This entry reports the search of the main contributions to the optic residual motion. See previous entries 9702 and 9755.
I measured the coherence between the DoF of the optic, IM and IP in ALIGNED and FLOAT states.
- Directory: /kagra/Dropbox/Subsystems/VIS/TypeBData/SR3/Noise/Measurements/20190805/
- File: SR3_ALIGNED_TM_OPLEV_ASD.xml, SR3_ALIGNED_TM_OPLEV_ASD_YAW.xml.
The highlights in the ALIGNED state are
-
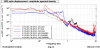
The seismic environment seems noisier today. See klog entry 9702 for reference. See first picture. The integrated RMS values are
-
TM longitudinal: 0.55 µm,
-
TM longitudinal speed: 0.62 µm/s,
-
TM pitch: 0.21 µrad.
-
TM yaw: 0.28 µrad.
-
Additionally there is a large peak in TM-L, TM-P and TM-Y at 0.158 Hz.
-
-
There is high coherence between the following degrees of freedom and frequency bands:
-
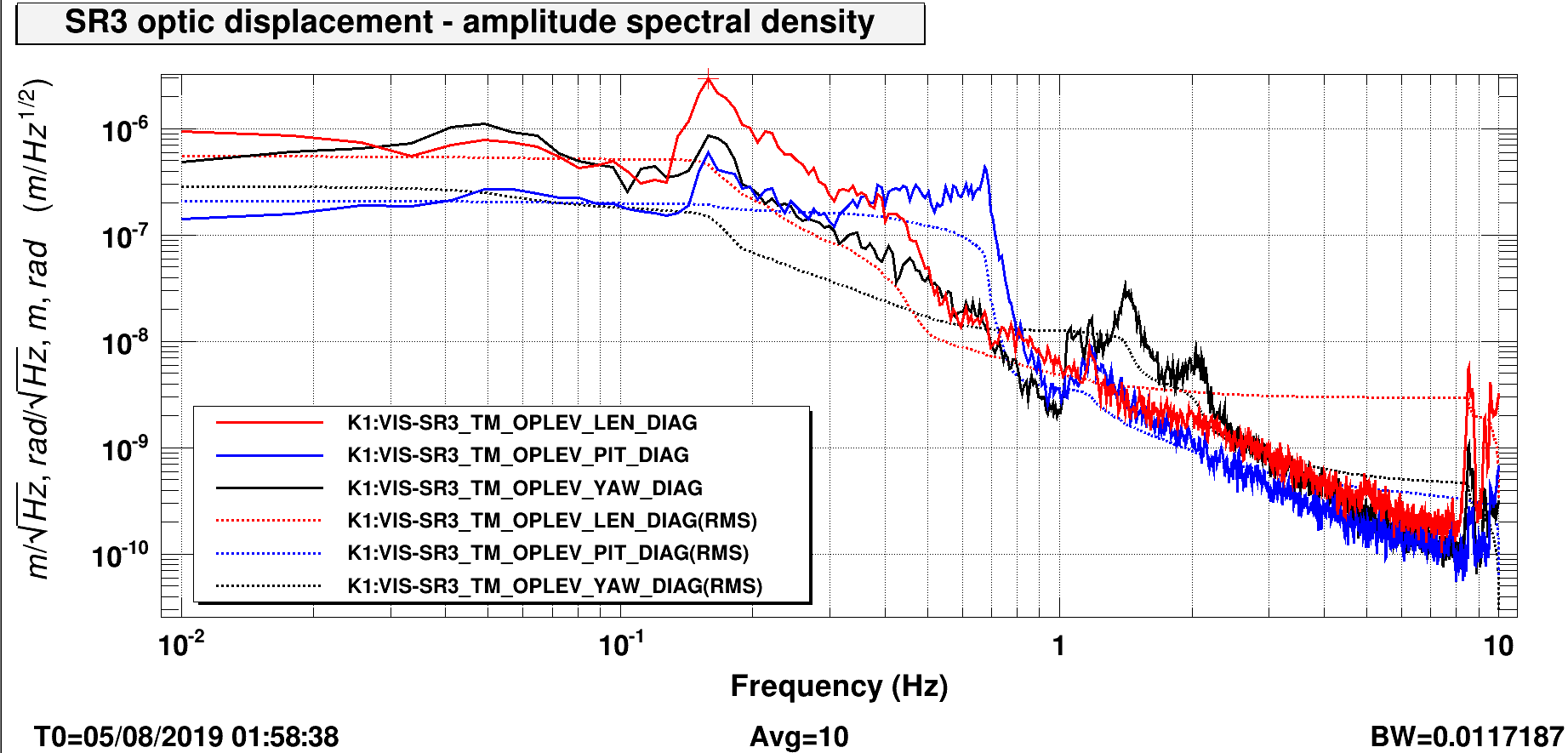
TM-L and TM-P, 0.150 Hz and 0.9 Hz. This is the reason I suspect of IM-L to TM-P coupling. See the second picture.
