As is described in 19402, one potential source of the 0.2 Hz oscillation in TM Yaw was thought to be a problem in the IP controls, so I updated the IP controls according to the SR2 workflow.
The updated controls didn't solve the issue and it turned out the SR3 was rubbing somewhere as described in 19403, and it was fixed and the 0.2 Hz oscillation disappeared.
Since I updated the controls of the IP, I updated other controls as well for the sake of consistency. I modified Guardian so it uses DC control at TM at the ALIGN state.
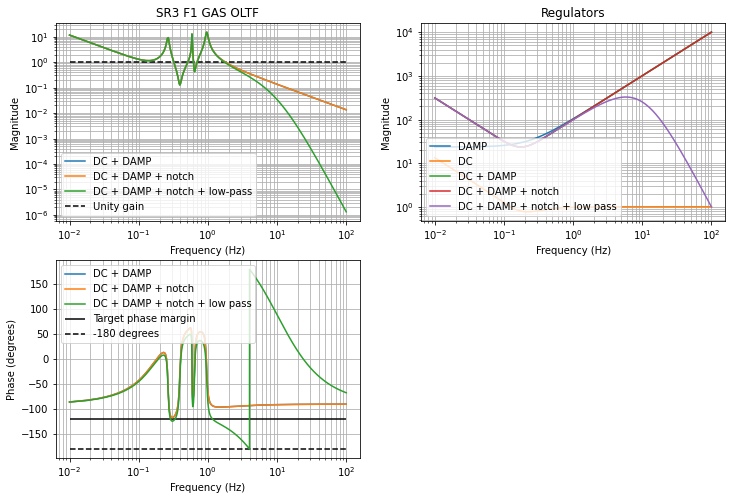
F1 loop cannot be closed and we found the issue (thanks to Ushiba-san's guess).
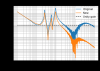
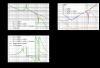
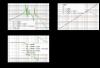
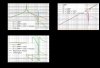
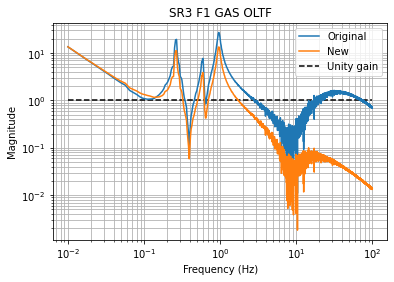
The F1 problem was due to coil2LVDT coupling, as shown as an f^2 increase in transfer function at around 10 Hz, see figure 3 from 17956.
I used the transfer function data itself to estimate the OLTF and it's plotted in Fig.1 (blue curve)
And Indeed, the coupling was peaking out of the unity gain so it's causing the instability in the loop. We need to be careful in the future.
I improvised by reducing the damping gain (to maintain stability) and reducing the cutoff frequency of the 4th-order low-pass filter from 23.1 Hz to 10 Hz.
The new OLTF is shown in Fig.1 (orange curve).
The F1 GAS control can be engaged fine with this control filter.
