With Mark and Lucia,
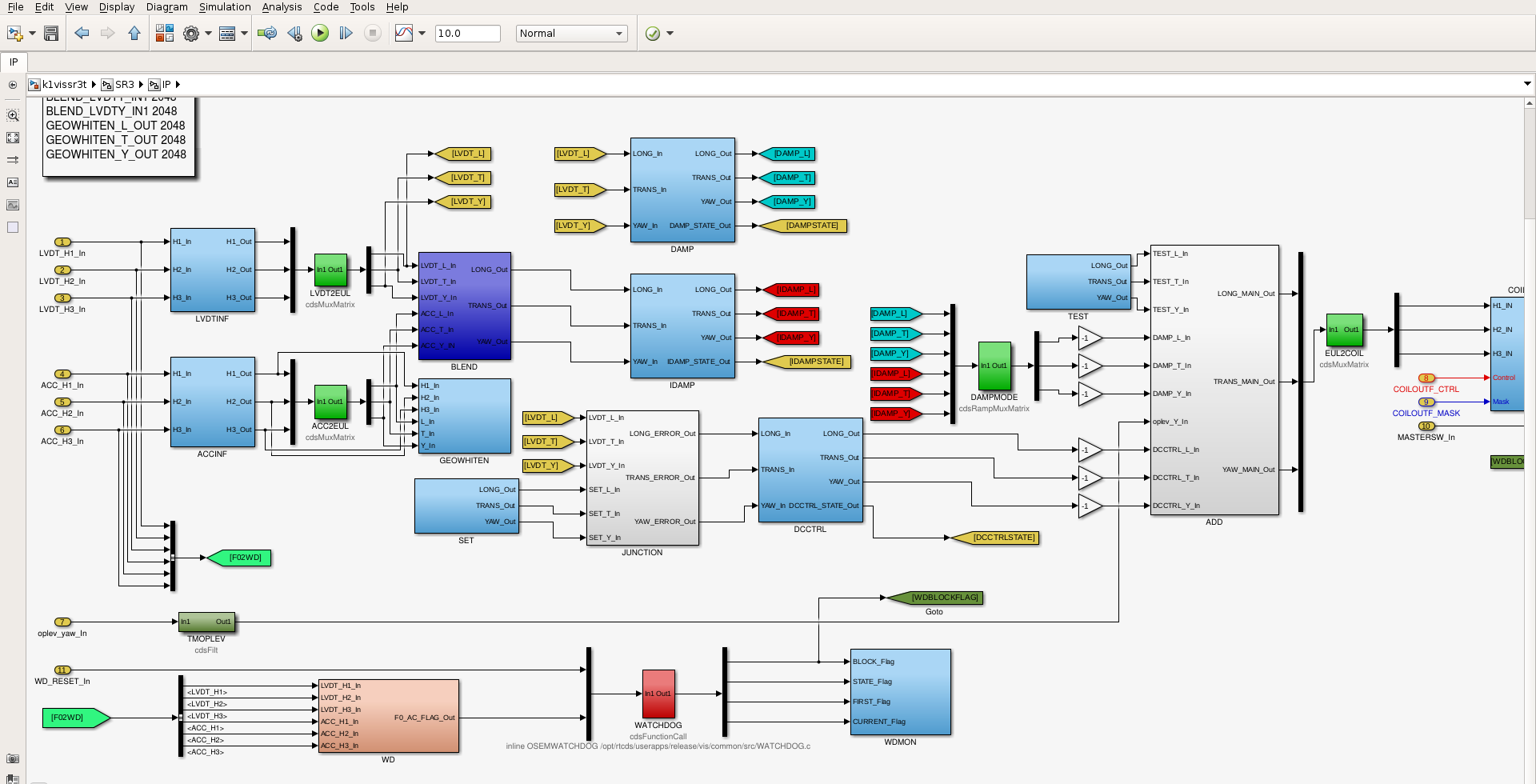
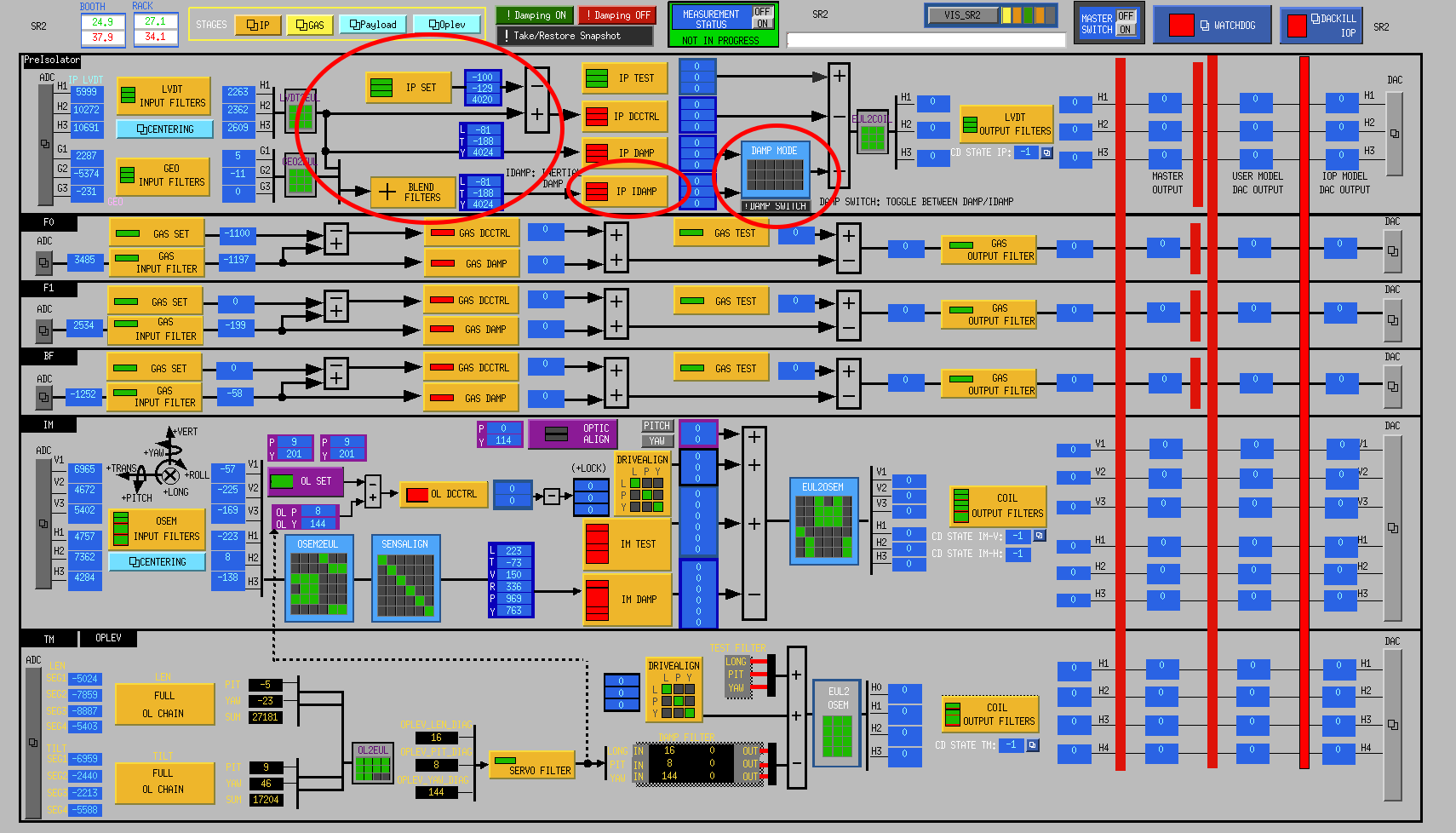
In preparation of implementing the inertial damping for type B suspensions, we made some changes in the type B tower model so to allow the operator to switch between normal damping and inertial damping easily. We added a block call IDAMP where the inertial damping filter should go in. We added a matrix after the two damping blocks and a switch called DAMP SWITCH that will run vistools.py with the corresponding arguments in the CLI which will changes values in the matrix. The 3-by-6 matrix is likely to be set to an assembly of a 3-by-3 identity matrix and a zero matrix to act as a 1/0 pair which enable/disable the IDAMP/DAMP output. The matrix comes from a CDS part called cdsRampMulMatrix and the reason for using this part is to allow smooth transition between normal damping and inertial damping if necessary to avoid unnecessary kick.
Note that the error signal to the DC control and the normal damping control is now from the LVDT directly, while the error signal to the inertial damping control is from the blend filter. Please see attached screenshots for the changes made in the Simulink model as well as the new MEDM screen.


{kind=link}
{kind=link}
{kind=link}