-
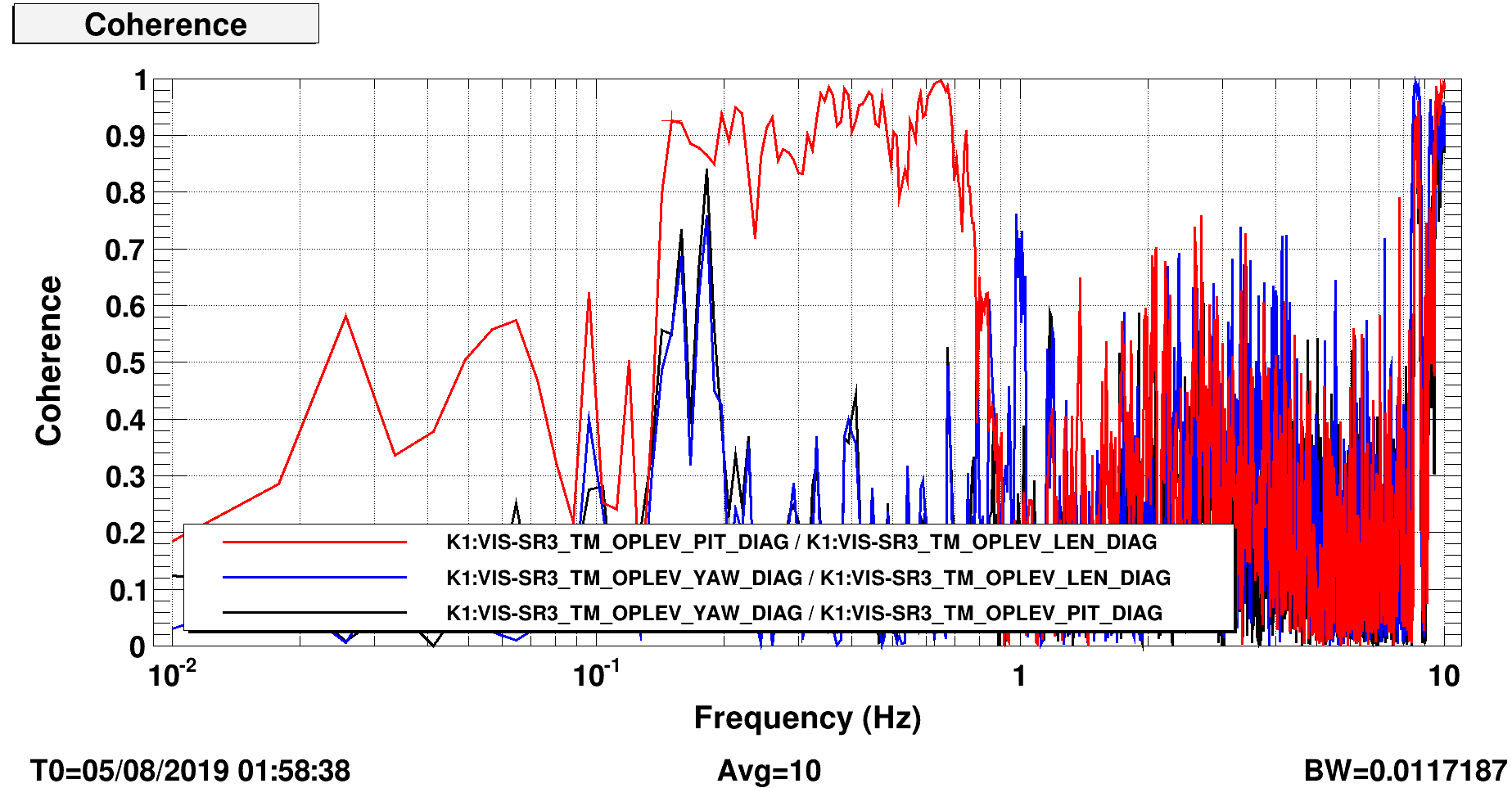
IM-L and TM-L and IM-L and TM-P, 0.35 Hz to 0.8 Hz. See third picture.
-
IM-P and TM-P, 0.15 Hz and 1 Hz. See third picture.
