In the First version of ID implemented at ITMX, using accelererometes, I set the blending frequency for L and T at 90 mHz.
In this configuration
-the loops were stable,
-Starting from 0.180 Hz to 0.4 Hz the re-injection of seismic noise was reduced, but the rejection of the accelerometer noise below 0.1 Hz was too great and perhaps it was the reason why the mode 0.08 Hz of BF_Y excited.
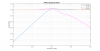
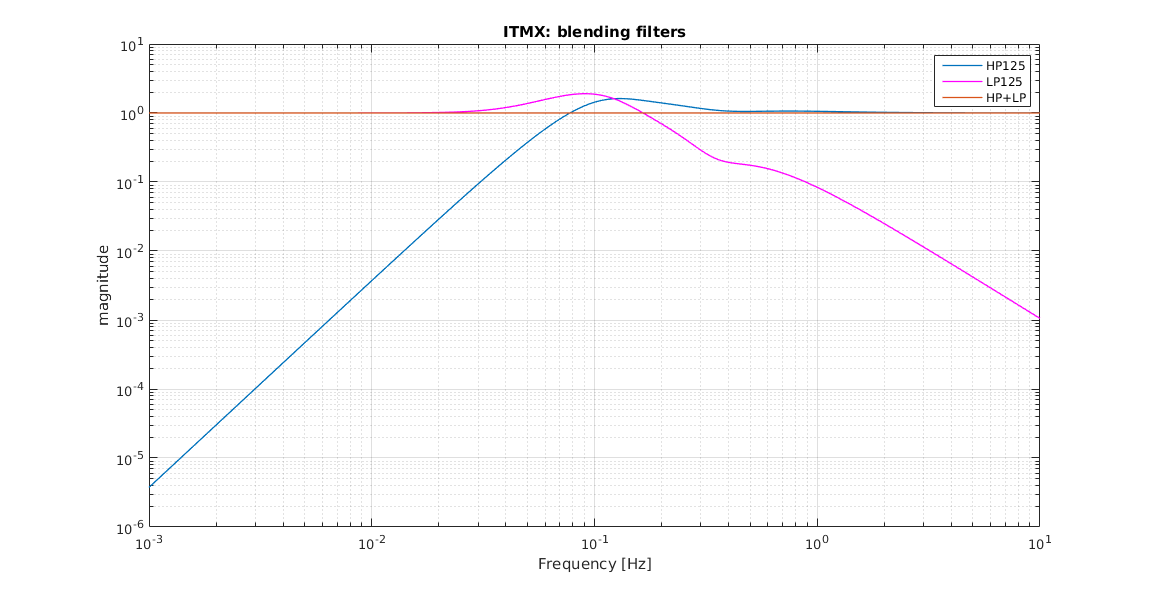
So I tried to implement a new version of ID moving the blending frequency from 90 mHz (in L and T) to 125 mHz (Pic1).
-I turned on the ID only along L and T with UGF at 0.12 mHz.
-Y is controlled with LVDT.
-BF_L , BF_T damping loops and the IP sensor correction were also turned on.
The loops are stable.
