This entry describes the alignment of the suspension after pump down last week. This is a delayed report from the 20th of February. After the recovery the suspension looked healthy.
Temperature: T= 24.3 ºC (24 ºC requested)
Inverted pendulum
Positions of IP LVDTs and stepper motors before and after pump down:
- H1: -2,878 µm ⇒ -2,716 µm ; 25,000 steps ⇒ -90,000 steps
- H2: -3,275 µm ⇒ -3,389 µm ; -25,000 steps ⇒ 30,000 steps
- H3: -3,417 µm ⇒ -3,428 µm ; -40,000 steps ⇒ 70,000 step
Bottom filter
The FR was enoug to put the keystone to zero.
The position of the LVDT and of the stepper motor before and after this exercise were:
- LVDT: -638 µm ⇒ 2 µm.
- Motor #0: 1,000 steps ⇒ -131,000 steps.
- We don't know what the position of the stepper motor is with respect to the original calibration reported in entry 4721.
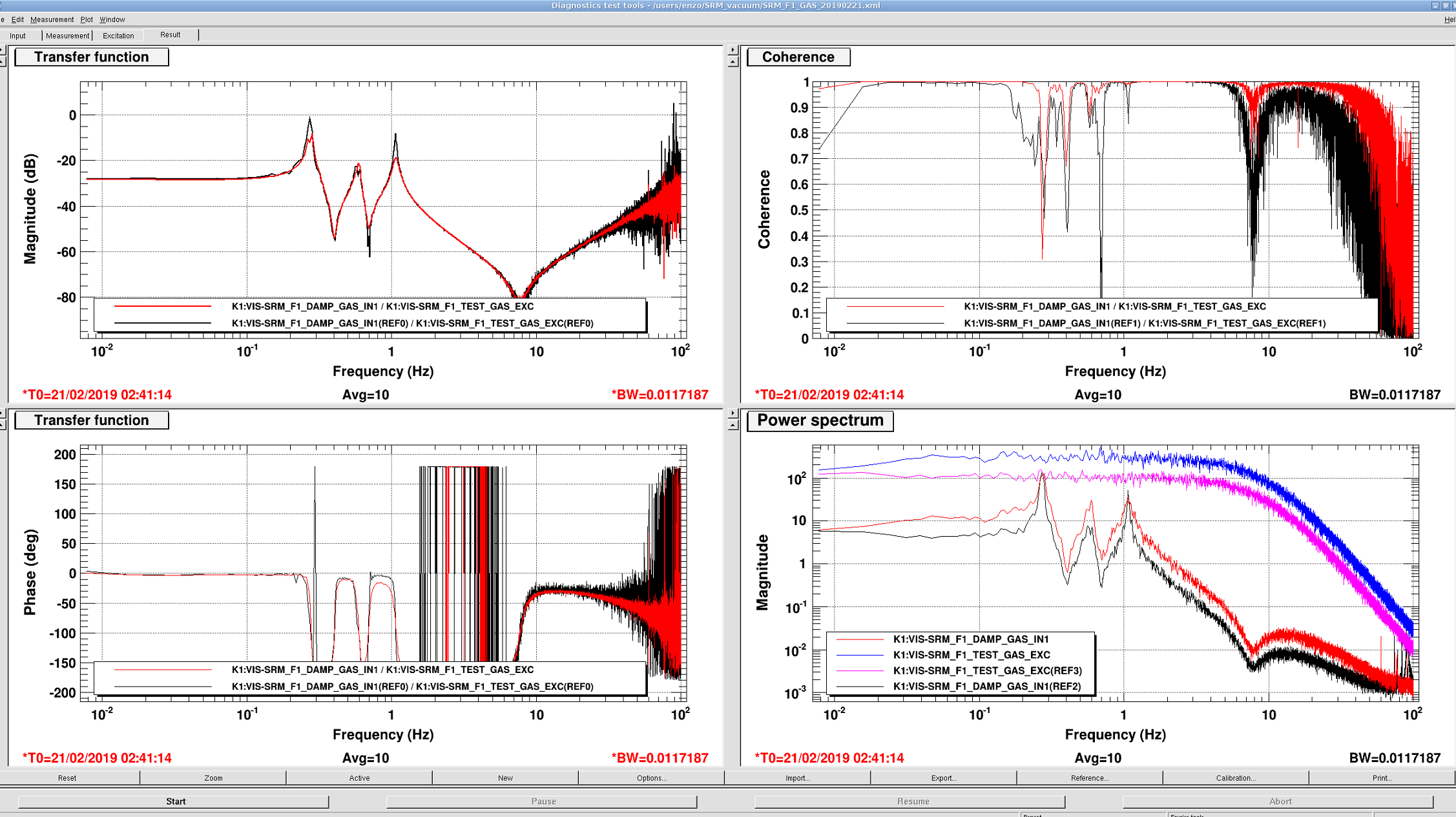
Standard Filter F1
The FR was enoug to put the keystone to zero. The position of the LVDT and of the stepper motor before and after this exercise were:
- LVDT: -770 µm ⇒ 1 µm.
