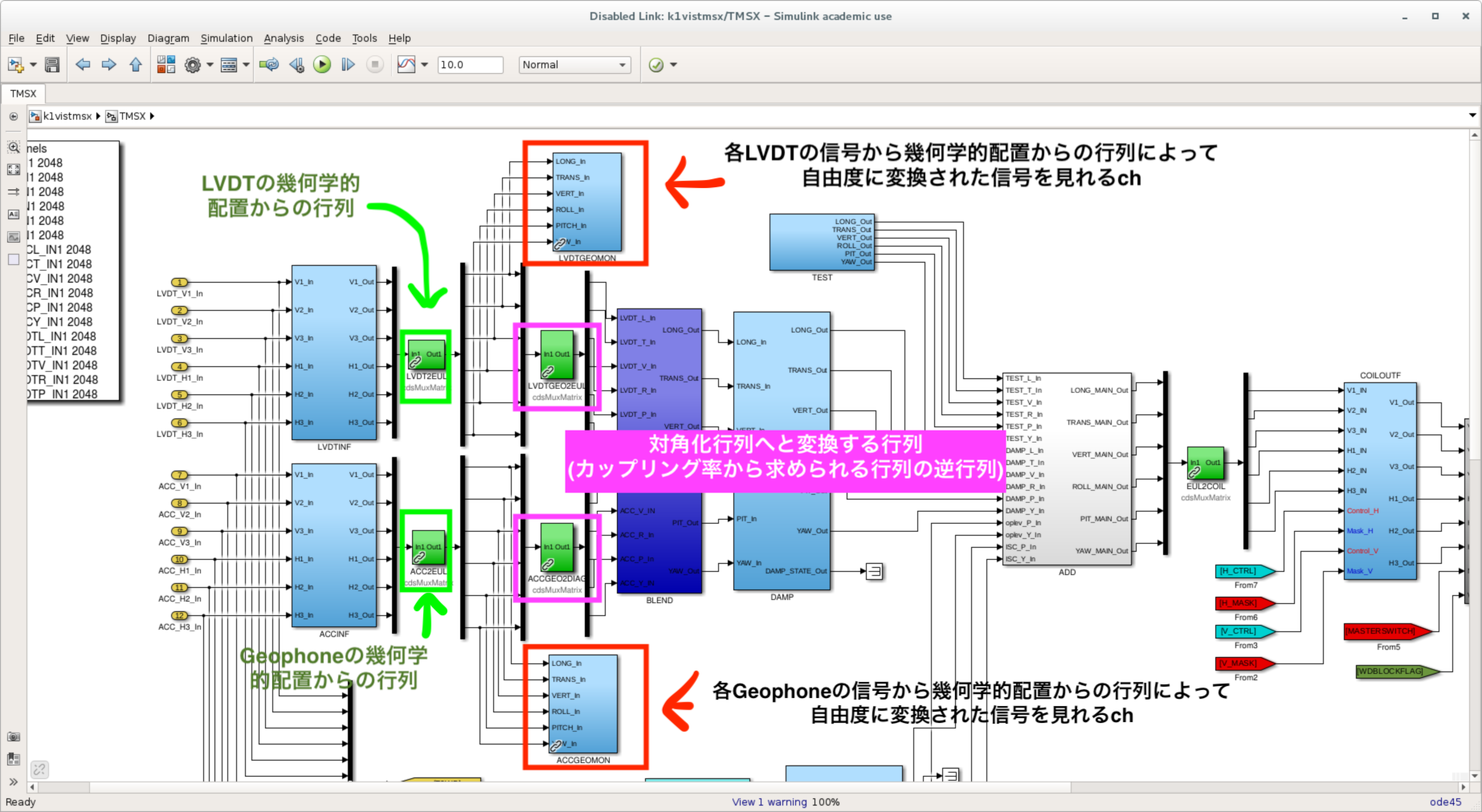
I changed RT model of TMSX-VIS(fig 1) in order to see both the DoF signal which is converted by a matrix of sensors’ geometrical position and the one which is converted by diagonalized matrix.
I changed RT model of TMSX-VIS(fig 1) in order to see both the DoF signal which is converted by a matrix of sensors’ geometrical position and the one which is converted by diagonalized matrix.

{kind=link}