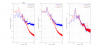
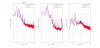
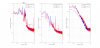
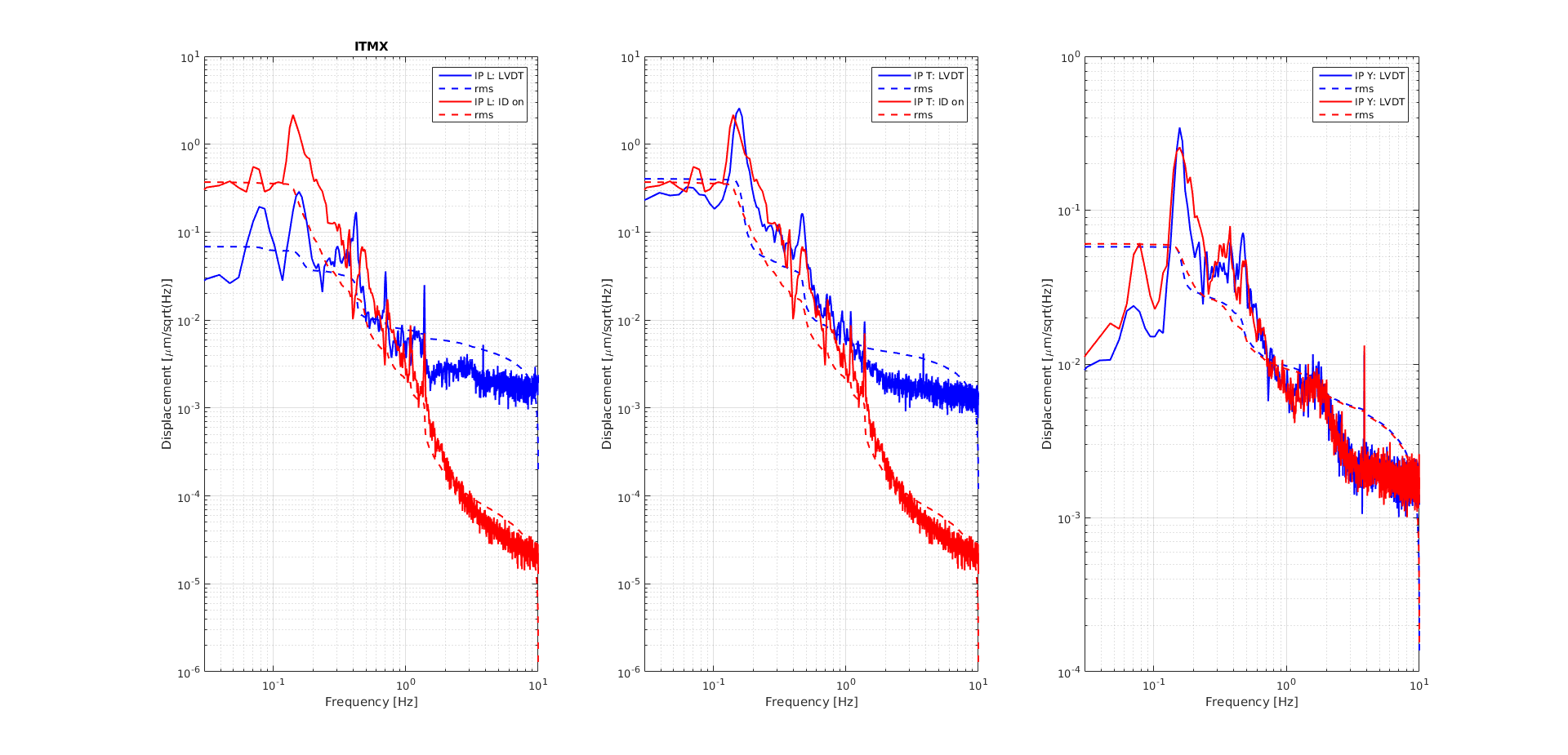
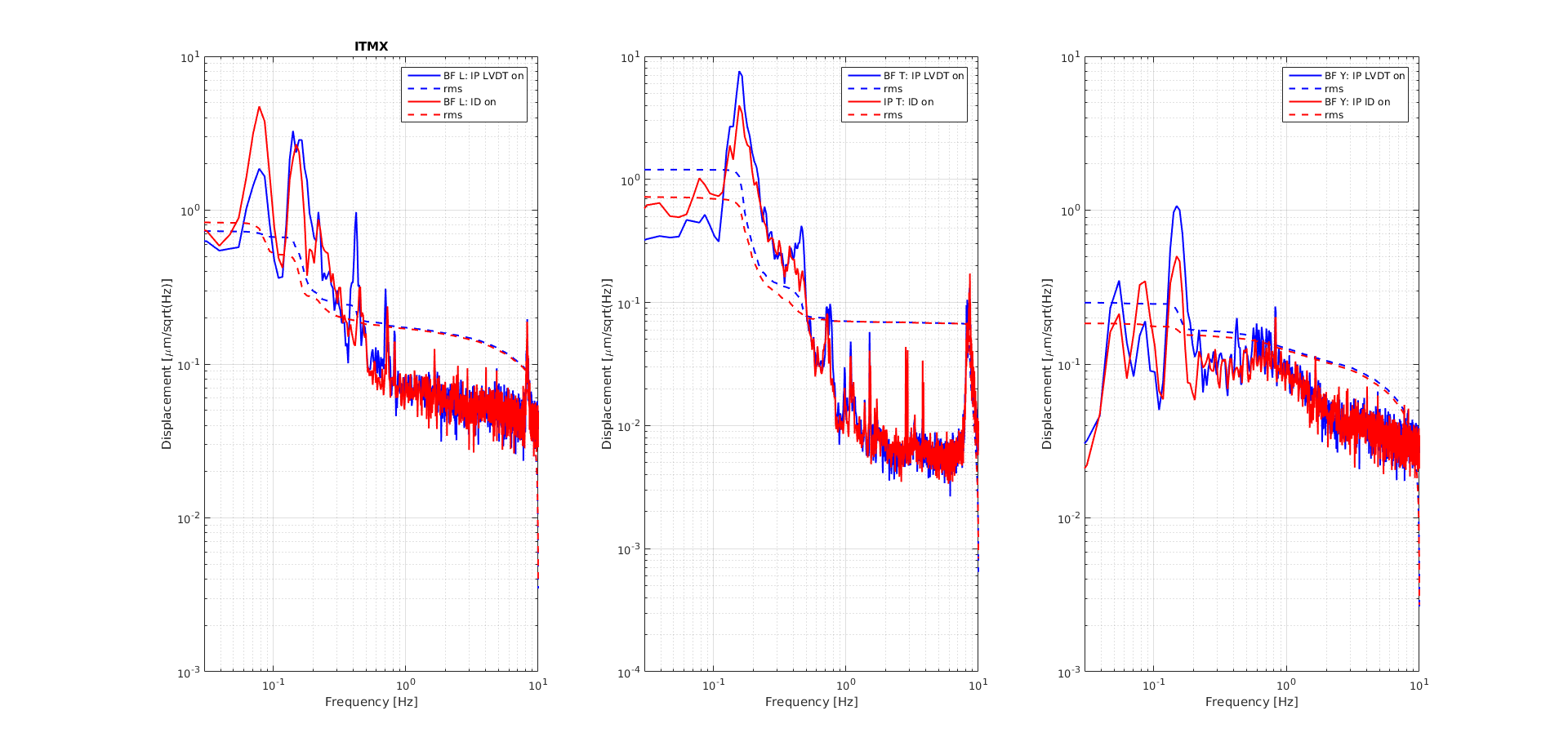
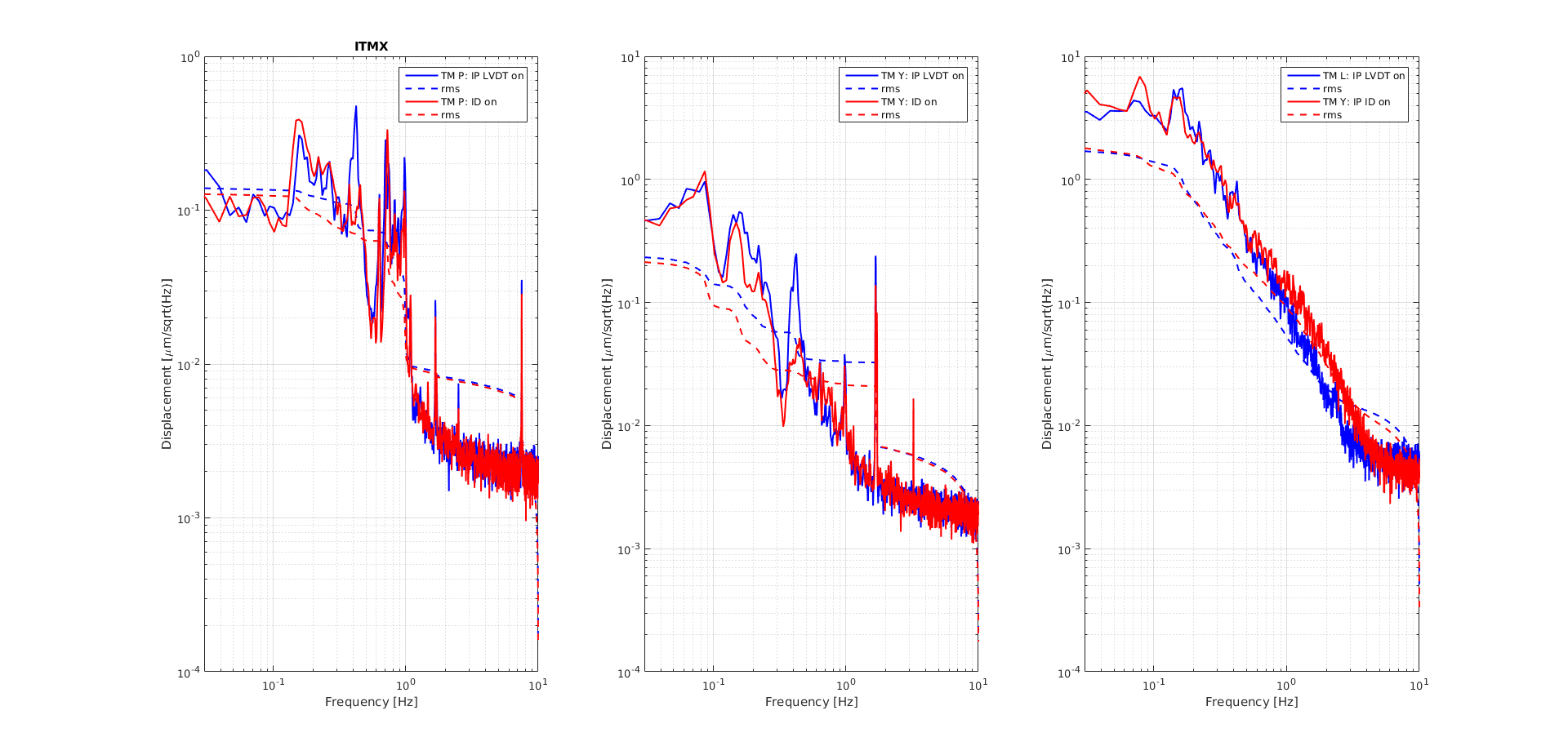
In Pic 2, Pic2 and Pic4 the SPectra of IP (with and without ID), BF (L,T,Y) and TM (P,Y,L) are shown.
We can see that
1) From 0.1 to 0.3 TM P, Y and L motion is reduced because of the ID,
2) IN BF L and T the peack at 150 mHz is dominat.
3) TM L optical lever has large noise (see klog 9681)
RMS of TM and BF (L and T) and IP, in both configuration are reported below.
%% RMS values
| IP | BF | |
| ID: rms L | 0.5 micrometers | 0.6 micrometers |
| ID rms T | 0.5micrometers | 0.6 micrometers |
| ID: rms Y | 0.5 microradians | 0.2 microradians |
| LVDT: rms L | 0.08 micrometers | 0.7 micrometers |
| LVDT: rms T | 0. 5 micrometers | 1.1 microradians |
| LVDT: rms Y | 0.5 microradians | 0.28 micrometers |
| TM: rms P | ID: 0.1 micrometers | LVDT:0.1 microradians |
| TM : rms Y | ID: 0.1 micrometers | LVDT: 0.1 microradians |
| TM: rms L | ID: 1.1 microradians | LVDT: 1.1 micrometer |
{kind=link}
{kind=link}
{kind=link}
{kind=link}