-
IM-P and TM-L, 0.15 Hz and 0.8 Hz. See third picture.
-
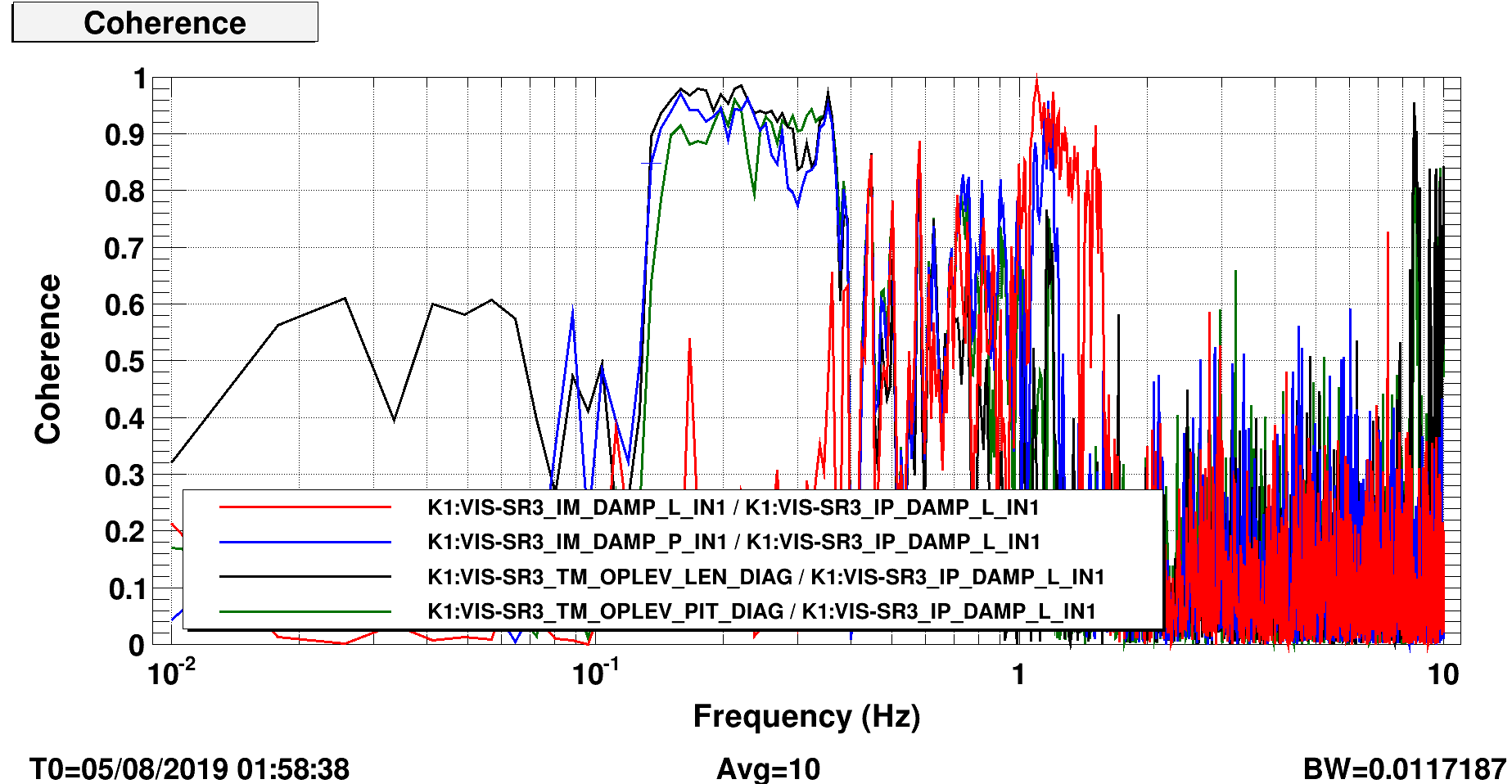
IP-L and each of IM-P, TM-L and TM-P, 0.135 Hz and 0.4 HZ. See fourth picture.
-
IP-L and each of IM-L, IM-P, TM-L and TM-P, above 0.4 Hz has many peaks of coherence up to above 1 Hz. See fourth picture.
