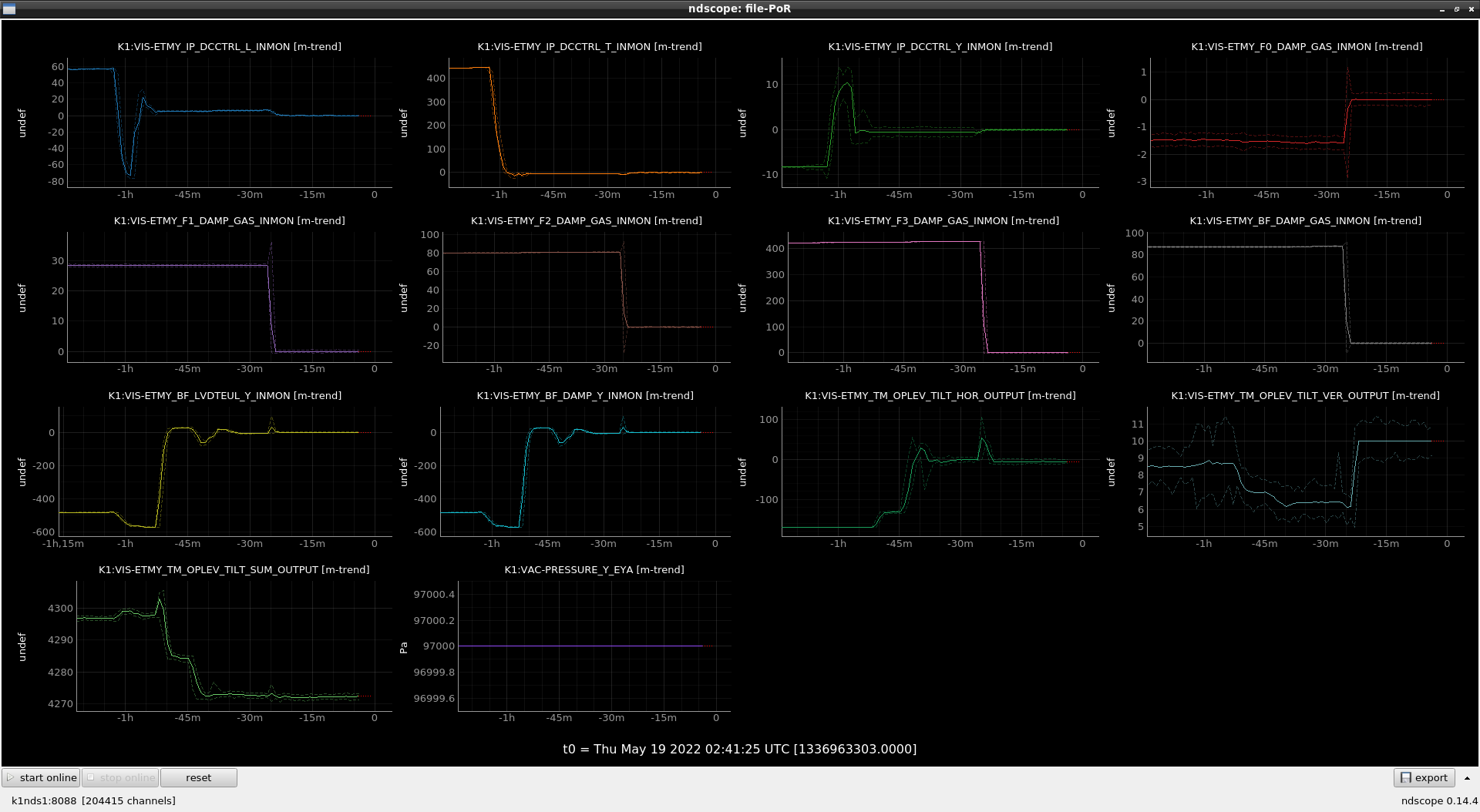
Preparing for evacuation, I offloaded the IP_L,T,Y and F0_Y of IY and EY, using Stepper Motor.
After that I operated the Pico Motor to center the Oplev_TILT_HOR.
The total steps I adjusted were as follows;
[IY]
IP_L: 1400 steps
IP_T: 1400 steps
IP_Y: 1600 steps
F0_Y: 13500 steps
pico BF_yaw: -2100 steps
[EY]
IP_L: 1500 steps
IP_T: -8900 steps
IP_Y: -2100 steps
F0_Y: 5200 steps
pico BF_yaw: -450 steps


{kind=link}
{kind=link}