K. Miyo and Y. Fujii,
log on August 9th 2019,
= ETMX =
- We have conducted a sensor correction test mainly focusing on a bump at around 140mHz, which have been observed at all the stages, i.e., IP, BF and TM so far.
- We could suppress the TM-L amplitude at 150mHz successfully by a factor of about 2.7.
- This was true (at least) when the seismic level was high.
== Setting and what we did ==
- The IP was controlled by only LVDTs since the inertial damping with TMMA-accelerometers (for ITMX), with geophones (for ETMs) were still under characterization.
-
We subtracted seismic signal from IP-LVDTs;
- we added local seismometer signal (in displacement) with -1 and with 3mHz cut-off to the IP-LVDT sensor signal. when the cut-off frequency was set to lower frequency like 1mHz, the IP started to oscillate at low frequency and it made the TM-L amplitude larger.
- This subtraction was done only for IP-L dof (just for a test).
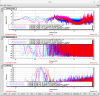
- Figure 1 shows the time series of the IP-L and TM-L w/ and w/o the subtraction.
-
Figure 2 shows displacement transfer functions from the ground motion in L, w/ and w/o the subtraction;
- red-dashed: IP-L signal sensed by geophones (inertial sensors on IP) w/o the sensor correction in [(um/s)/um].
- magenta-solid: IP-L signal sensed by geophones (inertial sensors on IP) w/o the sensor correction in [(um/s)/um].
- blue-dashed: TM-L signal sensed by length-oplev w/o the sensor correction in [um/um].
- cyan-solid: TM-L signal sensed by length-oplev w/ the sensor correction in [um/um].
- This did NOT led larger TM oscillation in P and Y as Figure 3 shows.
- The measurement files are stored in: /users/VIS/typeA/ETMX/LogNotes/20190809/
- To be continued
== For next ==
- implement the correction filter to IP-T and see the vibration isolation ratio to the TM-L.
- check this sensor correction effect to the TM when the seismic noise level is low.
-
compare the vibration isolation ratio with the following filters:
- this sensor correstion at IP
- band-pass filter at BF (like ITMX, klog#9936)
- (usual filter at BF (like ITMY) )


{kind=link}
{kind=link}
{kind=link}