With the calibration factors obtained, I put followings
K1:VIS-SRM_TM_OPLEV_LEN_VER_GAIN: 1/7.39*1000 = 135.318 [um/counts]
K1:VIS-SRM_TM_OPLEV_LEN_HOR_GAIN: 1/6.37*1000 = 148.599 [um/counts]
K1:VIS-SRM_TM_OPLEV_TILT_VER_GAIN: 1/1.3*1000 = 749.230 [um/counts]
K1:VIS-SRM_TM_OPLEV_TILT_HOR_GAIN: 1/1.22*1000 = 819.670 [um/counts]
which would calibrate K1:VIS-SRM_TM_OPLEV_{LEN, TILT}_{VER, HOR}_OUT to the beamspot positions at the QPD planes, in microns.
Using old length data from 7952, I obtained the OPLEV2EUL matrix as shown in Fig. 1. To reproduce, consult Eqn. (20) in JGW-T2112874 or visit the notebook in /kagra/Dropbox/Subsystems/VIS/vis_commissioning/srm/notebook/sensing_matrices/optical_lever.ipynb
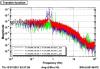
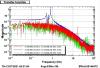
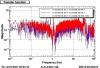
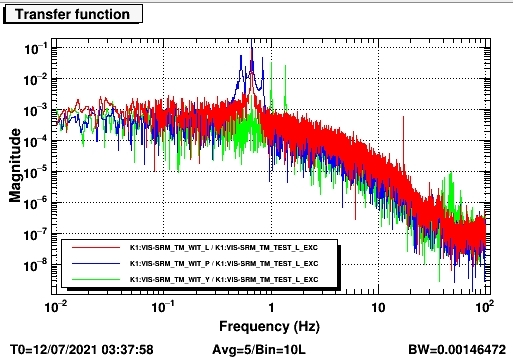
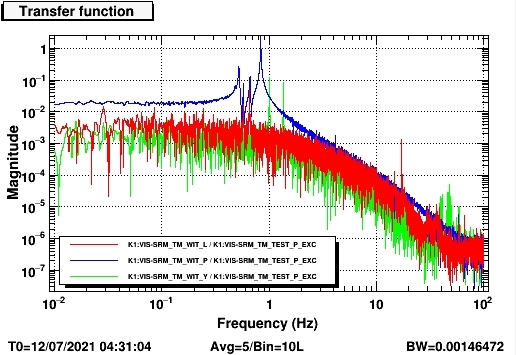
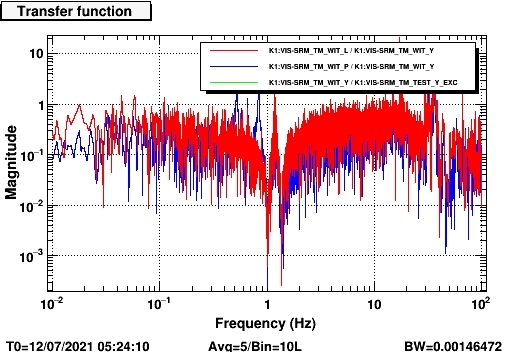
I reverted the actuation matrix EUL2OSEM to 0.25s (for L) and 1s and -1s for (P and Y) and measure transfer functions. The readouts show a very high noise floor which is normal given the optical lever isn't covered with windshields. Nevertheless, Diagonalization was straightforward. And I obtained SENSALIGN matrix as shown in Fig. 2. Transfer functions measurements are shown in the following figures. Yaw transfer function plots were missing due to some unknown bugs, I will have to measure them again later. Nevertheless, the coupling ratios P/Y and L/Y are at the 1e-4 level at yaw resonances (Fig. 5).
Note that the matrices have very low commitments, as I might intercalibrate them with IP readouts. Also, I have not probably L2P coupling as I will use the IP to do so but I am doing minor adjustments at the IP level. But sanity check shows good inter-calibration with the IP.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}