- Motor #0: -30,000 steps ⇒ -480,000 steps.
- We don't know what the position of the stepper motor is with respect to the original calibration reported in entry 4721.
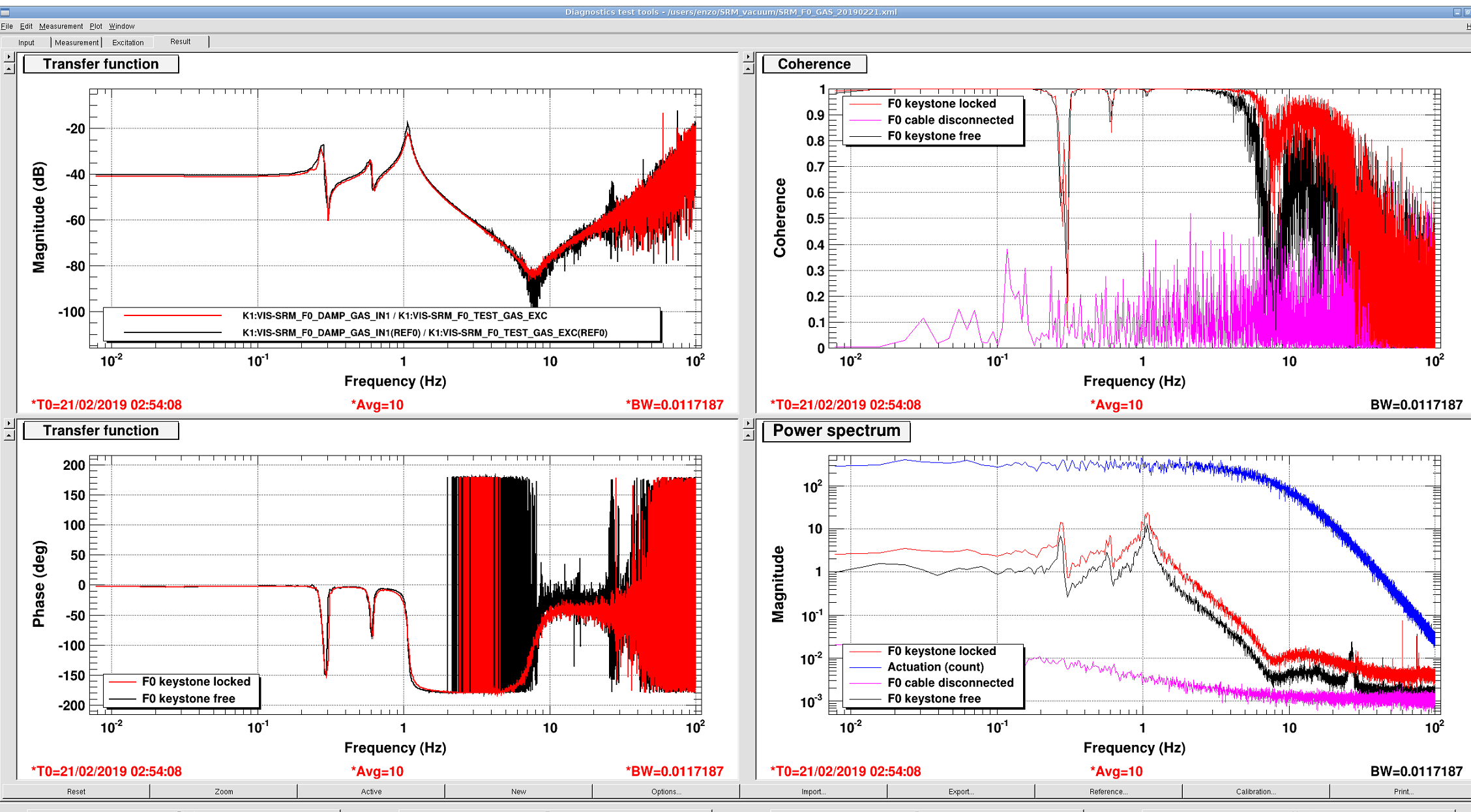
Top filter F0
The FR was enoug to put the keystone to -1,600 µm. The position of the LVDT and of the stepper motor before and after this exercise were:
- LVDT: -1,977 µm ⇒ -1599 µm (aim -1600 µm).
