[Fujii, Kambara, Okutomi]
- Oplev calibration is implemented
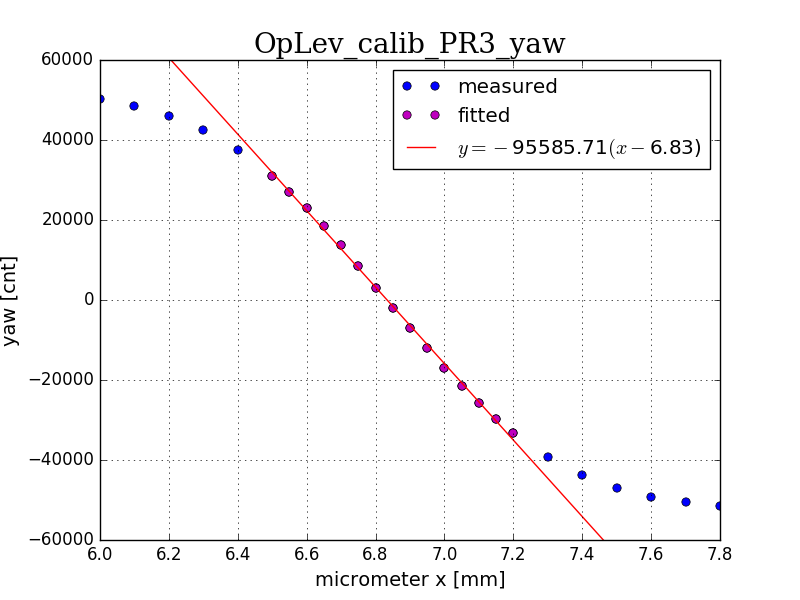
As posted in http://klog.icrr.u-tokyo.ac.jp/osl/?r=884, Fujii-kun and I measured calibration of an optical lever in PR3.
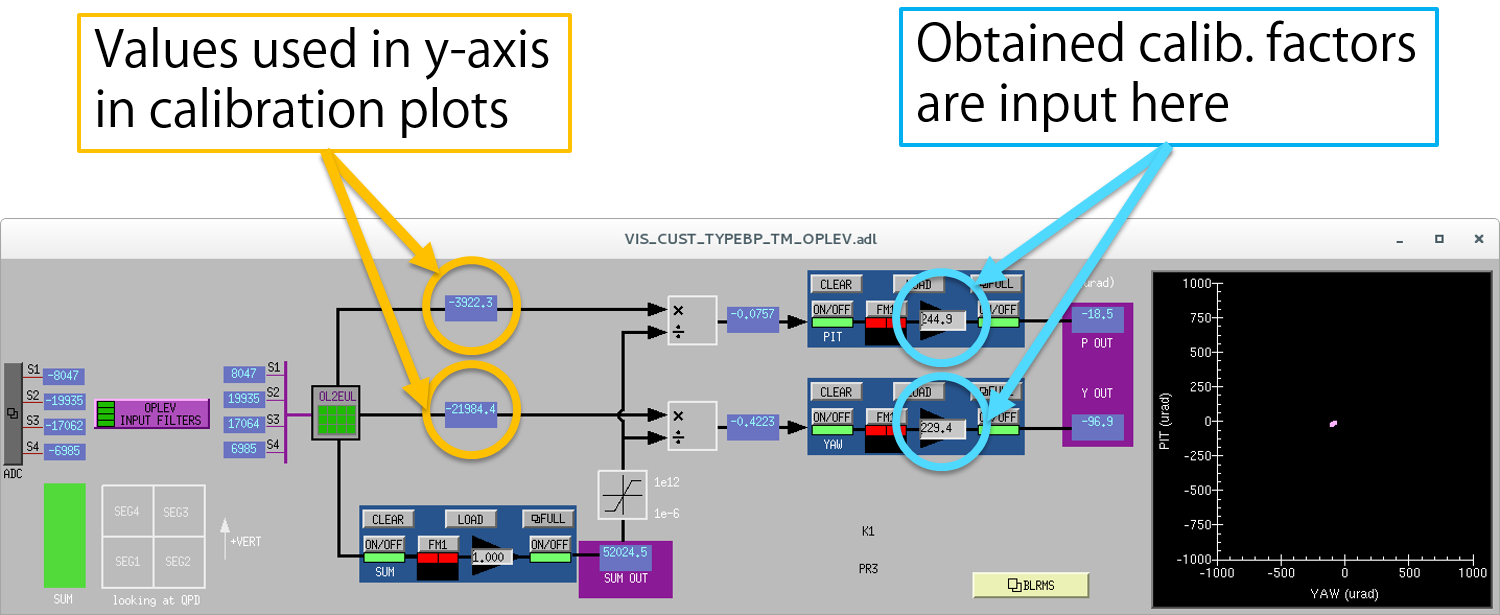
Today I implemented the calibration factor into the medm of oplev: VIS_CUST_TYPEBP_TM_OPLEV.adl
Further information of this calibration is shown in attached figures. please take it a look.