-
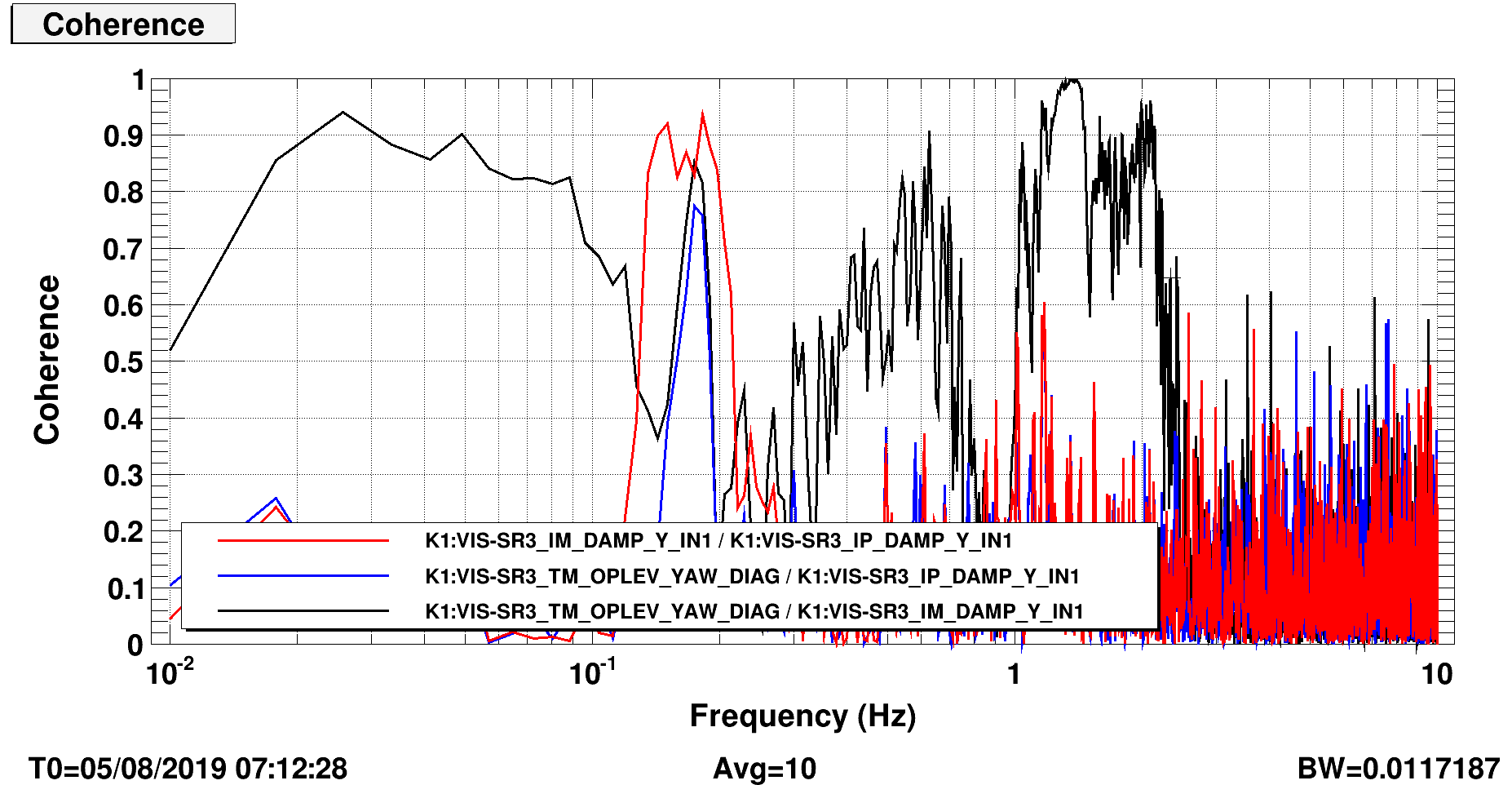
IM-Y and TM-Y, 1 Hz and 2.3 Hz. See fifth picture.
-
-
The conclusions of these measurements are:
- The motion of the IP-L induces motion in TM-P and TM-L in the frequency band from 0.135 Hz to 0.4 Hz. This should be fixed at the IP.
- The motion of the IM-L induces motion in TM-P nd TM-L in the frequency band from 0.3 Hz to 0.8 Hz. Likely, this should be fixed with IML2TMP and IML2TML control filters.
- The motion of the IM-P induces motion in TM-P and TM-L in the frequency band from 0.135 Hz to 1 Hz. The motion in the band from 0.135 to 0.4 Hz is likely ground motion coming from the IP, however, the motion from 0.4 Hz to 1 Hz should be fixed with IMP2TML and IMP2TMP control filters.
- The motion in IM-Y induces motion TM-Y between 1 Hz and 2.3 Hz. This should be fixed with IMY2TMY control filters.
- The IP does not use currently use inertial damping.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}