- Motor #0: -130,000 steps ⇒ -1,125,000 steps.
- See entry 7857.
Intermediate mass
I moved the IM pico-motors to recover the yaw and roll mesured by the OSEMs:
- IM yaw: 692 µrad ⇒ 0 µrad
- IM roll: 136 µrad ⇒ 0 µrad
Oplev
I didn't recover the signal. The beam is out of the QPD is I have to see it when moving the suspension.
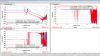
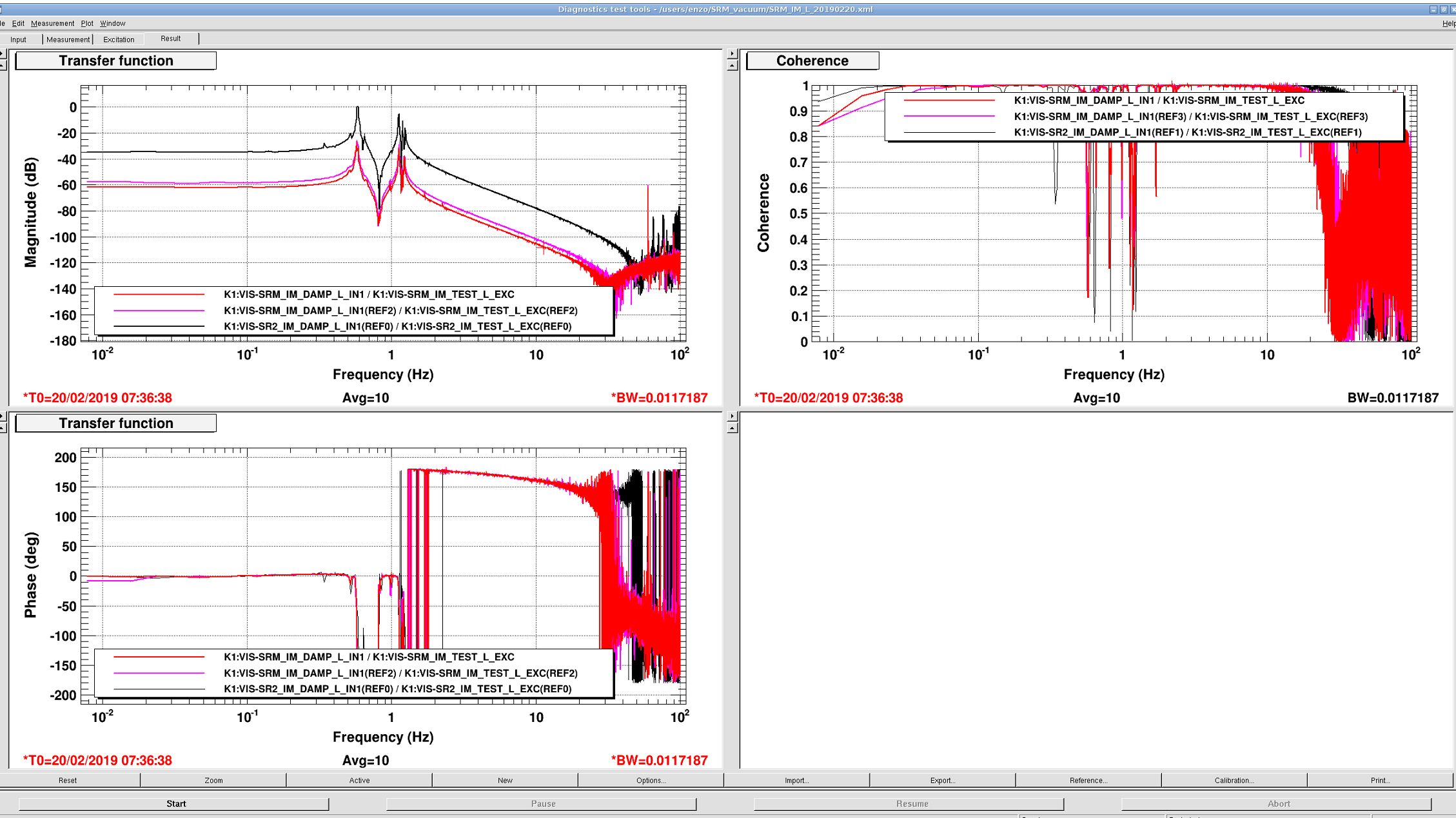
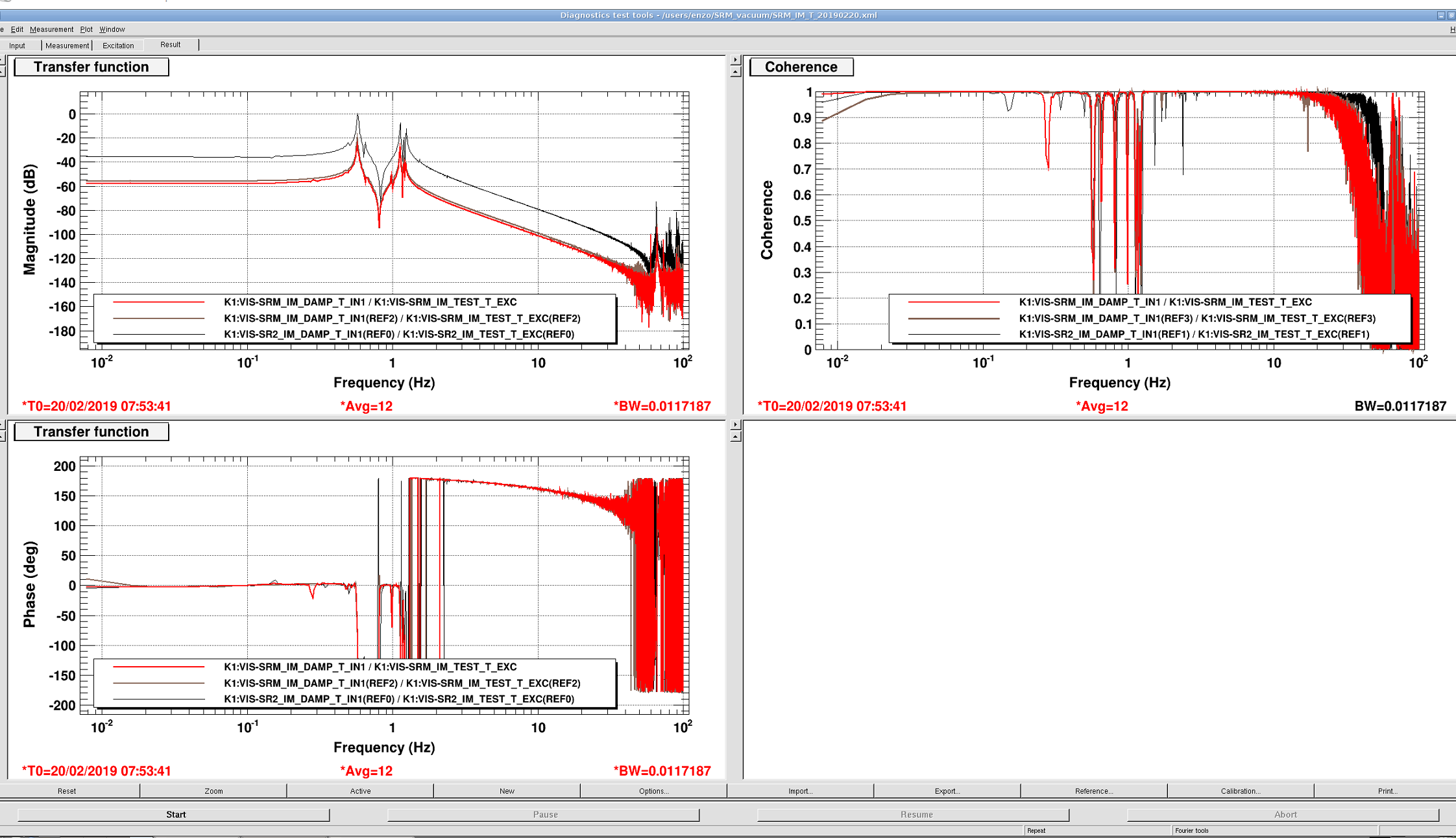
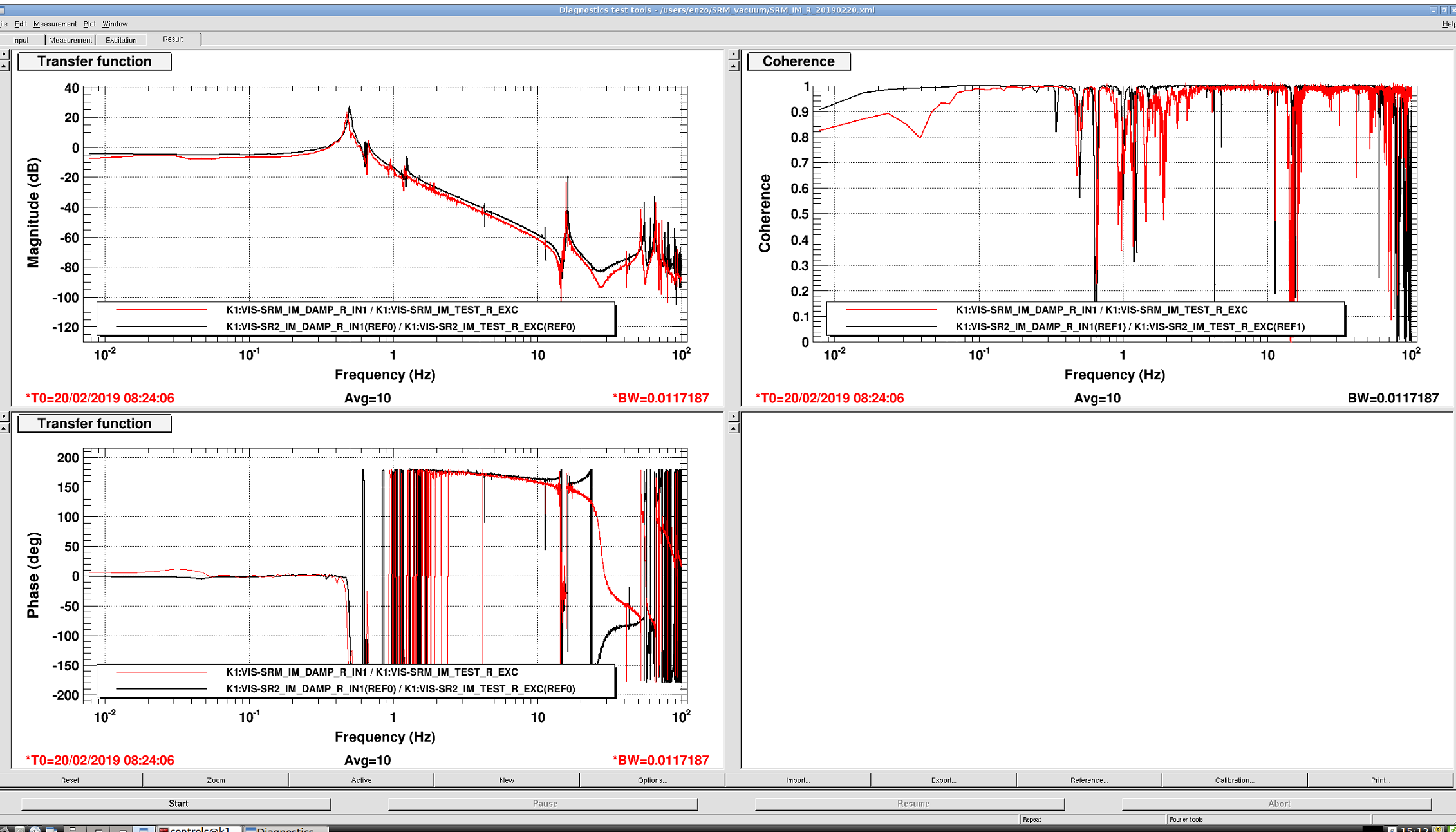