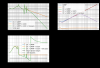
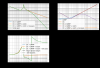
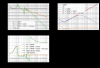
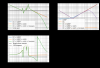
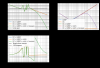
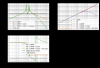
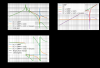
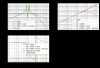
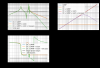
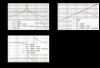
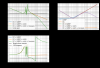
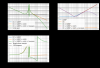
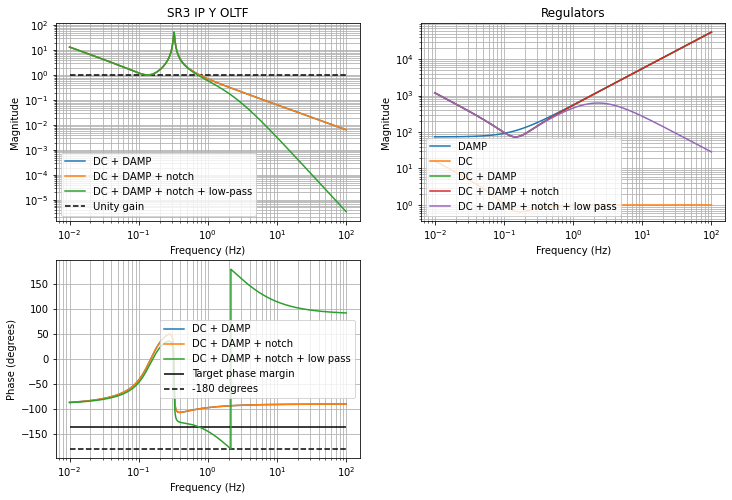
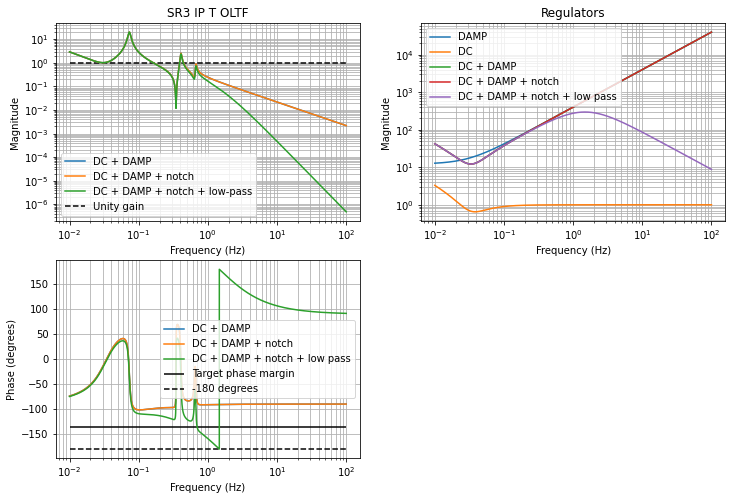
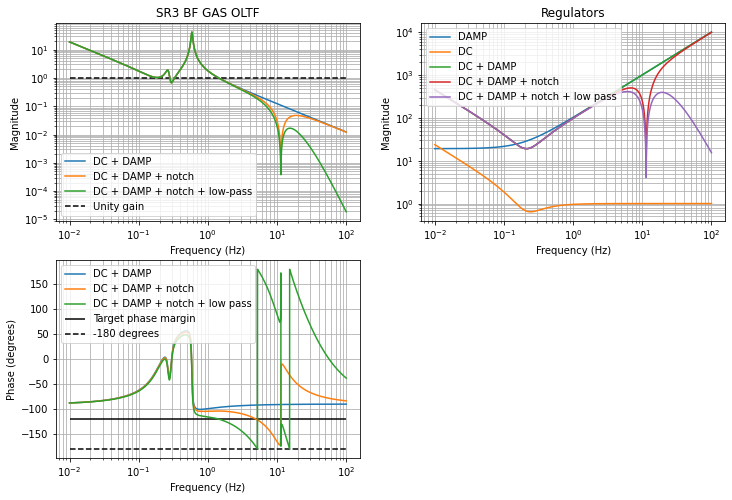
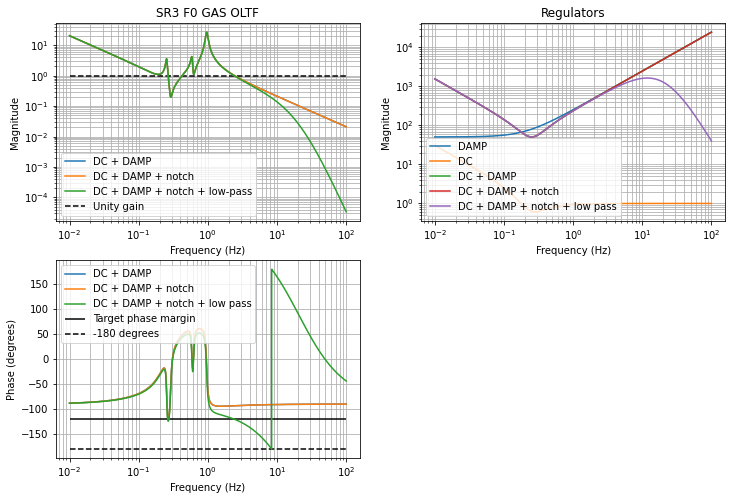
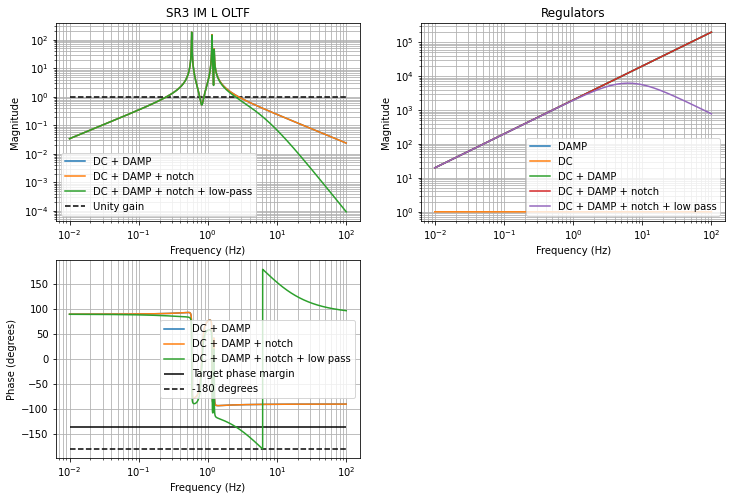
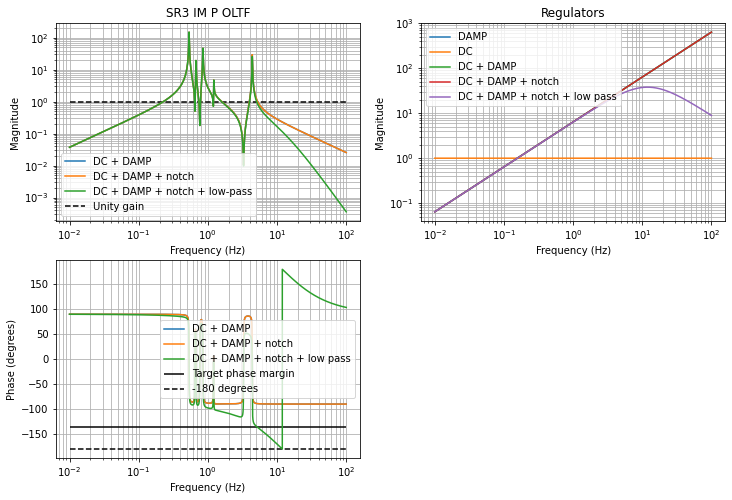
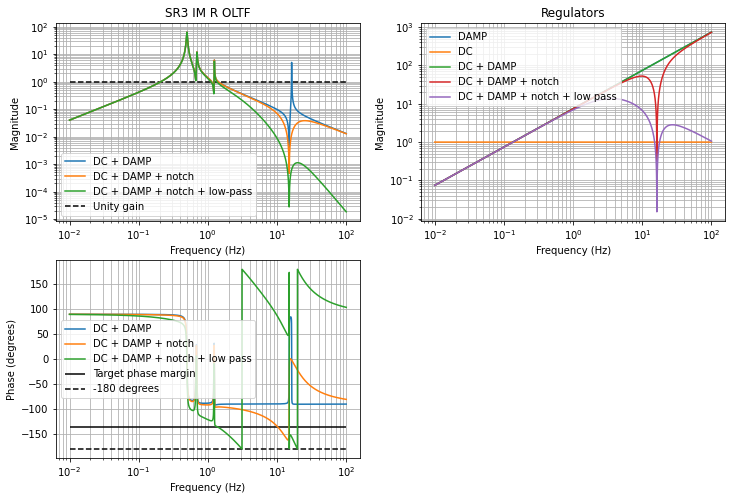