-------------------------------------------------------------
DoF calib. factor [urad/(normalized cnt)]
-------------------------------------------------------------
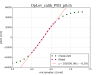
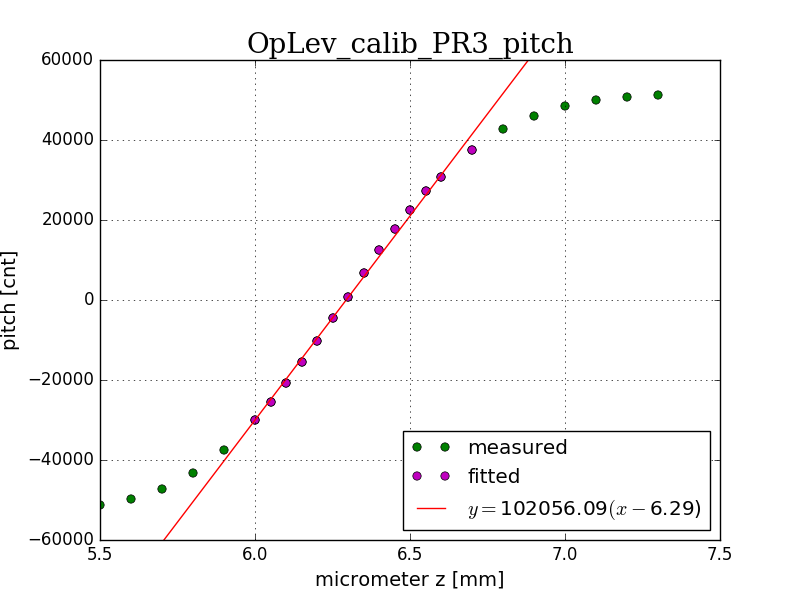
pitch 244.89
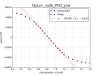
yaw 229.36
** Normalized factor of [cnt] I used is 52200.
** Distance between QPD and reflection point on the mirror is 790(mirror-view port, from drawings) + 325(view port-QPD, measured) mm
** Both in pitch and yaw, their linear range is ~ +-250 urad
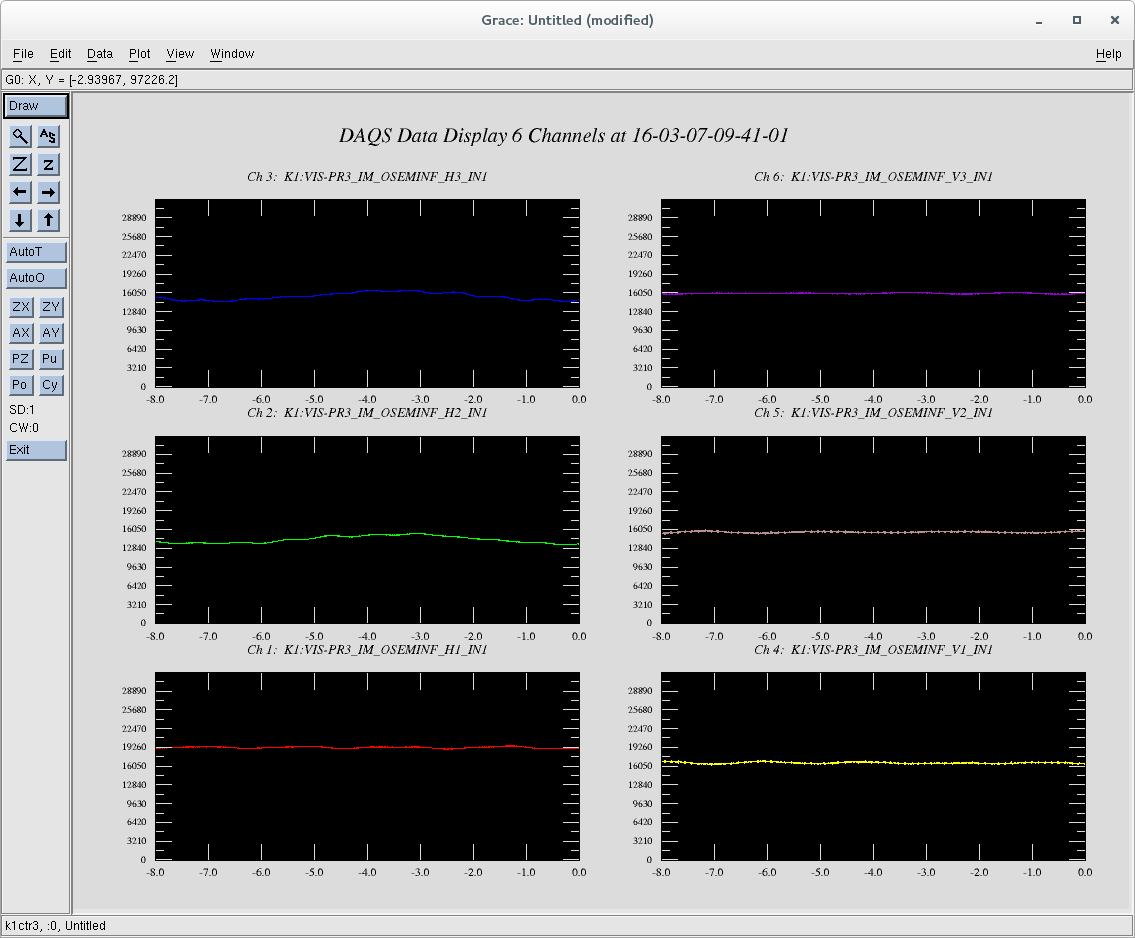
- DC position of IM OSEMs are adjusted again
Kambara-kun and I adjusted DC position of IM OSEMs because some signals are out of their linear range.
You can see all of the signals are in their linear range in attached figure (with damping)
We also checked that
- IM picomotor can be activated from the medm
- we can tilt the mirror to which we want by OSEM offsets. This is confirmed by watching behavior of the beam spot at IXA.


{kind=link}
{kind=link}
{kind=link}
{kind=link}