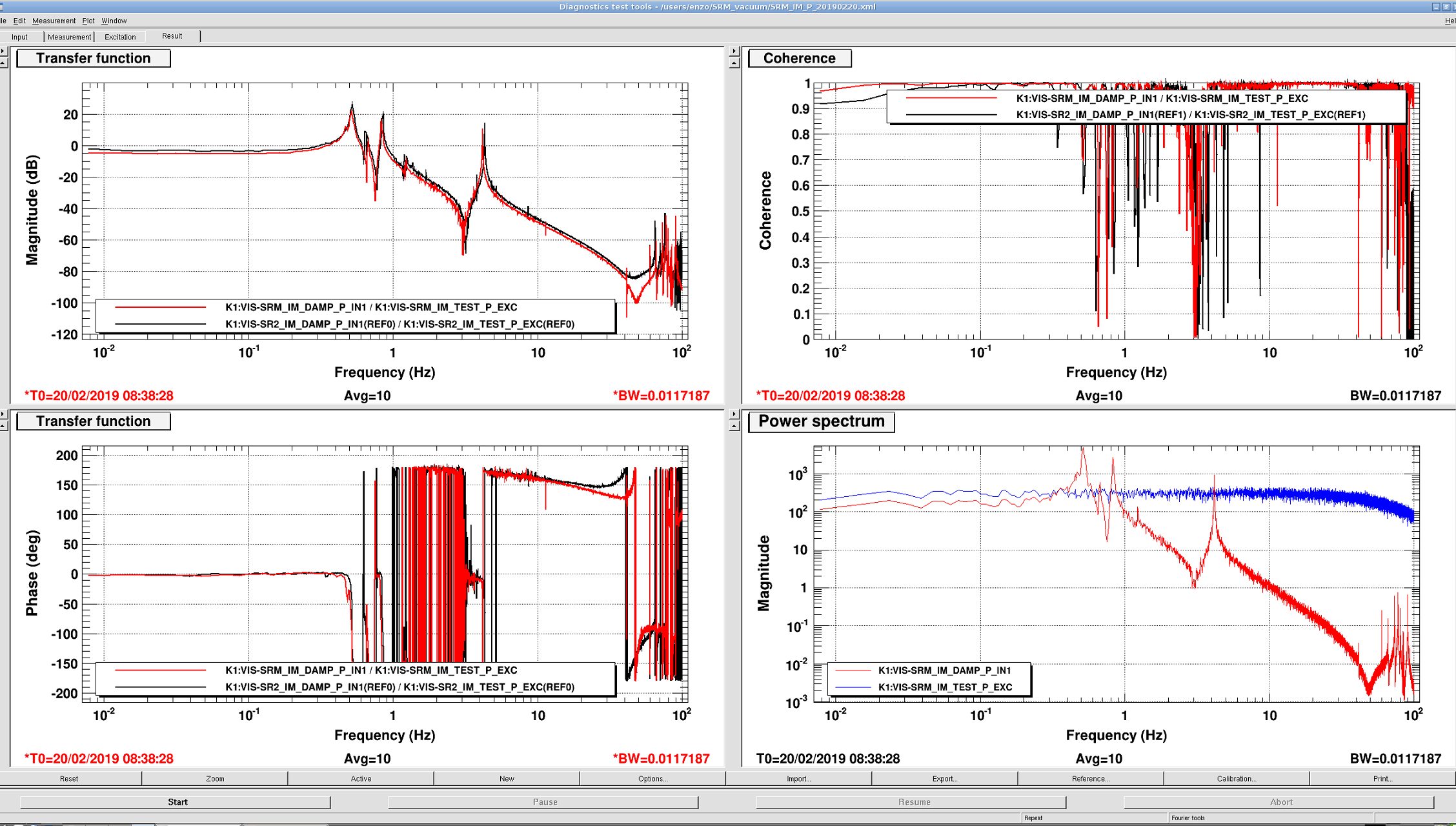
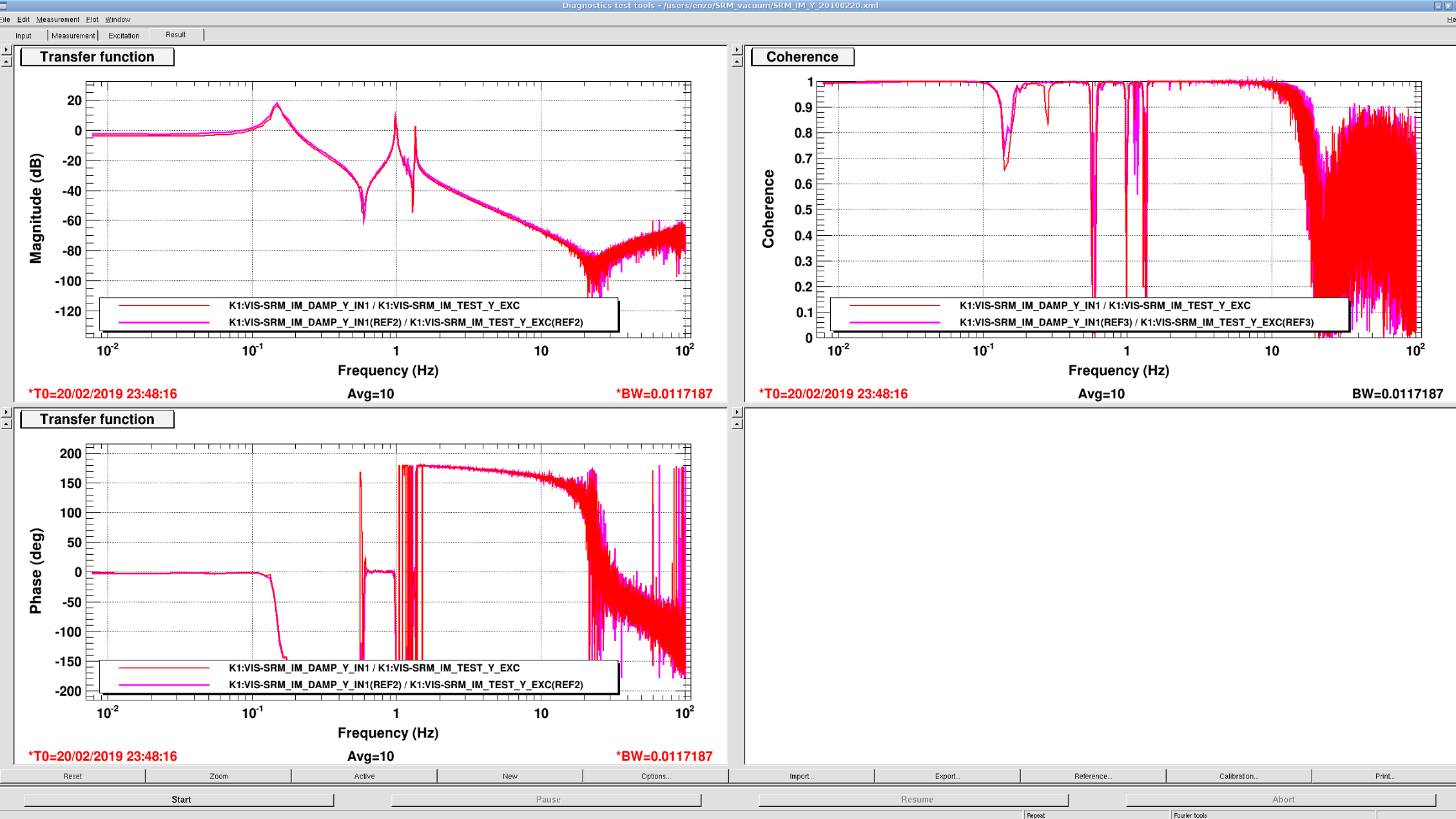
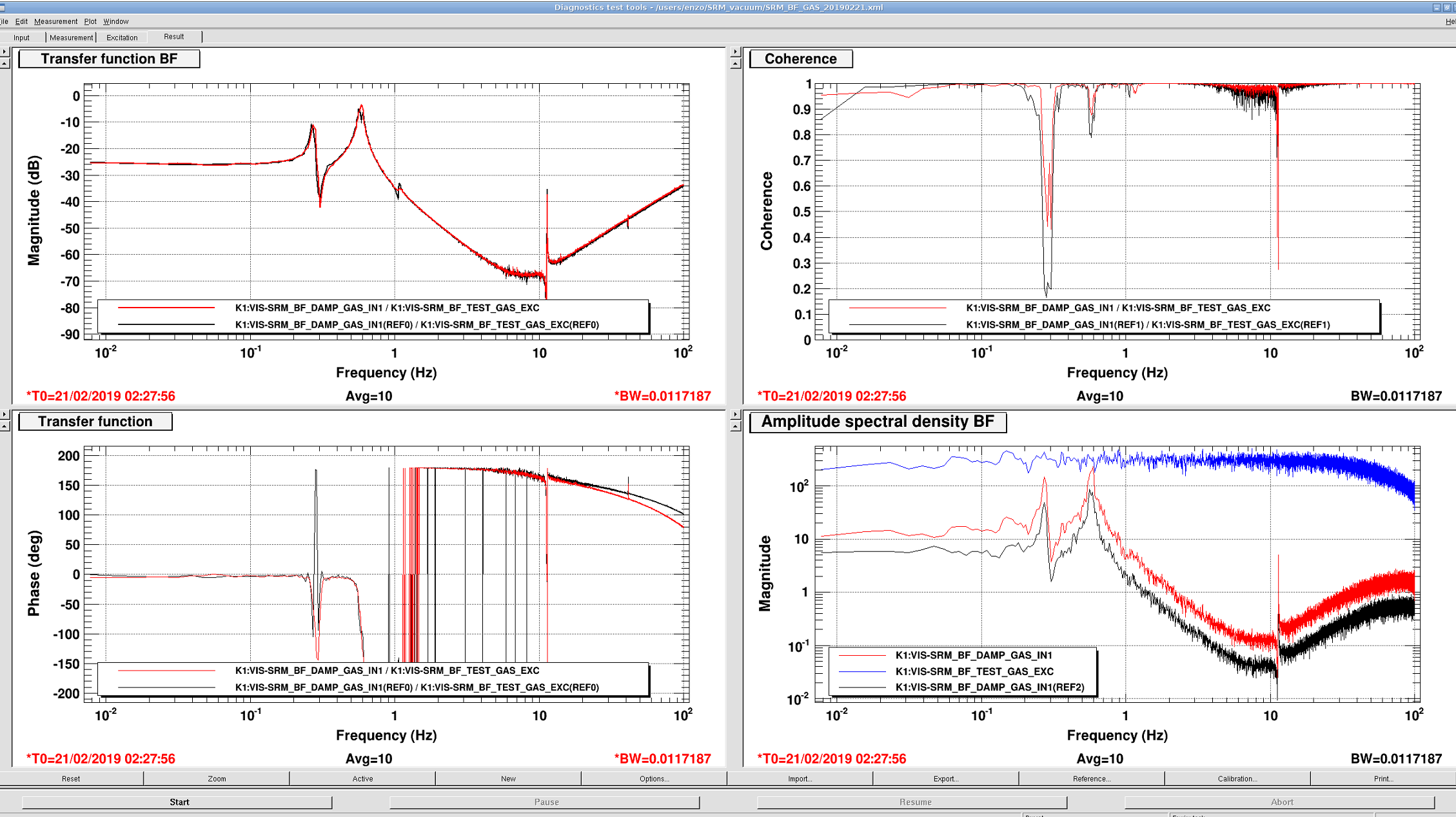
Trasnfer functions
I measured transfer functions of the IM and GAS filters. The system looked healthy.
The IP case will be reported in another entry. According to those measurements the system was healthy also.
Directory: /users/enzo/SRM_vacuum/
Date: 2019-02-20
The templetes come from
Directory: /users/enzo/SRM_inside_tank/
Date: 2019-02-12








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}