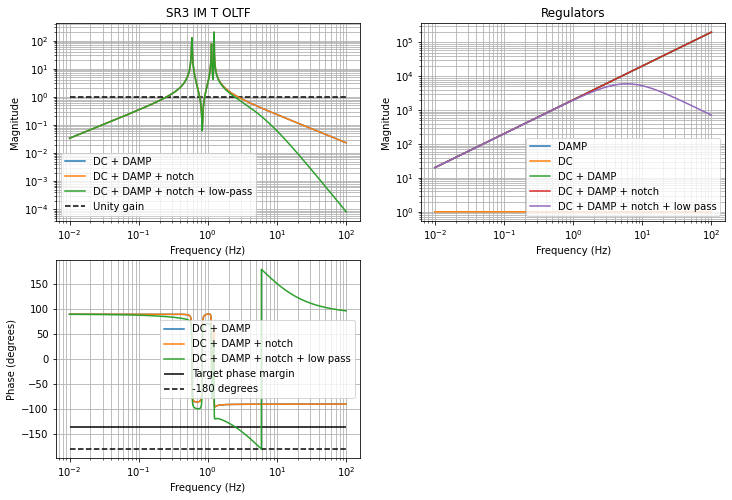
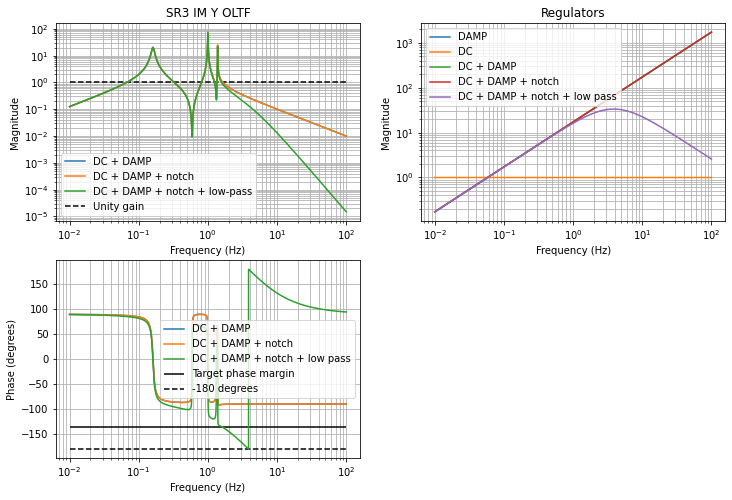
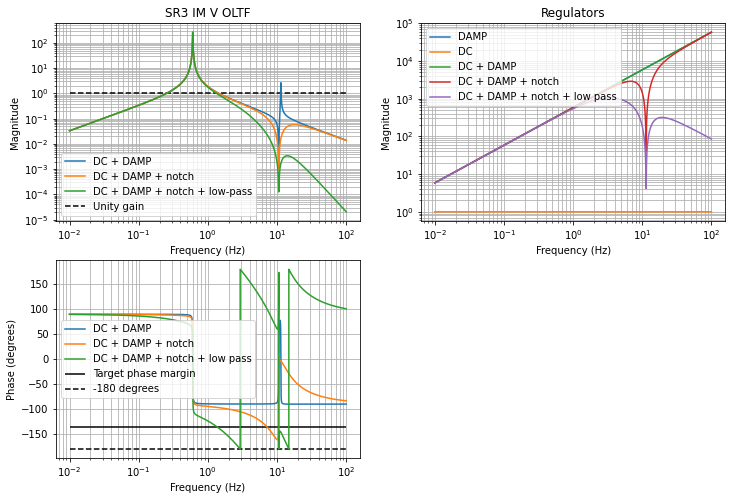
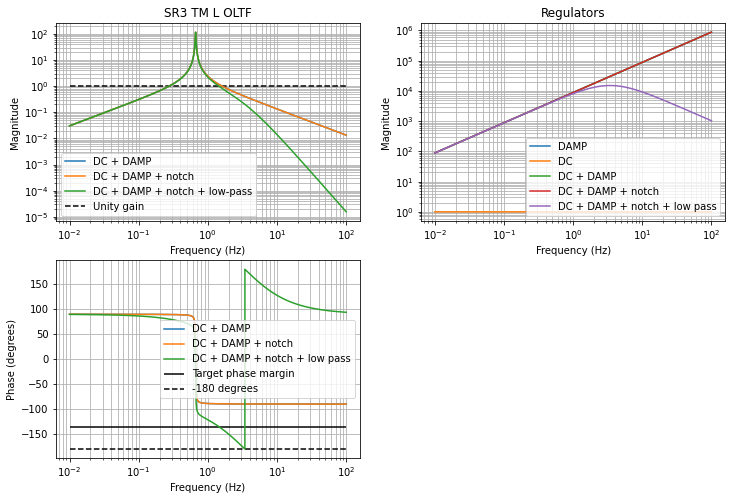
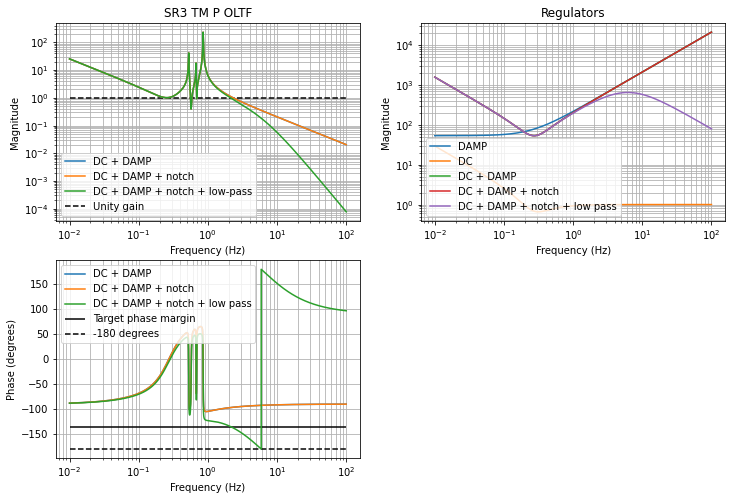
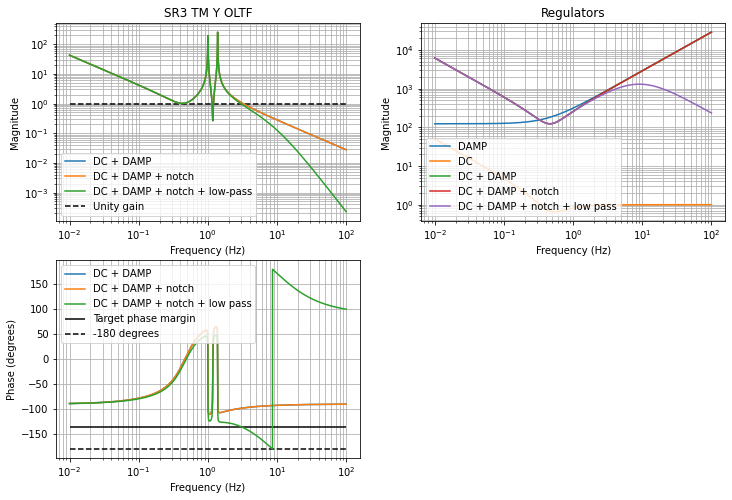
All control filters/OLTFs are summarized in Fig 2-Fig.16.
All filters/plots are reproducible from notebooks at /kagra/Dropbox/Subsystems/VIS/vis_comissioning/sr3/notebook/control/
In addition, I also amended the TM_SENSALIGN matrix for better decoupling of L, P, and Y (sorry results are not shown here)
The new matrix is
[[1.00024608e+00, -1.05219162e-02, 2.25727052e-02],
[-2.33428723e-02, 9.98096080e-01, -2.21856712e-02],
[-7.87533002e-04, 3.36733883e-02, 9.99127487e-01]].
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}